一种消化内镜医生辅助手臂
1.本发明涉及医疗辅助设备技术领域,具体涉及一种消化内镜医生辅助手臂。
背景技术:
[0002] 经消化道直接获取图像或经附带超声及x线的设备获取消化道及消化器官的超声或x线影像,以诊断和治疗消化系统疾病的一组设备。但消化内科医生在使用胃肠镜来给患者进行胃肠检查时,需要左手悬空持内镜操作部,保持内镜操作部直立状态,以虎口以及腕部的力量撑住内镜,而右手持软管部控制内镜的进退,其中左臂需要长时间保持曲肘抬手姿势,长此以往将导致医生的左臂疲劳、肌肉劳损等问题,可能会导致操作时间延长、操作精度下降,这样既对医生自身健康是一危害又可 能会增加患者不适感及误诊、漏诊。
[0003]
因此,需要提供一种辅助装置来进行消化内镜的检查操作,为此我们提供了消化内镜医生辅助手臂。
技术实现要素:
[0004]
本发明要解决的技术问题是提供一种内镜医生辅助手臂,协助医生控镜。
[0005]
为解决上述技术问题,本发明采取如下技术方案:一种内镜医生辅助手臂,包括手掌组件、腕关节、前臂、肘关节、上臂、肩关节和底座;所述的手掌组件上设置有用于输送内镜的输送组件和用于固定内镜的固定组件;所述的手掌组件通过腕关节与前臂连接;所述的腕关节用于将手掌组件上抬或者下压或者使手掌组件前进或者后退;所述的前臂通过肘关节与上臂连接;所述的肘关节用于控制前臂左旋或者右旋;所述的上臂通过肩关节与底座连接;所述的肩关节控制上臂摆动。
[0006]
进一步地,所述的手掌组件包括手指组件、手掌组件和手指控制组件;所述的手掌组件为一固定板;所述的手指组件包括第一指节、第二指节、第三指节;所述的第一指节和第二指节转动连接;所述的第二指节和所述的第三指节转动连接;所述的第三指节与所述的固定板转动连接;所述的手指控制组件用于控制手指组件的指节弯曲或者伸直。
[0007]
进一步地,所述的手指控制组件包括气筒、推动杆、连杆一和连杆二;所述的第二指节和第三指节结构相同均为中空的筒状结构;所述的第二指节和第三指节内以及固定板上均设置有密闭的气筒;所述的气筒内设置有活塞体;所述活塞体的前端设置推动杆;所述推动杆的前端伸出气筒与一移动块连接;连杆一的后端与移动块转动连接,前端与连杆二的后端转动连接,所述连杆二的前端与位于起前端的指节一侧固定连接;所述气筒通过气管与供气组件连接。
[0008]
进一步地,所述的输送组件包括设置于食指和无名指的第一指节和第三指节上的输送环;所述的输送环套设在所述的第一指节和第三指节外周,并且通过旋转组件绕指节外周转动;食指和无名指的第一指节和第三指节外周设置有导向滑槽;输送环内侧设置有与导向滑槽匹配的导向滑块;所述的旋转组件包括设置于指节外侧的驱动齿轮;所述的输送环上设置有与驱动齿轮啮合的齿环;所述的驱动齿轮由驱动电机驱动。
[0009]
进一步地,所述的输送环外侧设置有弧形凹槽;所述的弧形凹槽内设置有防滑橡胶垫;所述的防滑橡胶垫与弧形凹槽之间设置有多个伸缩弹簧。
[0010]
进一步地,所述的固定组件包括设置于中指第一指节上的第一弧形夹片和第三指节上的第二弧形夹片;所述的第一弧形夹片和第二弧形夹片内设置有减压垫;所述的第一弧形夹片和第二弧形夹片分别固定在伸缩气缸一和伸缩气缸二上;所述的伸缩气缸一和伸缩气缸二分别安装于中指第一指节和第三指节上。
[0011]
进一步地,所述的腕关节包括上部活动板和下部固定板;手掌组件的固定板与上部活动板固定连接;下部固定板与前臂的固定连接;所述的上部活动板与一提升板滑动连接;且上部活动板由横移驱动组件驱动其横向往复移动;所述提升板通过升降组件驱动其上下往复移动。
[0012]
进一步地,所述的肘关节包括下部固定座和上部旋转座;所述的上部旋转座与所述的下部固定座转动连接;所述的下部固定座与上臂固定连接;所述的上部旋转座与所述的前臂固定连接;所述的下部固定座设置有驱动上部旋转座转动的旋转平台。
[0013]
进一步地,所述的肩关节包括连接臂一、连接臂二、支撑臂一和支撑臂二;所述底座上固定设置有支撑臂一和支撑臂二;连接轴的两端与支撑臂一和支撑臂二固定连接;所述连接臂一、连接臂二的上端与上臂固定连接,下端与连接轴转动连接;所述的连接轴上设置有驱动齿轮二;所述上臂下方设置有与齿轮二啮合的弧形齿条;连接轴由旋转电机驱动。
[0014]
进一步地,所述的底座内设置有容纳空间;所述的容纳空间内设置有升降座;所述的上臂通过肩关节与升降座连接;所述的升降座通过升降组件安装于所述的容纳空间内;所述的上臂包括臂体和顶部翻板;所述的顶部翻板的一侧与臂体铰接连接,另一侧通过牵引绳与臂体内的收放线组件连接;肘关节固定安装于翻板上表面;所述翻板的下表面设置有定位座;所述定位座的两侧设置有定位槽;所述臂体顶部设置有与定位座匹配的定位腔;所述定位腔的两侧设置有定位卡块;所述的定位卡块由固定安装于定位腔侧壁的定位气缸驱动。
[0015]
本发明的有益效果为:本发明的内镜医生辅助手臂能够有效协助医生控镜,在医生做胃肠镜操作时,协助医生固定、左旋、右旋、前进、后退镜身,让医生可以空出一只手去操作。
附图说明
[0016]
下面结合附图和实施例对本发明作进一步说明。
[0017]
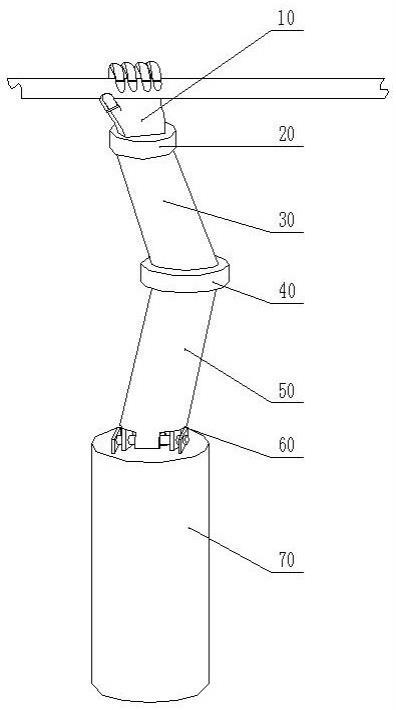
图1为本发明的结构示意图。
[0018]
图2为手指控制组件结构示意图。
[0019]
图3为手指控制组件控制手掌握拳状态示意图。
[0020]
图4为输送组件的示意图。
[0021]
图5为输送环的剖视图。
[0022]
图6为固定组件的示意图。
[0023]
图7为腕关节的结构示意图。
[0024]
图8为肘关节示意图。
[0025]
图9为肩关节结构示意图。
[0026]
图10为可折叠上臂的结构示意图。
具体实施方式
[0027]
下面将通过具体实施方式对本发明的技术方案进行清楚、完整地描述。
[0028]
参考图1-图10,为本发明的一种内镜医生辅助手臂,包括手掌组件10、腕关节20、前臂30、肘关节40、上臂50、肩关节60和底座70。
[0029]
本发明在手掌组件上设置有用于输送内镜的输送组件和用于固定内镜的固定组件;所述的手掌组件10通过腕关节20与前臂30连接。
[0030]
本发明的手掌组件10包括手指组件、手掌组件和手指控制组件。手掌组件为一固定板104;手指组件包括第一指节101、第二指节102、第三指节103。第一指节101和第二指节102转动连接;第二指节102和第三指节103转动连接;第三指节103与固定板104转动连接;手指控制组件用于控制手指组件的指节弯曲或者伸直。
[0031]
本发明的固定板104以及所有的指节都是有硬质的板体或者管状体外包裹一定厚度的橡胶外套构成的,防止对内镜造成损伤。
[0032]
优选的,本发明所有与内镜接触的部位均套上厚厚的橡胶套。
[0033]
本发明的手指控制组件包括气筒105、推动杆107、连杆一109和连杆二110;所述的第二指节102和第三指节103结构相同均为中空的筒状结构;所述的第二指节102和第三指节103内以及固定板104上均设置有密闭的气筒105;所述的气筒105内设置有活塞体106;所述活塞体106的前端设置推动杆107;所述推动杆107的前端伸出气筒105与一移动块111连接;连杆一109的后端与移动块111转动连接,前端与连杆二110的后端转动连接,所述连杆二110的前端与位于起前端的指节一侧固定连接;所述气筒105通过气管108与供气组件连接。
[0034]
本发明的手掌控制组件能够控制手掌摊平,或者处于握拳状态,供气组件供气,气筒内的气压推挤推动杆107,推动杆107向前推动移动块111,移动块111驱动连杆一109和连杆二110,将位于连杆二110前端的指节转动90度。
[0035]
本发明的输送组件包括设置于食指和无名指的第一指节和第三指节上的输送环81;所述的输送环81套设在所述的第一指节和第三指节外周,并且通过旋转组件绕指节外周转动;食指和无名指的第一指节和第三指节外周设置有导向滑槽82;输送环81内侧设置有与导向滑槽82匹配的导向滑块83;所述的旋转组件包括设置于指节外侧的驱动齿轮84;所述的输送环81上设置有与驱动齿轮啮合的齿环85;所述的驱动齿轮84由驱动电机驱动。
[0036]
优选的输送环81外侧设置有弧形凹槽86;所述的弧形凹槽86内设置有防滑橡胶垫87;所述的防滑橡胶垫87与弧形凹槽86之间设置有多个伸缩弹簧88。
[0037]
本发明将消化内镜放置到手指第三指节内侧的位置,手指控制组件控制手指弯曲,第一指节和第三指节几乎平行,消化内镜位于第一指节和第三指节之间的输送环81,输送环通过驱动齿轮84驱动绕手指指节转动,第一指节和第三指节的输送环81会夹紧内镜的两侧,控制其前进或者后退。
[0038]
固定组件包括设置于中指第一指节上的第一弧形夹片91和第三指节上的第二弧形夹片92;所述的第一弧形夹片91和第二弧形夹片92内设置有减压垫93;所述的第一弧形夹片91和第二弧形夹片92分别固定在伸缩气缸一94和伸缩气缸二95上;所述的伸缩气缸一
94和伸缩气缸二95分别安装于中指第一指节和第三指节上。
[0039]
手指控制组件控制指节弯曲,第一指节和第三指节几乎平行,第一指节和第三指节上设置有第一弧形夹片91和第二弧形夹片92,当伸缩气缸一94和伸缩气缸二95控制第一弧形夹片91和第二弧形夹片92收缩,第一弧形夹片91和第二弧形夹片92的两侧与消化内镜侧边之间有间隙,消化内镜可以前后滑动,输送组件可以带动消化内镜前后移动,当内镜不需要移动时,伸缩气缸一94和伸缩气缸二95控制第一弧形夹片91和第二弧形夹片92伸出,第一弧形夹片91和第二弧形夹片92夹紧,消化内镜固定,无法移动。
[0040]
将消化内镜放置于手掌部位,手指控制组件工作,使得第二指节与第一指节垂直,第三指节与第二指节垂直,这样第一指节和第三指节平行,指节上设置有输送组件和固定组件,用于控制内镜前进或者后退,或者固定加持内镜。
[0041]
腕关节20用于将手掌组件10上抬或者下压或者使手掌组件10前进或者后退;前臂30通过肘关节40与上臂50连接;肘关节40用于控制前臂30左旋或者右旋;上臂50通过肩关节60与底座70连接;肩关节60控制上臂50摆动。
[0042]
本发明的腕关节20包括上部活动板21和下部固定板22;手掌组件10的固定板104与上部活动板21固定连接;下部固定板22与前臂30的固定连接;所述的上部活动板21与一提升板23滑动连接;且上部活动板21由横移驱动组件驱动其横向往复移动;所述提升板23通过升降组件驱动其上下往复移动。腕关节20通过上部活动板21横向移动以及提升板23上下移动,可以控制手掌组件移动至合适的位置,握持内镜,并且可以对内镜的位置进行微调。
[0043]
本发明的肘关节40包括下部固定座41和上部旋转座42;所述的上部旋转座42与所述的下部固定座41转动连接;所述的下部固定座41与上臂50固定连接;所述的上部旋转座42与所述的前臂30固定连接;所述的下部固定座41设置有驱动上部旋转座42转动的旋转平台43。
[0044]
本发明的肘关节40实现左、右旋转的关节功能。
[0045]
本发明的肩关节60包括连接臂一61、连接臂二62、支撑臂一63和支撑臂二64;所述底座70上固定设置有支撑臂一63和支撑臂二64;连接轴65的两端与支撑臂一63和支撑臂二64固定连接;所述连接臂一61、连接臂二62的上端与上臂50固定连接,下端与连接轴65转动连接;所述的连接轴65上设置有驱动齿轮二66;所述上臂50下方设置有与齿轮二66啮合的弧形齿条67;连接轴65由旋转电机驱动。
[0046]
本发明的肩关节可以配合手部动作进行旋转调整。
[0047]
本发明还设置有语音控制模块,所述的语音控制模块包括语音预输入模块、音频匹配模块和控制中心;所述的控制中心与手掌组件10、腕关节20、前臂30、肘关节40、上臂50和肩关节60连接,用于控制这些部位的活动;所述的语音预输入模块包括声音传感器一,用于采集操作者的语音信息,将语音信息转换成声音波形进行存储至存储器内;所述的音频匹配模块包括声音传感器二和对比模块,声音传感器二采集语音信息,将该信息发送至对比模块,对比模块将语音信息转换成声音波形后与存储器内的声音波形进行比较,若匹配,则将采集的信息发送至控制中心,控制中心根据接收的语音指令信息判断,选择控制手掌组件10、腕关节20、前臂30、肘关节40、上臂50或肩关节60动作。
[0048]
本技术可以通过语音模块精确控制各部位移动的距离,转动的角度。本发明手掌
组件10通过输送组件输送环旋转的周数转换成前进或者后退的距离,控制中控接收到内镜所需前进和后退的距离后,将其转换成输送环的运动周数,控制中心精准控制。
[0049]
根据接收到的语音信息,控制腕关节20上提和下降的距离,以及前进和后退的额距离,并且控制肘关节40和肩关节60精确转动。
[0050]
本发明的底座70内设置有容纳空间;容纳空间内设置有升降座;上臂50通过肩关节60与升降座连接;升降座通过升降组件安装于容纳空间内;上臂50包括臂体51和顶部翻板52;顶部翻板52的一侧与臂体51铰接连接,另一侧通过牵引绳53与臂体51内的收放线组件54连接;肘关节40固定安装于翻板52上表面;翻板52的下表面设置有定位座55;所述定位座55的两侧设置有定位槽56;臂体51顶部设置有与定位座55匹配的定位腔;定位腔的两侧设置有定位卡块58;定位卡块58由固定安装于定位腔侧壁的定位气缸驱动。
[0051]
本发明可以将手掌组件10、腕关节20、前臂30、肘关节40、上臂50、肩关节60全部收纳至底座内,一方面节约空间,另一方面对手掌部件以及各个关节部位具有很好的防护作用,防止意外损坏。
[0052]
升降座上升,将肩关节和手臂以及手掌等均推送出底座外,辅助手臂使用结束后,收放线组件54放线(手动辅助手臂转动),顶部翻板52翻转,将上臂折叠后,升降座下降座底座底部。
[0053]
使用时收放线组件54收线,拉紧,前臂被拉起后,定位气缸驱动定位卡快58卡接在定位座55的定位腔内,即可。
[0054]
本发明采用内镜医生辅助手臂控制内镜的方法,具体包括如下步骤:1)首先将内镜放置于手掌组件第三指节的输送组件的输送环侧壁的凹槽内;手掌组件工作,手指弯曲,使第一指节和第三指节平行,第一指节和第三指节的输送环夹持内镜的两侧;固定组件固定内镜;2)通过腕关节、肘关节和肩关节,调整内镜的位置,使内镜处于合适的位置;3)在内镜将检查过程中,固定组件不工作,利用输送组件输送内镜;4)工作结束后输送组件反向工作,收回内镜。
[0055]
以上所述,仅是本发明的较佳实施例而已,不用于限制本发明,本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1