脑梗患者康复训练用具
1.本发明涉及脑梗患者康复技术领域,特别是一种脑梗患者康复训练用具。
背景技术:
2.脑梗又称为脑梗塞,脑梗塞特点是患侧肢体的肌张力增高,其原因使脑损伤以后脑细胞脑神经功能失去了对肢体肌肉的控制能力,进而肌张力就增高,其中,上肢症状表现为手臂蜷缩,手指内扣,屈伸不利,脑梗塞后积极进行上肢康复训练可以有效防止关节挛缩,促进肌张力降低,促进肌肉功能恢复,促进上肢功能恢复,少留或者不留后遗症。
3.目前,脑梗塞患者初期的功能性康复训练以被动训练为主,其训练内容多为患侧手指及手臂的屈伸,以及患侧关节的转动,由于脑梗塞患者初期身体较为羸弱,患者用健侧肢体辅助患侧肢体进行锻炼时,不仅易因体力不支而导致训练中断,而且健侧肢体也很难有足够的力量带动患侧肢体进行有效的锻炼,进而自主锻炼效果不佳。
4.若医护人员辅助患者进行康复训练,虽然锻炼效果较好,但由于训练时需要帮助患者手指及手臂不断地屈伸,也需要帮助患者患肢关节不断地转动,辅助患者进行锻炼不仅耗费较多的时间与体力,严重降低其舒适度,而且由于辅助患者训练时间较长,不仅占用了较多的护理医资力量,给本就不充沛的护理医资力量雪上加霜,进而使得每个患者等待护理的周期较长,易消磨患者的精力与耐心,也易使部分患者不能及时得到护理。
技术实现要素:
5.针对上述情况,为克服现有技术之缺陷,本发明之目的就是提供一种脑梗患者康复训练用具,有效的解决了患者自主锻炼效果不佳及辅助训练占用医资力量较多的问题。
6.其解决的技术方案是,本发明包括左右方向的底板,底板上端左侧设有箱体,箱体内滑动连接有左右方向的倒l形杆,倒l形杆上转动连接有转杆,转杆右端贯穿箱体且设有转盘,转盘上偏心转动连接有连接轴,连接轴右端设有倒l形的壳体,壳体右侧设有固定带,壳体内设有上下方向的顶板,顶板后端设有弹性带,箱体左侧转动连接有左右轴向的转轴,转轴上同轴开设有螺旋槽,倒l形杆左侧下端设有插入螺旋槽内的滑柱,转杆左侧与转轴同轴滑动连接,箱体内设有位于倒l形杆前方且可左右移动的滑板,滑板上开设有l形槽,倒l形杆下侧滑动连接有前后轴向且轴向截面为十字形的拨杆,拨杆前侧与l形槽滑动连接;
7.所述的箱体内设有位于滑板前方且可左右移动的移动板,移动板上开设有左低右高的斜槽,拨杆前端与斜槽滑动连接,箱体内滑动连接有气箱,气箱上端经压簧与箱体连接,气箱内滑动连接有t形的活塞板,活塞板下端贯穿气箱且设有左右方向的推板,拨杆后端与推板下端面接触,顶板前侧设有l形的气囊,气箱右上侧经连管与气囊下侧连通。
8.本发明构思新颖,结构巧妙,操作方便,实用性强,既可以使患者的肩关节、肘关节及指关节得到有效的训练,也减少了对医资力量的占有量。
附图说明
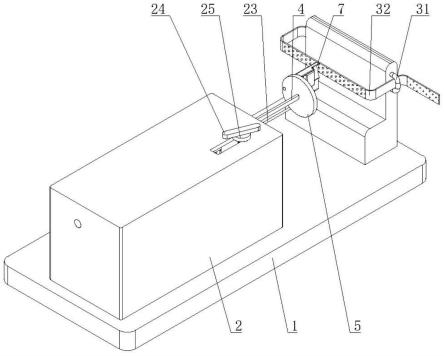
9.图1是本发明的轴测图。
10.图2是本发明的去掉箱体的轴测图。
11.图3是本发明箱体的全剖主视轴测图。
12.图4是本发明箱体的局部剖切主视轴测图。
13.图5是本发明图4中a的放大图。
14.图6是本发明图4中b的放大图。
15.图7是本发明箱体的剖切主视轴测图。
16.图8是本发明的全剖俯视图。
17.图9是本发明箱体的剖切左视轴测图。
18.图10是本发明的全剖俯视轴测图。
19.图11是本发明图10中c的放大图。
20.图12是本发明的壳体右视轴测图。
具体实施方式
21.以下结合附图对本发明的具体实施方式作进一步详细说明。
22.由图1至图12给出,包括左右方向的底板1,底板1上端左侧设有箱体2,箱体2内滑动连接有左右方向的倒l形杆3,倒l形杆3上转动连接有转杆4,转杆4右端贯穿箱体2且设有转盘5,转盘5上偏心转动连接有连接轴6,连接轴6右端设有倒l形的壳体7,壳体7右侧设有固定带8,壳体7内设有上下方向的顶板9,顶板9后端设有弹性带10,箱体2左侧转动连接有左右轴向的转轴11,转轴11上同轴开设有螺旋槽12,倒l形杆3左侧下端设有插入螺旋槽12内的滑柱13,转杆4左侧与转轴11同轴滑动连接,箱体2内设有位于倒l形杆3前方且可左右移动的滑板14,滑板14上开设有l形槽15,倒l形杆3下侧滑动连接有前后轴向且轴向截面为十字形的拨杆16,拨杆16前侧与l形槽15滑动连接;
23.所述的箱体2内设有位于滑板14前方且可左右移动的移动板17,移动板17上开设有左低右高的斜槽18,拨杆16前端与斜槽18滑动连接,箱体2内滑动连接有气箱19,气箱19上端经压簧与箱体2连接,气箱19内滑动连接有t形的活塞板20,活塞板20下端贯穿气箱19且设有左右方向的推板21,拨杆16后端与推板21下端面接触,顶板9前侧设有l形的气囊22,气箱19右上侧经连管23与气囊22下侧连通。
24.为了使滑板14可左右移动,所述的箱体2上侧壁上开设有上下贯通且左右方向的通槽,滑板14上螺纹连接有上端穿过通槽的t形螺杆24,t形螺杆24上设有可与箱体2接触的抵块25,滑板14与箱体2滑动连接。
25.为了使移动板17可左右移动,所述的箱体2内设有前后轴向的电机26,电机26输出端同轴设有圆盘27,圆盘27前端经连杆28与移动板17左侧铰接连接,移动板17与箱体2滑动连接。
26.为了便于活塞板20的移动,所述的活塞板20上端经弹簧与气箱19连接。
27.为了避免气囊22充气过程中气箱19移动,所述的气箱19右侧壁上开设有开口朝右的插槽,箱体2右侧壁上滑动连接有左右方向的滑杆29,滑杆29左端设有倒l形的限位杆30,限位杆30左端可插入插槽内,限位杆30下端面为左高右低的倾斜面,推板21右端可与限位
杆30下端面接触,滑杆29上套装有位于箱体2与限位杆30之间的弹簧。
28.为了限制患者的位置,所述的底板1上端右侧设有前后方向且倒l形的座椅,座椅前端设有固定环31,座椅后端设有约束带32,约束带32自由端可经魔术贴与其后侧粘合。
29.为了便于固定固定带8,所述的固定带8后侧面上设有魔术母贴33,固定带8自由端设有可与魔术母贴33粘合的魔术子贴34。
30.为了达到更好的使用效果,所述的壳体7右侧前表面为弧口朝前的弧形面,箱体2材料为透明材料,推板21可与气箱19接触。
31.本发明在使用时,初始状态为抵块25与箱体2接触,拨杆16前端位于斜槽18左侧的极限位置,约束带32脱离固定环31,魔术子贴34脱离魔术母贴33,设置压簧的弹力大于推板21与气箱19接触时活塞板20上方弹簧的弹力,若患者右上肢为患肢,则患者坐在座椅前侧,若患者左上肢为患肢,则患者坐在座椅后侧,患者坐在座椅上后,陪护人员向前拉动约束带32,使约束带32依次从患者腋下及身前绕过,当约束带32绕过固定环31后,向后拉动约束带32,当约束带32绷紧后,按压约束带32,约束带32自由端经魔术贴与其后侧粘合,此时,完成了对患者上身位置的限制;
32.限制患者上身后,向左拉动患者患肢,帮助患者除拇指外的四指穿过弹性带10与顶板9之间的缝隙,当患者手掌掌心朝向顶板9且拇指与顶板9右端接触时,拉动固定带8,通过魔术子贴34及魔术母贴33将患者下臂靠近手腕处约束在壳体7上,此时,松开患者手指,由于患者肌张力较高,患者拇指在肌张力的作用下扣在气囊22前侧,患者其余四指在肌张力作用下扣合在气囊22左侧及气囊22左前侧,此时,完成了对患者患肢的约束;
33.患者患肢被约束后,逆时针转动t形螺杆24,t形螺杆24带动抵块25逆时针转动同时带动抵块25向上移动,抵块25下端脱离箱体2,此时,向左拉动患者患肢,患者患肢经固定带8、壳体7推动连接轴6向左移动,连接轴6经圆盘27、转杆4带动倒l形杆3向左移动,转杆4相对于转轴11向左移动,倒l形杆3带动滑柱13向左移动,滑柱13经螺旋槽12推动转轴11顺时针转动,转轴11经转杆4带动转盘5顺时针转动,转盘5经连接轴6、壳体7带动患者手腕顺时针圆周运动,同时,倒l形杆3推动拨杆16向左移动,拨杆16经斜槽18推动移动板17向左移动,移动板17经连杆28带动圆盘27顺时针转动;
34.随着患者患肢的向左移动,壳体7经连接轴6、圆盘27、转杆4带动倒l形杆3不断向左移动,倒l形杆3经拨杆16带动移动板17不断向左移动,移动板17经连杆28带动圆盘27顺时针转动,同时,倒l形杆3经滑柱13带动转轴11不断顺时针转动,转轴11经转杆4、圆盘27、连接轴6、壳体7带动患者患肢不断顺时针圆周运动,即患者患肢向左移动的同时不断做顺时针圆周运动,患者肩关节在顺时针转动的同时手臂逐渐伸直,当拨杆16与l形槽15左侧壁接触时,拨杆16经l形槽15推动滑板14向左移动,直至患者手臂伸直;
35.患者手臂伸之后,一手拉住患者手臂,使其处于伸直状态,另一手向右拉动t形螺杆24,t形螺杆24带动滑板14向右移动,当l形槽15左侧壁与拨杆16接触时,顺时针转动t形螺杆24,t形螺杆24带动抵块25转动同时带动抵块25同步向下移动,当抵块25接触并挤压箱体2时,停止转动t形螺杆24,此时,滑板14的位置被限制,启动电机26并松开患者患肢,电机26带动圆盘27顺时针转动,圆盘27经连杆28带动移动板17向左移动,移动板17推动拨杆16向上移动,同时拨杆16相对于斜槽18向上移动;
36.拨杆16向上移动过程中,倒l形杆3停止移动,转轴11、转杆4、转盘5、连接轴6及壳
体7停止转动,即患者患肢处于伸直的状态,同时,拨杆16推动推板21向上移动,推板21推动活塞板20向上移动,活塞板20将其上侧的气体压入连管23内,气体经连管23进入气囊22内,气囊22逐渐充盈,随着圆盘27的继续转动,活塞板20继续向上移动,气囊22的逐渐充盈,气囊22前侧推动患者拇指向前移动,气囊22左侧推动患者其余四指逐渐张开;
37.当推板21与限位杆30接触时,推板21推动限位杆30向右移动,同时,推板21继续经活塞板20推动气体进入连管23、气囊22内,随着推板21的向上移动,患者手指被撑开至伸展状态,当推板21与限位杆30下端面接触时,随着推板21的向上移动,推板21推动限位杆30向右移动,限位杆30推动滑杆29向右移动,滑杆29上套装的弹簧被压缩,当推板21右端与限位杆30下侧左表面接触时,限位杆30脱离插槽,此时,气箱19在压簧弹力作用下向下移动,活塞板20相对于气箱19向上移动,气囊22继续充盈,直至气箱19与推板21接触;
38.推板21与气箱19接触时,随着圆盘27的继续转动,拨杆16经推板21推动气箱19向上移动,压簧继续被压缩,患者手指处于伸展状态,当圆盘27轴心与连杆28共线时,随着圆盘27的继续转动,圆盘27经连杆28带动移动板17向右移动,移动板17经斜槽18推动拨杆16向下移动,气箱19在压簧压力作用下带动推板21同步向下移动,当推板21脱离限位杆30下侧左表面时,限位杆30在其右侧的弹簧弹力作用下向左移动,直至限位杆30左端与气箱19接触;
39.随着气箱19的不断向下移动,当限位杆30左端脱离气箱19右表面时,限位杆30左端在弹簧弹力作用下插入插槽内,此时,随着圆盘27的继续转动,拨杆16继续向下移动,活塞板20在其上侧弹簧弹力作用下向下移动,活塞板20上方空间增大,气压减小,气囊22内的气体经连管23进入活塞板20上方,患者手指在肌张力的作用下逐渐扣合,随着推板21的不断向下移动,气囊22内气体逐渐减小,患者手指继续扣合,直至恢复至初始状态,此时,拨杆16与l形槽15下侧壁接触;
40.拨杆16与l形槽15下侧壁接触后,随着圆盘27的继续转动,移动板17带动拨杆16向右移动,拨杆16带动倒l形板向右移动,倒l形板带动滑柱13、转杆4同步向右移动,转杆4经转盘5、连接轴6、壳体7带动患者患肢向右移动,同时,滑柱13经螺旋槽12带动转轴11逆时针转动,转轴11经转杆4、转盘5、连接轴6、壳体7带动患者患肢逆时针圆周运动,随着圆盘27的继续转动,患者患肢向右移动的同时不断做逆时针圆周运动,患者肩关节在逆时针转动的同时手臂逐渐弯曲,直至圆盘27恢复至初始位置;
41.电机26运行期间,拨杆16向左移动过程中,壳体7经固定带8带动患者患肢向左移动,患者手臂逐渐伸直,同时,壳体7经患者手臂带动患者肩关节做顺时针转动,拨杆16向上移动过程中,患者手指被撑开并保持撑开状态,拨杆16向下移动过程中,患者手指先保持一段时间的撑开状态,然后手指逐渐扣合,拨杆16向右移动过程中,壳体7经固定带8带动患者患肢向右移动,患者手臂逐渐弯曲,同时,壳体7经患者手臂带动患者肩关节做逆时针转动,即患者既做了肩关节顺逆时针转动的往复运动训练,也做了肘部屈伸的往复运动训练,同时也做了手指的屈伸的往复运动训练;
42.训练结束后,关闭电机26,拉动约束带32,使魔术子贴34脱离魔术母贴33,拉动固定带8,解除对患者手腕的约束即可。
43.本发明中设置箱体2材料为透明材料,目的是便于观察箱体2的内部,以便于对滑板14的位置进行准确的约束,本发明中使连接轴6与转盘5转动连接,目的是为了使壳体7可
以绕连接轴6自由转动,以避免患者手臂转动过程中手臂被扭伤的现象。
44.本发明构思新颖,结构巧妙,操作方便,实用性强,设置可左右移动且可转动的壳体及可间歇充气的气囊,既使肩关节进行了顺逆时针的往复运动训练,也使肘关节进行了屈伸的往复运动训练,同时也是手指做了屈伸的往复运动训练,不仅可以使患者的肩关节、肘关节及指关节得到有效的训练,有效防止关节挛缩,促进肌张力降低,促进肌肉功能恢复,促进上肢功能恢复,也减少了对医资力量的占有量,降低了医护人员的工作量,增加其舒适度,减少了患者等待护理的周期时长,使得患者能够及时得到应有的护理,增加患者的满意度。
45.可见,利用本发明所提供的脑梗患者康复训练用具,可以有效解决的患者锻炼效果不佳及占用医资力量较多的问题,此结构操作简单,使用方便,增加了患者的康复速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1