一种遥控行走的病毒气溶胶消杀机器人的制作方法
1.本发明涉及医疗器械技术领域,特别的,是一种遥控行走的病毒气溶胶消杀机器人。
背景技术:
2.生物气溶胶,通常是指空气动力学直径在100μm以内的含有微生物或来源于生物性物质的气溶胶,生物气溶胶颗粒包括病毒、细菌、真菌、等,生物气溶胶在传染病、公共卫生、大气环境、食品安全、生态环境、气候变化、生物反恐、疾病检测以及环境与健康等方面均有重要影响,现有的遥控行走的病毒气溶胶消杀机器人一般借助螺杆带动消毒灯在胶圈内升降,改变消毒灯自身发出脉冲紫外光的消杀范围,由于消毒灯为圆盘状的立边结构,当消毒灯被上升的螺杆加速甩动时,将会利用自身立边结构平行回勾在螺杆末端,对其施加同向牵引力,增加螺杆的离心力,使得螺杆会逐渐侧倾依靠在其外沿的胶圈上,容易出现头重脚轻的情况,导致螺杆会一边按压卷带着胶圈上表面,一边撬动胶圈的内圆周,容易造成螺杆难以继续竖向转动延伸出胶圈,让消毒灯失去平行甩动能力,从而缩小消毒灯的消杀范围,增加该机器人的消杀难度。
技术实现要素:
3.针对上述问题,本发明提供一种遥控行走的病毒气溶胶消杀机器人,其结构包括连杆、按钮、主机、消杀模块、行走底座,所述连杆连接在主机上,所述主机通过按钮与行走底座之间采用电性连接的方式相配合,且设有消杀模块,所述消杀模块包括胶圈、螺杆、消毒灯、助力体、网兜,所述胶圈和网兜连接在主机上,且胶圈上通过助力体与螺杆过渡配合,所述螺杆转动配合在消毒灯下。
4.作为本发明的进一步改进,所述助力体包括支腿、纠偏装置、绑带、鼓囊、牵扯结构,所述支腿通过牵扯结构连接在鼓囊上,且活动卡合在胶圈和网兜内,所述鼓囊通过绑带安装有纠偏装置,且间隙配合在胶圈内。
5.作为本发明的进一步改进,所述鼓囊为通过支腿和纠偏装置转动配合在胶圈和网兜上,有助于鼓囊转动维护能力。。
6.作为本发明的进一步改进,所述纠偏装置包括托片、衔接件、拢翼、顺压把、挂钩、咬合扣,所述托片连接在顺压把上,且间隙配合在螺杆上,所述顺压把通过拢翼连接在挂钩上,所述挂钩之间连接有咬合扣,所述咬合扣通过衔接件滑动配合在绑带上。
7.作为本发明的进一步改进,所述衔接件包括滚条、延伸柄、滑轨、收爪、压舌,所述滚条连接在滑轨一端,所述滑轨另一端连接有延伸柄,且通过收爪和压舌连接在绑带上,所述延伸柄间隙配合在咬合扣上。
8.作为本发明的进一步改进,所述滑轨滑动配合在咬合扣上,且具有一定弧度,便于借力于鼓囊上。
9.作为本发明的进一步改进,所述牵扯结构包括弯钩、推翻件、斜板、转轴、插块、套
环,所述弯钩连接在斜板上,且过渡配合在支腿之间,所述斜板设有两个推翻件,且通过插块滑动配合在套环上,所述套环通过转轴转动配合在支腿上,所述转轴连接在鼓囊上。
10.作为本发明的进一步改进,所述推翻件包括抵触垫、分区夹、突出刃、卡齿、护肘,所述抵触垫通过护肘间隙配合在卡齿上,所述卡齿连接在分区夹一侧,且活动卡合在斜板上,所述分区夹另一侧连接有突出刃,所述突出刃过渡配合在支腿和网兜之。
11.有益效果
12.与现有技术相比,本发明的有益效果:
13.1、本发明在助力体上设有纠偏装置和牵扯结构,利用纠偏装置和牵扯结构在鼓囊上相配合,当螺杆被平行回勾在自身末端的消毒灯所牵扯时,该螺杆的螺纹会先接触到纠偏装置向下按压鼓囊,使得鼓囊堆叠进胶圈,能在支腿受牵扯结构顺势转动下,而以灯笼状包围和承托住螺杆底部,维护螺杆的支撑消毒灯甩动的强度,提高消毒灯的平行放射的稳定性和消杀范围。
14.2、本发明通过挂钩的弧形结构借助衔接件,对鼓囊的球形表面进行递进式纹理整顿,使得鼓囊最终呈灯笼状,堆放在胶圈和网兜上,便于结构之间的螺杆竖向转动的强度。
15.3、本发明由于套环为有一定的宽度的环形结构,其上方的拧纹松紧程度,能够伴随着鼓囊的形变,而改变提供给插块相应的滑动轨迹,进一步有利于弯钩与斜板的相互控制。
附图说明
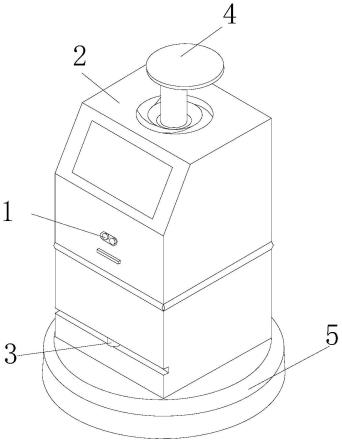
16.图1为本发明一种遥控行走的病毒气溶胶消杀机器人的结构示意图。
17.图2为本发明消杀模块的平面结构示意图。
18.图3为本发明助力体的平面结构示意图。
19.图4为本发明纠偏装置的平面结构示意图。
20.图5为本发明衔接件的平面结构示意图。
21.图6为本发明牵扯结构的俯视结构示意图。
22.图7为本发明推翻件的平面结构示意图。
23.图中:连杆-3、按钮-1、主机-2、消杀模块-4、行走底座-5、胶圈-q5、螺杆-w2、消毒灯-e1、助力体-r3、网兜-t4、支腿-y34、纠偏装置-u33、绑带-i32、鼓囊-o31、牵扯结构-p35、托片-3a3、衔接件-3s2、拢翼-3d1、顺压把-3f4、挂钩-3g6、咬合扣-3h5、滚条-j21、延伸柄-k24、滑轨-l22、收爪-z23、压舌-x25、弯钩-5c3、推翻件-5v2、斜板-5b1、转轴-5m5、插块-5q6、套环-5n4、抵触垫-w24、分区夹-e23、突出刃-r22、卡齿-t21、护肘-y25。
具体实施方式
24.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例1
26.如图1-图3所示,本发明提供一种遥控行走的病毒气溶胶消杀机器人,其结构包括连杆3、按钮1、主机2、消杀模块4、行走底座5,所述连杆3焊接连接在主机2上,所述主机2通过按钮1与行走底座5之间采用电性连接的方式相配合,且顶部设有消杀模块4,所述消杀模
块4包括胶圈q5、螺杆w2、消毒灯e1、助力体r3、网兜t4,所述胶圈q5和网兜t4套接连接在主机2上,且胶圈q5上通过助力体r3与螺杆w2过渡配合,所述螺杆w2转动配合在消毒灯e1下,所述助力体r3包括支腿y34、纠偏装置u33、绑带i32、鼓囊o31、牵扯结构p35,所述支腿y34通过牵扯结构p35铰接连接在鼓囊o31上,且活动卡合在胶圈q5和网兜t4内,所述鼓囊o31通过绑带i32安装有纠偏装置u33,且间隙配合在胶圈q5内,所述鼓囊o31为球形软体结构,通过支腿y34和纠偏装置u33转动配合在胶圈q5和网兜t4上,有助于鼓囊o31转动维护能力,本发明在助力体r3上设有纠偏装置u33和牵扯结构p35,利用纠偏装置u33和牵扯结构p35在鼓囊o31上相配合,当螺杆w2被平行回勾在自身末端的消毒灯e1所牵扯时,该螺杆w2的螺纹会先接触到纠偏装置u33向下按压鼓囊o31,使得鼓囊o31堆叠进胶圈q5,能在支腿y34受牵扯结构p35顺势转动下,而以灯笼状包围和承托住螺杆w2底部,维护螺杆w2的支撑消毒灯e1甩动的强度,提高消毒灯e1的平行放射的稳定性和消杀范围。
27.实施例2
28.如图4-图7所示,在实施例1的基础上,本发明结合以下结构部件的相互配合,所述纠偏装置u33包括托片3a3、衔接件3s2、拢翼3d1、顺压把3f4、挂钩3g6、咬合扣3h5,所述托片3a3铰接连接在顺压把3f4上,且间隙配合在螺杆w2上,所述顺压把3f4通过拢翼3d1固定连接在挂钩3g6上,所述挂钩3g6之间固定连接有咬合扣3h5,所述咬合扣3h5通过衔接件3s2滑动配合在绑带i32上,所述衔接件3s2包括滚条j21、延伸柄k24、滑轨l22、收爪z23、压舌x25,所述滚条j21固定连接在滑轨l22一端,所述滑轨l22另一端铰接连接有延伸柄k24,且通过收爪z23和压舌x25套接连接在绑带i32上,所述延伸柄k24间隙配合在咬合扣3h5上,所述滑轨l22的横截面为v形结构,滑动配合在咬合扣3h5上,且具有一定弧度,便于借力于鼓囊o31上,所述牵扯结构p35包括弯钩5c3、推翻件5v2、斜板5b1、转轴5m5、插块5q6、套环5n4,所述弯钩5c3套接连接在斜板5b1上,且过渡配合在支腿y34之间,所述斜板5b1设有两个推翻件5v2,且通过插块5q6倾斜滑动配合在套环5n4上,所述套环5n4通过转轴5m5转动配合在支腿y34上,所述转轴5m5嵌接连接在鼓囊o31上,所述推翻件5v2包括抵触垫w24、分区夹e23、突出刃r22、卡齿t21、护肘y25,所述抵触垫w24通过护肘y25间隙配合在卡齿t21上,所述卡齿t21固定连接在分区夹e23一侧,且活动卡合在斜板5b1上,所述分区夹e23另一侧焊接连接有突出刃r22,所述突出刃r22过渡配合在支腿y34和网兜t4之间,通过挂钩3g6的弧形结构借助衔接件3s2,对鼓囊o31的球形表面进行递进式纹理整顿,使得鼓囊o31最终呈灯笼状,堆放在胶圈q5和网兜t4上,便于结构之间的螺杆w2竖向转动的强度,由于套环5n4为有一定的宽度的环形结构,其上方的拧纹松紧程度,能够伴随着鼓囊o31的形变,而改变提供给插块5q6相应的滑动轨迹,进一步有利于弯钩5c3与斜板5b1的相互控制。
29.下面对上述技术方案中的一种遥控行走的病毒气溶胶消杀机器人的工作原理作如下说明:
30.本发明在使用过程中,当消毒灯e1被上升的螺杆w2加速甩动时,为防止螺杆w2立边结构回勾至螺杆w2上时,出现头重脚轻的偏斜侧倾情况,因此,在胶圈q5上设有助力体r3,当螺杆w2在胶圈q5内转动时,将会带动鼓囊o31一起螺旋转动,使得鼓囊o31牵引绑带i32同步延伸转动,通过按压滚条j21,进一步贴合在滑轨l22上,使得滑轨l22紧密贴合在绑带i32上,引导延伸柄k24上的收爪z23收缩控制住绑带i32延伸的绷直程度,再借助压舌x25将拉伸的绑带i32的拧转止停在挂钩3g6内的咬合扣3h5上,使得绑带i32以此为分界线,指
引挂钩3g6两侧的拢翼3d1同向带动顺压把3f4一起通过托片3a3环绕着螺杆w2外偏斜,也利用拢翼3d1和顺压把3f4偏转压制着鼓囊o31上部分,改变鼓囊o31的螺旋延伸速度和扒紧在螺杆w2上的层次,在鼓囊o31延伸拉长时,提供给转轴5m5同向离心力,使得转轴5m5转动着从套环5n4内拧转出来,带动着套环5n4同向旋拧,为插块5q6提供倾斜转动的轨迹,有效辅助插块5q6带动斜板5b1在朝鼓囊o31上倾斜,使得突出刃r22逐渐在鼓囊o31上平展和反向按压在分区夹e23上,使得分区夹e23的交叉重合位置靠近在卡齿t21上,加强对护肘y25在斜板5b1内对抵触垫w24的压缩程度,改变抵触垫w24的支撑能力,能顺利整顿梳理鼓囊o31上的褶皱纹理,确保鼓囊o31呈灯笼状借助支腿y34在胶圈q5和网兜t4上密集绑紧在螺杆w2上,控制螺杆w2任何程度上在胶圈q5上的直立转动程度,避免支撑消毒灯e1转动时出现头重脚轻的侧倾情况,降低该机器人的消杀难度。
31.在本发明的描述中,需要理解的是,术语“中心”、“侧向”、“长度”、“宽度”、“高度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“侧”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1