一种数据驱动的人工肩关节假体疲劳寿命预测方法
1.本发明涉及人工智能技术领域,尤其涉及一种数据驱动的人工肩关节假体疲劳寿命预测方法。
背景技术:
2.骨骼是人体的重要组织,是支持人体各项活动的基础,而关节是连接骨骼的重要结构。我们在生活生产中,做各种灵活、精确的动作,这些都离不开关节的协调。如果关节系统受到侵损,使关节功能受损,严重影响患者的正常生活和生产。肩关节严重的伤病在临床上很常见,包括肱骨近端粉碎性骨折、晚期肩关节炎、肱骨头坏死、缺损、肩袖关节病等。这些疾病引起的肩关节疼痛和活动受限,给患者的生活带来影响。目前临床上常规的治疗效果不佳,应运而生的办法便是人工关节置换,人工关节置换术是通过手术用一个与原关节功能近似的人工关节来替代受到侵损的生理关节,使关节功能全部恢复或部分恢复。肩关节置换是一种有效手段,对缓解肩关节疼痛、改善关节功能发挥着重要的作用。
3.由于肩关节是人体内活动范围最大、结构最复杂的关节,肩关节置换术较为复杂,对假体的生物力学行为有特殊要求。研究肩关节生物力学常用的方法有标本实验、活体实验、理论方法和有限元方法,实验方法可以测量结构间接触压力,但是组织结构内部压力难以测量。标本实验的缺点是人体组织不易获得,需要进行申报且对实验条件要求苛刻,而活体实验具有侵入性、创伤性和一定的危险性,且可能有伦理问题。理论方法通过经典力学进行研究,将肩关节模型和简化为理想的机械关节,估算动态运动过程中肌肉和关节的力量大小。随着计算机的发展,有限元分析也被应用在生物力学的研究中,通过计算机计算,可同时获得各组织结构内部应力分布、形变数据,且计算效率高。
4.现代肩关节假体临床疗效稳步提高,目前肩关节假体已经形成了由肱骨头、肱骨柄和肩盂杯组成的模块化设计,但是假体松动依然是肩关节置换术中一个重要的临床问题,其中最大原因是假体的疲劳破坏。由于髋关节发展较早,对髋关节人工假体的力学性能测试或者有限元分析的研究也相对较多,应用断裂力学方法估算了注塑制成的由短碳纤维增强聚醚醚酮的一种尺寸的股骨柄假体的寿命。外科植入物髋关节假体疲劳试验标准中定义的负荷是否正确地模拟了体内发生的生理负荷。通过实验和有限元分析结合的方式对三种尺寸的人工股骨柄进行了疲劳寿命的研究。这些研究对人工肩关节假体的疲劳性能研究具有重要意义。肩关节假体疲劳性能研究指出了肱骨头和关节盂相互作用力的范围为人体自身体重1.3-2.4倍(930-1720n),对应疲劳试验的加载力设定为930-1720n。同时研究认为肩关节置换后患者上肢用力小于正常状态,每天高强度的使用上肢大约为25次,假设假体正常使用约10年,置换后患者高强度使用约1
×
105次。根据肩关节假体疲劳性能测试标准、髋关节假体疲劳性能测试标准,制定了人工肩关节假体的疲劳性能测试的试验方案,将疲劳寿命提高为了2
×
105次,并对国产的威高个体化人工肩关节假体进行了疲劳试验。
5.值得注意的是,上述都只采用实验的方式对假体的疲劳性能进行离散的研究,并没有对系列化参数组件组成的假体进行疲劳性能的研究,并且大多研究者都是骨外科医
生,他们的专业在医学和解剖学上,对于工程学、力学等知识可能储备不足。在有限元仿真时,需要使用到的软件很多,对于复杂的问题甚至前处理、求解器和后处理都要使用特定的软件,工作量大,导致学习难度增加。
技术实现要素:
6.本发明的目的在于提供一种数据驱动的人工肩关节假体疲劳寿命预测方法,旨在解决现有的疲劳性能实验在有限元仿真时学习难度大的问题。
7.为实现上述目的,本发明提供了一种数据驱动的人工肩关节假体疲劳寿命预测方法,包括以下步骤:
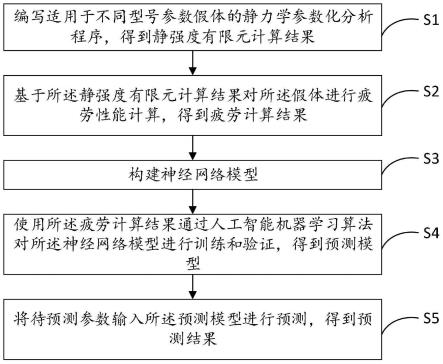
8.编写适用于不同型号参数假体的静力学参数化分析程序,得到静强度有限元计算结果;
9.基于所述静强度有限元计算结果对所述假体进行疲劳性能计算,得到疲劳计算结果;
10.构建神经网络模型;
11.使用所述疲劳计算结果通过人工智能机器学习算法对所述神经网络模型进行训练和验证,得到预测模型;
12.将待预测参数输入所述预测模型进行预测,得到预测结果。
13.其中,所述编写适用于不同型号参数假体的静力学参数化分析程序,得到静强度有限元计算结果的具体方式为:
14.建立参数化三维模型;
15.编程对假体的材料属性、分析类型、部件相互作用和边界条件,完成参数化分析程序;
16.运行所述参数化分析程序计算得到静强度有限元计算结果。
17.其中,所述基于所述静强度有限元计算结果对所述假体进行疲劳性能计算,得到疲劳计算结果的具体方式为:
18.通过拉丁超立方抽样对所述分析参数进行矩阵抽取,得到抽样矩阵;
19.对所述抽取矩阵的每一行进行参数样本分析,得到样本分析结果;
20.对所述样本分析结果进行静强度分析,得到静强度分析结果;
21.使用疲劳算法对所述静强度分析结果进行疲劳分析,得到疲劳计算结果。
22.其中,所述神经网络模型包括1个输入层、1个隐层和输出层,并使用激活函数为所述输出层的输出添加非线性。
23.其中,所述使用所述疲劳计算结果通过人工智能机器学习算法对所述神经网络模型进行训练和验证,得到预测模型的具体方式为:
24.将所述计算结果导出为矩阵形式,得到输入矩阵;
25.设置所述神经网络模型的模型参数、学习率和迭代次数后,使用所述输入矩阵通过人工智能机器学习算法对所述神经网络模型进行训练和验证,得到预测模型。
26.本发明的一种数据驱动的人工肩关节假体疲劳寿命预测方法,通过对假体的型号参数进行参数化分析,得到分析参数;基于所述分析参数对所述假体进行疲劳寿命计算,得到计算结果;构建神经网络模型;使用所述计算结果通过人工智能机器学习算法对所述神
经网络模型进行训练,得到预测模型;将待预测参数输入所述预测模型进行预测,得到预测结果,本发明通过参数优化分析将有限元计算过程固化,形成一套标准流程。即使是骨科医生或其他非专业人员,只需修改少量参数即可完成不同型号产品的计算,解决了现有的疲劳性能实验在有限元仿真时学习难度大的问题。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
28.图1是参数化分析的模型建立、离散化以及计算过程图。
29.图2是关节假体6个外形的几何参数图。
30.图3是仿真分析流程自动化和多学科多目标优化工具的结构示意图。
31.图4是主要的参数传递过程图。
32.图5是计算结果表格图。
33.图6是预测安全系数值fos的部分数据集截图。
34.图7是神经网络模型的示意图。
35.图8是relu函数的函数图像。
36.图9是本发明提供一种数据驱动的人工肩关节假体疲劳寿命预测方法的流程图。
具体实施方式
37.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
38.请参阅图1至图9,本发明提供一种数据驱动的人工肩关节假体疲劳寿命预测方法,包括以下步骤:
39.s1编写适用于不同型号参数假体的静力学参数化分析程序,得到静强度有限元计算结果;
40.具体方式为:
41.s11建立参数化三维模型;
42.具体的,参数化分析的模型建立、离散化以及计算过程,参数变化根据实际假体的设计,载荷范围与人体自重相关,全都由编程完成修改,修改传参即可对不同规格进行分析。
43.s12编程对假体的材料属性、分析类型(静强度)、部件相互作用和边界条件,完成参数化分析程序。
44.具体的,参数化建模程序的入口主函数main(l1,l2,r1,height,radius,bias,weight),函数需要传递的参数有7个,其中6个外形的几何参数在图上已标出,对应关系为:l2为肱骨柄总长度,l1为圆弧段长度,r1为肱骨柄半径,height为肱骨头高度,radius为肱骨头半径,bias是一个布尔类型的值,用于确定肱骨头是正心肱骨头还是偏心肱骨头,剩下
一个参数weight为人体自重,用于计算载荷值。
45.s13运行所述参数化分析程序计算得到静强度有限元计算结果。
46.s2基于所述静强度有限元计算结果对所述假体进行疲劳性能计算,得到疲劳计算结果;
47.isight是一个仿真分析流程自动化和多学科多目标优化工具,它提供了一个可视化的灵活的仿真流程平台,同时提供与多种主流cae分析工具的对接接口。
48.本发明所搭建的isight流程如图所示,包含一个doe组件,一个matlab组件以及一个fesafe组件。
49.具体方式为:
50.s21通过拉丁超立方抽样对所述分析参数进行矩阵抽取,得到抽样矩阵;
51.具体的,在isight通过doe定义7维参数,对应参数化建模程序的7个传入参数,然后设置各参数变化范围,确定参数组数量后,通过拉丁超立方抽样形成一个7
×
n的矩阵。
52.doe的参数传入matlab,matlab会做两件事,一件是将doe定义好的参数矩阵中用于分析的这一行写入一个文本文件(par.txt);第二件事是通过内置函数启动abaqus文件,并让abaqus运行上面所说的参数化程序,参数化程序已经编写好运行时会读取上述的对应文本文件。
53.doe组件意思为designofexperiments,也就是设计实验,在此主要是设计参数,除了用户可以自行输入参数外,也可以通过设置抽样算法,如拉丁超立方抽样在设计空间中选取足以包含所有参数情况的样本进行分析。
54.s22对所述抽取矩阵的每一行进行参数样本分析,得到样本分析结果;
55.s23对所述样本分析结果进行静强度分析,得到静强度分析结果;
56.具体的,matlab的作用为调用abaqus仿真软件进行静强度分析,因为参数化分析的程序是通过二次开发编写的,isight自有的解析能力不能对参数化分析程序进行解读,需要通过matlab组件将doe的参数打包再传入abaqus的参数化分析程序。
57.s24使用疲劳算法对所述静强度分析结果进行疲劳分析,得到疲劳计算结果。
58.具体的,通过fesafe进行疲劳分析,fesafe是一款高级疲劳耐久性分析和信号处理的软件,可设计材料属性参数和设置循环载荷谱。计算结果如图所示,所有规格型号均满足寿命要求(20万次),fos均大于1,图中结果为若大于100万次无破坏即不显示疲劳寿命。
59.名词解释:
60.par[]是一个数组,其维度对应参数组的维度,需要与参数化分析程序的传入参数个数对应;
[0061]
静力学odb是abaqus进行静强度分析后的结果,传入fesafe后进行疲劳仿真;
[0062]
life-repeats为循环次数,也就是疲劳寿命;
[0063]
fos为疲劳强度因子,可理解为安全系数;
[0064]
s3构建神经网络模型;
[0065]
具体的,所述神经网络模型包括1个输入层、1个隐层和输出层,并使用激活函数为所述输出层的输出添加非线性。1个输入层包括7个神经元。
[0066]
s4使用所述疲劳计算结果通过人工智能机器学习算法对所述神经网络模型进行训练和验证,得到预测模型;
[0067]
计算结果作为训练数据集,通过人工智能、机器学习算法,训练出适合肩关节假体疲劳寿命预测的预测模型,对于后续新规格的疲劳寿命计算,只需要传入到预测模型,即可得到对应的结果。
[0068]
具体方式为:
[0069]
s41将所述计算结果导出为矩阵形式,得到输入矩阵;
[0070]
具体的,将上述的自动化仿真结果(计算结果)文件导出为*.csv文件,如下图所示为预测安全系数值fos的部分数据集截图,a列为序号,b~h为对应的7维参数,i列为fos结果,通过numpy(python的一种开源的数值计算扩展,支持大量的维度数组与矩阵运算,此外也针对数组运算提供大量的数学函数库),将其读入后转化为矩阵形式。
[0071]
s42设置所述神经网络模型的模型参数、学习率和迭代次数后,使用所述输入矩阵通过人工智能机器学习算法对所述神经网络模型进行训练和验证,得到预测模型。
[0072]
本文用到的算法模型为神经网络,需要设计层数和激活函数,如下图所示,神经网络可分为输入层、隐层和输出层,由于输入参数有7个,因此输入层n取7,输出结果可根据实际设置,如只是考虑安全系数fos,输出层取1,隐藏层属于超参数,可以通过多次尝试最终确定隐藏层中n的最佳值。
[0073]
激活函数用于给神经网络的输出添加非线性,本发明使用到relu函数,函数图像如图所示,其中小于0的部分被抑制为0,保留大于0部分。
[0074]
模型参数设置好之后设置学习率和迭代次数,用于调节模型收敛的速度,当训练结束后即可对新参数组的结果进行预测。
[0075]
s5将待预测参数输入所述预测模型进行预测,得到预测结果。
[0076]
有益效果
[0077]
1.缩短医疗器械取证周期。举例:验证200个髋关节假体的疲劳寿命,实验验证在40台试验机同时工作的条件下需要60天完成,而有限元计算只需要一台高性能计算机就可以在12天内完成,时间缩短80%,且目前有限元结果已经被药监局认可,可作为医疗产品取证的佐证资料。
[0078]
2.降低医疗器械有限元仿真的门槛,医工结合已成为医疗器械开发的重要趋势,但是有限元仿真的入门门槛高,需要一定的理论支撑,而临床医生或骨科医生因为专业不对口,对医疗器械进行有限元仿真验证依然存在一定的困难,若将重复枯燥的有限元操作流程进行固化,通过编程编写函数传参实现参数化分析即可简化有限元仿真过程。本发明将肩关节假体的静强度分析通过参数化分析封装,通过修改函数传参对不同规格型号(规格型号即参数)假体进行静强度分析,为疲劳仿真做好铺垫。
[0079]
3.通过自动仿真可实现一次设置实现大批量疲劳仿真,通过软件调用平台耦合静强度分析软件以及疲劳仿真软件,只需确定参数的传递方向以及不同软件的输入输出文件之间的传递,降低疲劳仿真的难度以及节省不同软件之间调用文件的操作时间。
[0080]
4.自动仿真进行不同规格型号的假体的仿真分析后,数据量已经初具规模,利用这些数据,结合现在流行的人工智能算法即可探索数据中的规律,为后续新规格型号的假体疲劳寿命进行预测,既可以在设计阶段发现产品的问题,也可在临床上为骨科医生选择不同规格型号假体时给出指导意见。
[0081]
以上所揭露的仅为本发明一种数据驱动的人工肩关节假体疲劳寿命预测方法较
佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1