一种机械手臂精确预备牙齿尺寸的设备及其方法与流程
1.本发明涉及医疗器械技术领域,尤其涉及一种机械手臂精确预备牙齿尺寸的设备及其方法。
背景技术:
2.现有技术现在医生自己操作临床,由于每个医生的技术水平不等,医生对牙齿认知不同,而达不到标准的预备要求,或者误差比较大,每个医生的操难以保持一致和标准化,因此也限制了备牙的精度和备牙的稳定性,因此出现了机械手代替人工的方案,但是现有的机械手在使用后通常外漏放置,容易造成交叉污染,不利于对机械手的消杀。
3.为此,我们提出一种机械手臂精确预备牙齿尺寸的设备及其方法。
技术实现要素:
4.本发明主要是解决上述现有技术所存在的技术问题,提供一种机械手臂精确预备牙齿尺寸的设备及其方法。
5.为了实现上述目的,本发明采用了如下技术方案,一种机械手臂精确预备牙齿尺寸的设备及其方法,包括收集箱、机械手本体、支架、触摸控制屏、扫描头、和防护板,所述机械手本体活动安装在收集箱内,触摸控制屏与支架活动连接,扫描头与触摸控制屏电信号连接,触摸控制屏的壳体部分转动连接防护板,防护板可翻转将触摸控制屏遮挡,机械手本体与触摸控制屏电信号连接,所述收集箱内设置消杀机构,所述消杀机构包括连接板、多节升降电缸、伸缩杆、紫外线灯管、存储筒、输送管道、导流盘和输液通道,所述多节升降电缸与收集箱固定连接且多节升降电缸的输出端与连接板固定连接,机械手本体活动安装在连接板顶面,伸缩杆与收集箱固定连接且伸缩杆的输出端与连接板固定连接,紫外线灯管与收集箱拆卸连接,存储筒与收集箱固定连接,导流盘与收集箱固定连接,导流盘的顶面开设输液通道,导流盘具有空腔且导流盘通过输送管道与存储筒连通,存储筒内设置有水泵且水泵的输出端口与输送管道固定连接。
6.作为上述方案的进一步限定,所述收集箱为内部中空的圆筒,多节升降电缸和伸缩杆的壳体部分均与收集箱内底面固定连接,多节升降电缸和伸缩杆对称设置,收集箱内壁面设置至少四个紫外线灯管,紫外线灯管两两相互对称分布。
7.作为上述方案的进一步限定,所述存储筒的顶面开设螺纹孔,螺纹孔通过螺栓封堵,输送管道为l形管,输送管道的竖直部分贯穿存储筒的底面并延伸至存储筒内,导流盘为环形板,导流盘的内部中空,所述输液通道的上端面开设两列输液通道。
8.作为上述方案的进一步限定,所述输送管道的水平部分端口贯穿导流盘的圆周面,导流盘上端面的两列输液通道均倾斜设置,两列输液通道的分布轨迹均呈环形,两列输液通道的倾斜方向逆向设置。
9.作为上述方案的进一步限定,所述消杀机构还包括第一环板、围板、安装杆和卡箍,所述围板与第一环板固定连接,围板与收集箱内底面转动连接,安装杆与第一环板固定
连接,卡箍与安装杆固定连接,紫外线灯管与卡箍卡接。
10.作为上述方案的进一步限定,所述第一环板和围板均为环形板,围板的内径与第一环板的外径相等,第一环板和围板共同组成一个横向截面呈凸字的组合环,第一环板和围板组成的复合环不与输液通道干涉,第一环板贯穿收集箱的底面并延伸至收集箱外,第一环板位于收集箱外的圆周面开设齿牙,收集箱的底面固定连接有驱动电机,电机的输出轴设置有齿轮且该齿轮与第一环板的齿牙啮合。
11.作为上述方案的进一步限定,所述消杀机构还包括橡胶垫和凸起,所述橡胶垫与卡箍固定连接,凸起与橡胶垫固定连接,卡箍为水平截面呈c形的金属板,卡箍具有弹性,橡胶垫与卡箍的内壁面固定连接,紫外线灯管通过卡箍的弹性夹击橡胶垫固定。
12.作为上述方案的进一步限定,所述消杀机构还包括盖板、销轴和永磁体,所述销轴穿过盖板且销轴与收集箱的上端面转动连接,永磁体内嵌于收集箱的上端面,盖板的底面设置相同的永磁体且两个永磁体异性的磁极相对设置,收集箱的顶面设置两个相同的盖板将收集箱的开口封堵。
13.有益效果
14.本发明提供了一种机械手臂精确预备牙齿尺寸的设备及其方法。具备以下有益效果:
15.(1)、该一种机械手臂精确预备牙齿尺寸的设备及其方法,相对现有技术按照医生肉眼判断,本方案通过机械手本体代替人工备牙,精确更高,稳定性更强,通过将多节升降电缸、紫外线灯管以及存储筒内的水泵与触摸控制屏电信号连接,在多节升降电缸的输出轴回收带动连接板下降时,存储筒内的水泵以及紫外线灯管通电工作,在机械手本体收入收集箱腔内时,通过紫外线灯管对机械手本体的进行消杀处理,同时,通过将存储筒内的消毒液或者酒精输入输送管道内再通过导流盘的各个输液通道喷洒,实现对机械手本体的双重消杀作业,便于在使用机械手本体后的维护和消毒,防止机械手本体反复使用交叉污染。
16.(2)、该一种机械手臂精确预备牙齿尺寸的设备及其方法,通过液体从两列倾斜方向相反的输液通道喷出,两列输液通道喷出的消毒液相互冲击形成圆筒状的消毒雾化带将下降的机械手本体包围,增强对机械手本体的消杀效果,同时,在对机械手本体消杀过程中,将机械手本体包裹在雾化带内,避免机械手本体表面的细菌污染收集箱内壁面,更有利与对机械手本体的无菌保存。
17.(3)、该一种机械手臂精确预备牙齿尺寸的设备及其方法,收集箱的外底面设置游丝,紫外线灯管的接线端子与收集箱底面的游丝电连接,收集箱的底面还设置带有球阀的排污管,通过电机与触摸控制屏电信号连接,电机驱动第一环板和围板旋转,通过第一环板的圆周运动带动各个安装杆上安装的紫外线灯管旋转,通过旋转的多个紫外线灯管对机械手本体进行消杀,增强紫外线灯管对机械手本体的照射面,同时,多个紫外线灯管在旋转过程中也能促进收集箱腔内的气体流动,使得消毒液和气体混合物均匀混合并与触摸控制屏接触,进一步提高对机械手本体的消杀效果。
18.(4)、该一种机械手臂精确预备牙齿尺寸的设备及其方法,通过将紫外线灯管从卡箍的开口推入卡箍内,通过卡箍的弹力给橡胶垫施加夹击力,配合多个凸起将紫外线灯管夹紧,便于拆装紫外线灯管和后期对紫外线灯管进行维保。
19.(5)、该一种机械手臂精确预备牙齿尺寸的设备及其方法,通过两个异形磁极的永
磁体相互吸引使得盖板保持与收集箱上端面紧密贴合状态,有利于保持收集箱腔内相对密封的环境,在对机械手本体消杀后,避免外界污染物进入收集箱内,同时,通过两个翻转的安装杆可充当置物台,放置客户资料,功能性更强。
附图说明
20.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义。
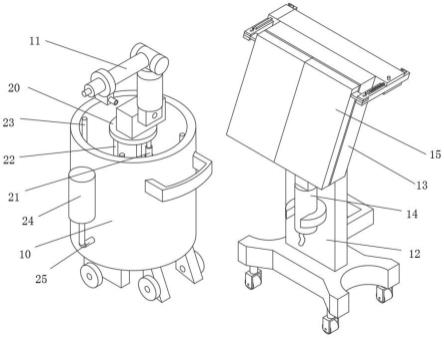
21.图1为本发明立体图;
22.图2为发明导流盘和第一环板立体图;
23.图3为发明图2中a的放大图;
24.图4为发明盖板将收集箱密封示意图;
25.图5为本发明盖板与收集箱安装示意图。
26.图例说明:
27.10、收集箱;11、机械手本体;12、支架;13、触摸控制屏;14、扫描头;15、防护板;20、连接板;21、多节升降电缸;22、伸缩杆;23、紫外线灯管;24、存储筒;25、输送管道;26、导流盘;27、输液通道;28、第一环板;29、围板;30、安装杆;31、卡箍;32、橡胶垫;33、凸起;40、盖板;41、销轴;42、永磁体。
具体实施方式
28.一种机械手臂精确预备牙齿尺寸的设备及其方法,如图1-图2所示,包括收集箱10、机械手本体11、支架12、触摸控制屏13、扫描头14、和防护板15,机械手本体11活动安装在收集箱10内,触摸控制屏13与支架12活动连接,扫描头14与触摸控制屏13电信号连接,触摸控制屏13的壳体部分转动连接防护板15,防护板15可翻转将触摸控制屏13遮挡,机械手本体11与触摸控制屏13电信号连接,收集箱10内设置消杀机构,消杀机构包括连接板20、多节升降电缸21、伸缩杆22、紫外线灯管23、存储筒24、输送管道25、导流盘26和输液通道27,多节升降电缸21与收集箱10固定连接且多节升降电缸21的输出端与连接板20固定连接,机械手本体11活动安装在连接板20顶面,伸缩杆22与收集箱10固定连接且伸缩杆22的输出端与连接板20固定连接,紫外线灯管23与收集箱10拆卸连接,存储筒24与收集箱10固定连接,导流盘26与收集箱10固定连接,导流盘26的顶面开设输液通道27,导流盘26具有空腔且导流盘26通过输送管道25与存储筒24连通,存储筒24内设置有水泵且水泵的输出端口与输送管道25固定连接,收集箱10为内部中空的圆筒,多节升降电缸21和伸缩杆22的壳体部分均与收集箱10内底面固定连接,多节升降电缸21和伸缩杆22对称设置,收集箱10内壁面设置至少四个紫外线灯管23,紫外线灯管23两两相互对称分布,存储筒24的顶面开设螺纹孔,螺纹孔通过螺栓封堵,输送管道25为l形管,输送管道25的竖直部分贯穿存储筒24的底面并延伸至存储筒24内,导流盘26为环形板,导流盘26的内部中空,输液通道27的上端面开设两列输液通道27,输送管道25的水平部分端口贯穿导流盘26的圆周面,导流盘26上端面的两列输液通道27均倾斜设置,两列输液通道27的分布轨迹均呈环形,两列输液通道27的倾斜方向逆向设置,相对现有技术按照医生肉眼判断,本方案通过机械手本体代替人工备牙,精确
更高,稳定性更强,通过将多节升降电缸21、紫外线灯管23以及存储筒24内的水泵与触摸控制屏13电信号连接,在多节升降电缸21的输出轴回收带动连接板20下降时,存储筒24内的水泵以及紫外线灯管23通电工作,在机械手本体11收入收集箱10腔内时,通过紫外线灯管23对机械手本体11的进行消杀处理,同时,通过将存储筒24内的消毒液或者酒精输入输送管道25内再通过导流盘26的各个输液通道27喷洒,实现对机械手本体11的双重消杀作业,便于在使用机械手本体11后的维护和消毒,防止机械手本体11反复使用交叉污染。
29.通过液体从两列倾斜方向相反的输液通道27喷出,两列输液通道27喷出的消毒液相互冲击形成圆筒状的消毒雾化带将下降的机械手本体11包围,增强对机械手本体11的消杀效果,同时,在对机械手本体11消杀过程中,将机械手本体11包裹在雾化带内,避免机械手本体11表面的细菌污染收集箱10内壁面,更有利与对机械手本体11的无菌保存。
30.一种机械手臂精确预备牙齿尺寸的设备及其方法,如图2-图3所示,消杀机构还包括第一环板28、围板29、安装杆30和卡箍31,围板29与第一环板28固定连接,围板29与收集箱10内底面转动连接,安装杆30与第一环板28固定连接,卡箍31与安装杆30固定连接,紫外线灯管23与卡箍31卡接,第一环板28和围板29均为环形板,围板29的内径与第一环板28的外径相等,第一环板28和围板29共同组成一个横向截面呈凸字的组合环,第一环板28和围板29组成的复合环不与输液通道27干涉,第一环板28贯穿收集箱10的底面并延伸至收集箱10外,第一环板28位于收集箱10外的圆周面开设齿牙,收集箱10的底面固定连接有驱动电机,电机的输出轴设置有齿轮且该齿轮与第一环板28的齿牙啮合,消杀机构还包括橡胶垫32和凸起33,橡胶垫32与卡箍31固定连接,凸起33与橡胶垫32固定连接,卡箍31为水平截面呈c形的金属板,卡箍31具有弹性,橡胶垫32与卡箍31的内壁面固定连接,紫外线灯管23通过卡箍31的弹性夹击橡胶垫32固定,收集箱10的外底面设置游丝,紫外线灯管23的接线端子与收集箱10底面的游丝电连接,收集箱10的底面还设置带有球阀的排污管,通过电机与触摸控制屏13电信号连接,电机驱动第一环板28和围板29旋转,通过第一环板28的圆周运动带动各个安装杆30上安装的紫外线灯管23旋转,通过旋转的多个紫外线灯管23对机械手本体11进行消杀,增强紫外线灯管23对机械手本体11的照射面,同时,多个紫外线灯管23在旋转过程中也能促进收集箱10腔内的气体流动,使得消毒液和气体混合物均匀混合并与触摸控制屏13接触,进一步提高对机械手本体11的消杀效果。
31.通过将紫外线灯管23从卡箍31的开口推入卡箍31内,通过卡箍31的弹力给橡胶垫32施加夹击力,配合多个凸起33将紫外线灯管23夹紧,便于拆装紫外线灯管23和后期对紫外线灯管23进行维保。
32.一种机械手臂精确预备牙齿尺寸的设备及其方法,如图4-图5所示,消杀机构还包括盖板40、销轴41和永磁体42,销轴41穿过盖板40且销轴41与收集箱10的上端面转动连接,永磁体42内嵌于收集箱10的上端面,盖板40的底面设置相同的永磁体42且两个永磁体42异性的磁极相对设置,收集箱10的顶面设置两个相同的盖板40将收集箱10的开口封堵,通过两个可单独旋转的盖板40将收集箱10开口遮挡,通过两个异形磁极的永磁体42相互吸引使得盖板40保持与收集箱10上端面紧密贴合状态,有利于保持收集箱10腔内相对密封的环境,在对机械手本体11消杀后,避免外界污染物进入收集箱10内,同时,通过两个翻转的安装杆30可充当置物台,放置客户资料,功能性更强。
33.本发明的工作原理:
34.第一步:用扫描头14对患者口腔检查和扫描,触摸控制屏13计算设定,牙医确定方案,机械手臂本体11代替牙医操作精确备牙;
35.第二步:两个异形磁极的永磁体42相互吸引使得盖板40保持与收集箱10上端面紧密贴合状态,两个盖板40将收集箱10开口遮挡使得收集箱10保持密封;
36.第三步:多节升降电缸21的输出轴回收带动连接板20下降时,水泵将存储筒24内的消毒液或者酒精输入输送管道25内再通过导流盘26的各个输液通道27喷洒;
37.第四步:电机与触摸控制屏13电信号连接,电机驱动第一环板28和围板29旋转,通过第一环板28的圆周运动带动各个安装杆30上安装的紫外线灯管23旋转;
38.第五步:将紫外线灯管23从卡箍31的开口推入卡箍31内,通过卡箍31的弹力给橡胶垫32施加夹击力,配合多个凸起33将紫外线灯管23夹紧。
39.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1