一种可调节式肠钳
1.本发明涉及医疗器械领域,特别涉及一种可调节式肠钳。
背景技术:
2.肠钳是用于夹持肠管的器械,齿槽薄,弹性好,对组织损伤小,使用时可外套乳胶管,以减少对肠壁的损伤,肠钳是腹腔镜胃肠道手术必需的手术器械,在手术过程中的作用是夹持肠道并拨开影响手术部位的脏器,通常需要一个医生或者手术护士对肠钳进行固定。
3.现有的肠钳在使用时需要医生或呼声手动夹持固定,难以掌握夹持的力度,同时不同位置需要不同长度的肠钳,难以通用,为此,我们提出一种可调节式肠钳。
技术实现要素:
4.本发明的目的在于提供一种可调节式肠钳,克服了现有技术的不足,解决了现有技术中的夹持力度难以掌握、操作难度高、长度难以调节的问题。
5.为解决上述问题,本发明所采取的技术方案如下:
6.一种可调节式肠钳,包括
7.支撑机构,包括支撑杆;
8.调节机构,其设置于支撑机构外,包括设置于支撑杆两侧的调节组件以及设于调节组件一端的驱动组件,调节组件包括分别设于支撑杆两侧的两个螺纹杆以及设于螺纹杆上的调节板;
9.夹持机构,其设置于支撑机构一端,包括设于支撑机构一端的夹持组件以及设于夹持组件上的转动组件,夹持组件包括设于支撑杆一端的第一夹持板以及设于第一夹持板上的若干夹持槽。
10.进一步地,所述的支撑机构还包括设于支撑杆一端的伸缩杆以及安装于支撑杆上的握杆,伸缩杆与支撑杆活动连接,支撑杆上安装有两个按钮。
11.进一步地,所述的调节组件还包括安装于支撑杆两侧的两个滑轨以及分别与两个滑轨活动连接的两个滑道,两个滑道分别安装于两个调节板一侧,滑轨两端均设有限位板,限位板一侧设有通孔,螺纹杆一端穿过通孔与限位板一侧表面活动连接。
12.进一步地,所述的调节组件还包括分别安装于两个调节板一侧的两个调节杆以及设于调节杆另一端的连接板,两个连接板分别安装于伸缩杆两侧。
13.进一步地,所述的驱动组件包括设于支撑杆另一端的连接杆以及设于连接杆另一端的固定架,固定架两端均安装有驱动电机,驱动电机输出端设有第一转动轴,第一转动轴另一端连接于螺纹杆一端。
14.进一步地,所述的夹持组件还包括设于第一夹持板上的第二夹持板,第二夹持板下也设有夹持槽,第一夹持板以及第二夹持板一端均设有防护板。
15.进一步地,所述的转动组件包括设于第一夹持板上的两个竖板以及设于两个竖板
之间的转轴,转轴两端分别与两个竖板活动连接,转轴外还安装有复位弹簧,复位弹簧两端分别设于两个竖板一侧表面。
16.进一步地,所述的转动组件还包括设于竖板一侧的转动电机以及与转动电机输出端相连接的第二转动轴,第二转动轴另一端连接于转轴一端,转轴另一端设有固定板。
17.本发明与现有技术相比较,具有以下有益效果:
18.1、本发明通过驱动组件带动调节组件进行工作,使得肠钳能够自动调节长度,以适应身体不同位置的肠钳使用,增加了肠钳的使用范围,减少了肠钳的数量,有利于降低医疗耗费。
19.2、本发明通过转动组件带动第二夹持板进行转动,然后利用复位弹簧,对中间的肠进行固定夹持,通过对复位弹簧的调节,能够方便的改变夹持力度,防止力度过大,对身体内部造成损坏,极大的降低了操作难度。
附图说明
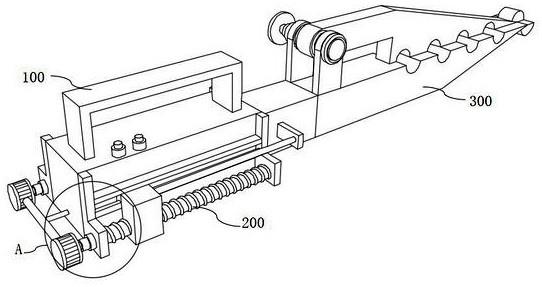
20.图1为本发明的外部整体结构示意图;
21.图2为本发明的正视结构示意图;
22.图3为本发明的俯视结构示意图;
23.图4为图1中a处的局部放大结构示意图;
24.图5为图3中b处的局部放大结构示意图。
25.图中:100-支撑机构;101-支撑杆;102-伸缩杆;103-握杆;104-按钮;200-调节机构;201-螺纹杆;202-调节板;203-滑轨;204-滑道;205-限位板;206-调节杆;207-连接板;208-连接杆;209-固定架;210-驱动电机;211-第一转动轴;300-夹持机构;301-第一夹持板;302-第二夹持板;303-防护板;304-竖板;305-转轴;306-复位弹簧;307-转动电机;308-第二转动轴;309-固定板。
具体实施方式
26.请参照图1至图5所示,一种可调节式肠钳,包括
27.支撑机构100,包括支撑杆101;
28.调节机构200,其设置于支撑机构100外,包括设置于支撑杆101两侧的调节组件以及设于调节组件一端的驱动组件,调节组件包括分别设于支撑杆101两侧的两个螺纹杆201以及设于螺纹杆201上的调节板202;
29.夹持机构300,其设置于支撑机构100一端,包括设于支撑机构100一端的夹持组件以及设于夹持组件上的转动组件,夹持组件包括设于支撑杆101一端的第一夹持板301以及设于第一夹持板301上的若干夹持槽。
30.在手术过程中使用本可调式肠钳时,通过驱动组件带动调节组件进行工作,使得肠钳能够自动调节长度,以适应身体不同位置的肠钳使用,增加了肠钳的使用范围,减少了肠钳的数量,有利于降低医疗耗费,再通过转动组件带动第二夹持板302进行转动,然后利用复位弹簧306,对中间的肠进行固定夹持,通过对复位弹簧306的调节,能够方便的改变夹持力度,防止力度过大,对身体内部造成损坏,极大的降低了操作难度。
31.为了固定肠钳,支撑机构100还包括设于支撑杆101一端的伸缩杆102以及安装于
支撑杆101上的握杆103,伸缩杆102与支撑杆101活动连接,支撑杆101上安装有两个按钮104,两个按钮104分别用来控制驱动电机210以及转动电机307。
32.为了方便调节肠钳的长度,所述的调节组件还包括安装于支撑杆101两侧的两个滑轨203以及分别与两个滑轨203活动连接的两个滑道204,两个滑道204分别安装于两个调节板202一侧,滑轨203两端均设有限位板205,限位板205一侧设有通孔,螺纹杆201一端穿过通孔与限位板205一侧表面活动连接,在螺纹杆201的作用下,其上安装的调节板202内部的螺旋与螺纹杆201相互配合,利用滑轨203与滑道204的相互配合,在螺纹杆201上的移动。
33.为了带动伸缩杆102移动,所述的调节组件还包括分别安装于两个调节板202一侧的两个调节杆206以及设于调节杆206另一端的连接板207,两个连接板207分别安装于伸缩杆102两侧。
34.为了提供调节组件自动调节的动力,所述的驱动组件包括设于支撑杆101另一端的连接杆208以及设于连接杆208另一端的固定架209,固定架209两端均安装有驱动电机210,驱动电机210输出端设有第一转动轴211,第一转动轴211另一端连接于螺纹杆201一端。
35.为了对遮挡视线的肠进行夹持,所述的夹持组件还包括设于第一夹持板301上的第二夹持板302,第二夹持板302下也设有夹持槽,第一夹持板301以及第二夹持板302一端均设有防护板303,防护板303用于防止肠钳头部尖锐部分损坏身体内部结构。
36.为了对第二夹持板302进行抬起,所述的转动组件包括设于第一夹持板301上的两个竖板304以及设于两个竖板304之间的转轴305,转轴305两端分别与两个竖板304活动连接,转轴305外还安装有复位弹簧306,复位弹簧306两端分别设于两个竖板304一侧表面,在第二夹持板302抬起后,关闭转动电机307,在复位弹簧306的作用下与第一夹持板301一起夹持肠。
37.为了提供转动组件需要的动力,所述的转动组件还包括设于竖板304一侧的转动电机307以及与转动电机307输出端相连接的第二转动轴308,第二转动轴308另一端连接于转轴305一端,转轴305另一端设有固定板309。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1