股骨假体的植入装置和电子设备的制作方法
本发明涉及医疗,尤其涉及一种股骨假体的植入装置。
背景技术:
1、髋关节置换术是临床上用于治疗髋部疾病的常用操作,是治疗严重髋关节疼痛、畸形、功能障碍的一种有效的临床术,在国内外得到了广泛的开展。
2、患者在进行髋关节置换术后,容易出现双下肢长度不等的问题。为了避免出现这种问题,通常情况下,术中需要在患者仰卧时触诊股骨远端或踝关节进行下肢长度的手动测量,再结合测量的下肢长度进行股骨假体植入。
3、但是,由于上述方法存在局限性,使得手动测量的下肢长度的准确度较低,这样结合准确度较低的下肢长度进行股骨假体植入,会导致股骨假体植入的准确度较低。
技术实现思路
1、本发明提供一种股骨假体的植入装置,可以基于术中预测的下肢长度和术前规划的预设下肢长度共同控制执行股骨假体的植入操作,从而有效地提高了股骨假体植入的准确度。
2、本发明提供一种股骨假体的植入方法,该股骨假体的植入方法可以包括:
3、根据术中在真实股骨上选择的多个点的位置,和术前基于三维下肢医学图像构建的第一髋关节三维模型,将股骨假体和所述第一髋关节三维模型中的骨盆组合,得到第二髋关节三维模型;
4、对所述第二髋关节三维模型进行股骨旋转处理,得到第三髋关节三维模型;
5、基于所述第三髋关节三维模型预测下肢长度;
6、根据所述下肢长度和术前基于所述第一髋关节三维模型确定的预设下肢长度,控制执行所述股骨假体的植入操作。
7、根据本发明提供的一种股骨假体的植入方法,所述基于所述第三髋关节三维模型预测下肢长度,包括:
8、若所述第一髋关节三维模型为未执行转正操作的髋关节三维模型,则所述第三髋关节三维模型的力线垂直于目标平面,将所述第三髋关节三维模型中小粗隆到所述目标平面之间的距离,确定为所述下肢长度;其中,所述目标平面为经过所述第三髋关节三维模型中左右两侧的髂前上棘点,且与所述三维下肢医学图像的冠状面垂直的平面;
9、或者,
10、若所述第一髋关节三维模型为执行转正操作后的髋关节三维模型,则所述第三髋关节三维模型的力线垂直所述三维下肢医学图像的横断面,将所述第三髋关节三维模型中小粗隆到左右两侧的髂前上棘点所在平面的横断面之间的距离,确定为所述下肢长度。
11、根据本发明提供的一种股骨假体的植入方法,所述第一髋关节三维模型为执行转正操作后的髋关节三维模型,所述方法还包括:
12、对所述三维下肢医学图像进行髋关节分割,并基于分割结果重建髋关节三维模型,得到重建的髋关节三维模型;
13、根据所述重建的髋关节三维模型中左右两侧的髂前上棘点,对所述重建的髋关节三维模型执行转正操作,得到所述第一髋关节三维模型;其中,所述第一髋关节三维模型中左右两侧的髂前上棘点之间的连线平行于所述三维下肢医学图像的x轴,且平行于所述三维下肢医学图像的冠状面;或者,根据所述重建的髋关节三维模型中左右两侧的髂前上棘点和耻骨联合点,对所述重建的髋关节三维模型执行转正操作,得到所述第一髋关节三维模型;其中,所述第一髋关节三维模型中左右两侧的髂前上棘点之间的连线平行于所述三维下肢医学图像的x轴,且所述左右两侧的髂前上棘点和耻骨联合点构成的平面平行于所述三维下肢医学图像的冠状面。
14、根据本发明提供的一种股骨假体的植入方法,所述对所述第二髋关节三维模型进行股骨旋转处理,得到第三髋关节三维模型,包括:
15、若髋臼假体已植入,则根据所述髋臼假体的臼杯旋转中心,内衬沿臼杯法向方向的偏移距离、球头沿臼杯法向方向的偏移距离,确定股骨旋转中心。
16、根据所述股骨旋转中心对所述第二髋关节三维模型进行股骨旋转处理,得到所述第三髋关节三维模型。
17、根据本发明提供的一种股骨假体的植入方法,所述根据所述髋臼假体的臼杯旋转中心,内衬沿臼杯法向方向的偏移距离、球头沿臼杯法向方向的偏移距离,确定股骨旋转中心,包括:
18、根据p=p1+p2+p3确定所述股骨旋转中心。
19、其中,p表示所述股骨旋转中心,p1表示所述臼杯旋转中心,p2表示所述内衬沿臼杯法向方向的偏移距离,p3表示所述球头沿臼杯法向方向的偏移距离。
20、根据本发明提供的一种股骨假体的植入方法,所述根据术中在真实股骨上选择的多个点的位置,和术前基于三维下肢医学图像构建的第一髋关节三维模型,将股骨假体和所述第一髋关节三维模型中的骨盆组合,包括:
21、根据术中在真实股骨上选择的多个点的位置和所述第一髋关节三维模型,确定所述真实股骨到所述第一髋关节三维模型的配准矩阵。
22、根据所述股骨假体在所述真实股骨上的植入位置、植入角度,以及配准矩阵,确定所述股骨假体在第一髋关节三维模型下的植入位置和植入角度。
23、根据所述股骨假体在第一髋关节三维模型下的植入位置和植入角度,将所述股骨假体和所述第一髋关节三维模型中的骨盆组合。
24、根据本发明提供的一种股骨假体的植入方法,所述根据所述下肢长度和术前基于所述第一髋关节三维模型确定的预设下肢长度,控制执行所述股骨假体的植入操作,包括:
25、判断所述下肢长度与所述预设下肢长度的差值是否小于预设阈值。
26、若所述下肢长度与所述预设下肢长度的差值小于或等于预设阈值,则基于术前预设的所述股骨假体的植入位置和植入角度,控制执行所述股骨假体的植入操作。
27、若所述下肢长度与所述预设下肢长度的差值大于预设阈值,则更换术中的股骨假体、植入位置、或者植入角度、球头、内衬中的至少一种;并基于调整后的髋关节三维模型重新预测新的下肢长度,直至重新确定的下肢长度和所述预设下肢长度的差值小于预设阈值,基于小于预设阈值时对应的股骨假体的植入位置和植入角度对应的植入位置和植入角度,控制执行所述股骨假体的植入操作。
28、根据本发明提供的一种股骨假体的植入方法,所述根据术中在真实股骨上选择的多个点的位置和所述第一髋关节三维模型,确定所述真实股骨到所述第一髋关节三维模型的配准矩阵,包括:
29、根据术中在真实股骨上选择的第一预设数量个点的位置,采用刚性配准算法确定真实股骨到所述第一髋关节三维模型的粗配准矩阵。
30、根据所述粗配准矩阵,确定所述真实股骨到所述第一髋关节三维模型的精配准矩阵;其中,所述精配准矩阵为所述配准矩阵。
31、根据本发明提供的一种股骨假体的植入方法,所述根据术中在真实股骨上选择的多个点的位置和所述第一髋关节三维模型,确定所述真实股骨到所述第一髋关节三维模型的配准矩阵,包括:
32、根据术中在真实股骨上选择的第二预设数量个点的位置,采用最近迭代算法,确定所述真实股骨到所述第一髋关节三维模型的精配准矩阵;其中,所述精配准矩阵为所述配准矩阵。
33、根据本发明提供的一种股骨假体的植入方法,若所述第一髋关节三维模型为未执行转正操作的髋关节三维模型,则所述方法还包括:
34、对所述三维下肢医学图像进行髋关节分割,得到分割结果;并基于所述分割结果构建所述第一髋关节三维模型。
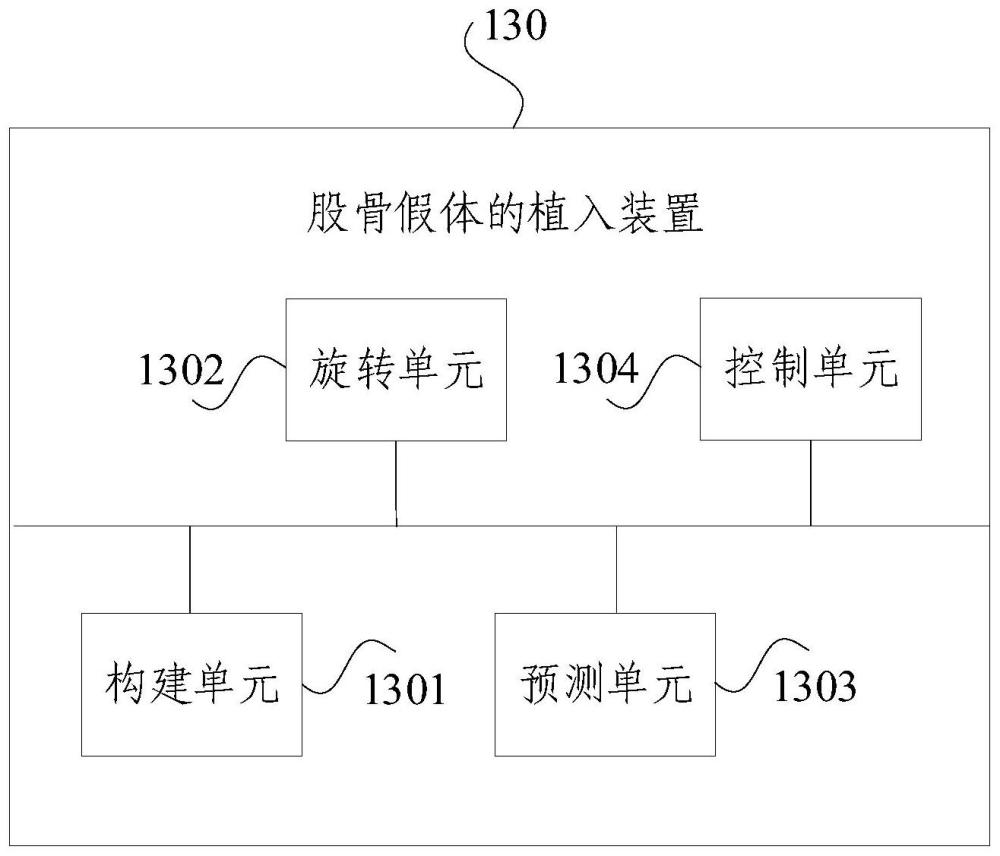
35、本发明提供一种股骨假体的植入装置,该股骨假体的植入装置可以包括:
36、构建单元,用于根据术中在真实股骨上选择的多个点的位置,和术前基于三维下肢医学图像构建的第一髋关节三维模型,将股骨假体和所述第一髋关节三维模型中的骨盆组合,得到第二髋关节三维模型。
37、旋转单元,用于对所述第二髋关节三维模型进行股骨旋转处理,得到第三髋关节三维模型。
38、预测单元,用于基于所述第三髋关节三维模型预测下肢长度。
39、控制单元,用于根据所述下肢长度和术前基于所述第一髋关节三维模型确定的预设下肢长度,控制执行所述股骨假体的植入操作。
40、根据本发明提供的一种股骨假体的植入装置,所述预测单元,具体用于若所述第一髋关节三维模型为未执行转正操作的髋关节三维模型,则所述第三髋关节三维模型的力线垂直目标平面,将所述第三髋关节三维模型中小粗隆到所述目标平面之间的距离,确定为所述下肢长度;其中,所述目标平面为经过所述第三髋关节三维模型中左右两侧的髂前上棘点,且与所述三维下肢医学图像的冠状面垂直的平面;
41、或者,
42、若所述第一髋关节三维模型为执行转正操作后的髋关节三维模型,则所述第三髋关节三维模型的力线垂直所述三维下肢医学图像的横断面,将所述第三髋关节三维模型中小粗隆到左右两侧的髂前上棘点所在平面的横断面之间的距离,确定为所述下肢长度。
43、根据本发明提供的一种股骨假体的植入装置,所述第一髋关节三维模型为执行转正操作后的髋关节三维模型,所述装置还包括重建单元和转正单元。
44、所述重建单元,用于对所述三维下肢医学图像进行髋关节分割,并基于分割结果重建髋关节三维模型,得到重建的髋关节三维模型。
45、所述转正单元,用于根据所述重建的髋关节三维模型中左右两侧的髂前上棘点,对所述重建的髋关节三维模型执行转正操作,得到所述第一髋关节三维模型;其中,所述第一髋关节三维模型中左右两侧的髂前上棘点之间的连线平行于所述三维下肢医学图像的x轴,且平行于所述三维下肢医学图像的冠状面;或者,根据所述重建的髋关节三维模型中左右两侧的髂前上棘点和耻骨联合点,对所述重建的髋关节三维模型执行转正操作,得到所述第一髋关节三维模型;其中,所述第一髋关节三维模型中左右两侧的髂前上棘点之间的连线平行于所述三维下肢医学图像的x轴,且所述左右两侧的髂前上棘点和耻骨联合点构成的平面平行于所述三维下肢医学图像的冠状面。
46、根据本发明提供的一种股骨假体的植入装置,所述旋转单元,具体用于若髋臼假体已植入,则根据所述髋臼假体的臼杯旋转中心,内衬沿臼杯法向方向的偏移距离、球头沿臼杯法向方向的偏移距离,确定股骨旋转中心;根据所述股骨旋转中心对所述第二髋关节三维模型进行股骨旋转处理,得到所述第三髋关节三维模型。
47、根据本发明提供的一种股骨假体的植入装置,所述旋转单元,具体用于根据p=p1+p2+p3确定所述股骨旋转中心。
48、其中,p表示所述股骨旋转中心,p1表示所述臼杯旋转中心,p2表示所述内衬沿臼杯法向方向的偏移距离,p3表示所述球头沿臼杯法向方向的偏移距离。
49、根据本发明提供的一种股骨假体的植入装置,所述构建单元,具体用于根据术中在真实股骨上选择的多个点的位置和所述第一髋关节三维模型,确定所述真实股骨到所述第一髋关节三维模型的配准矩阵;根据所述股骨假体在所述真实股骨上的植入位置、植入角度,以及配准矩阵,确定所述股骨假体在第一髋关节三维模型下的植入位置和植入角度;根据所述股骨假体在第一髋关节三维模型下的植入位置和植入角度,将所述股骨假体和所述第一髋关节三维模型中的骨盆组合。
50、根据本发明提供的一种股骨假体的植入装置,所述控制单元,具体用于判断所述下肢长度与所述预设下肢长度的差值是否小于预设阈值;若所述下肢长度与所述预设下肢长度的差值小于或等于预设阈值,则基于术前预设的所述股骨假体的植入位置和植入角度,控制执行所述股骨假体的植入操作;若所述下肢长度与所述预设下肢长度的差值大于预设阈值,则更换术中的股骨假体、植入位置、或者植入角度、球头、内衬中的至少一种;并基于调整后的髋关节三维模型重新预测新的下肢长度,直至重新确定的下肢长度和所述预设下肢长度的差值小于预设阈值,基于小于预设阈值时对应的股骨假体的植入位置和植入角度对应的植入位置和植入角度,控制执行所述股骨假体的植入操作。
51、根据本发明提供的一种股骨假体的植入装置,所述构建单元,具体用于根据术中在真实股骨上选择的第一预设数量个点的位置,采用刚性配准算法确定真实股骨到所述第一髋关节三维模型的粗配准矩阵;并根据所述粗配准矩阵,确定所述真实股骨到所述第一髋关节三维模型的精配准矩阵;其中,所述精配准矩阵为所述配准矩阵。
52、根据本发明提供的一种股骨假体的植入装置,所述构建单元,具体用于根据术中在真实股骨上选择的第二预设数量个点的位置,采用最近迭代算法,确定所述真实股骨到所述第一髋关节三维模型的精配准矩阵;其中,所述精配准矩阵为所述配准矩阵。
53、根据本发明提供的一种股骨假体的植入装置,若所述第一髋关节三维模型为未执行转正操作的髋关节三维模型,则所述构建单元,还用于:
54、对所述三维下肢医学图像进行髋关节分割,得到分割结果;并基于所述分割结果构建所述第一髋关节三维模型。
55、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的股骨假体的植入方法。
56、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的股骨假体的植入方法。
57、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的股骨假体的植入方法。
58、本发明提供一种股骨假体的植入装置,该植入装置包括:构建单元根据术中在真实股骨上选择的多个点的位置,和术前基于三维下肢医学图像构建的第一髋关节三维模型,将股骨假体和第一髋关节三维模型中的骨盆组合;旋转单元对组合得到的第二髋关节三维模型进行股骨旋转处理,得到第三髋关节三维模型;预测单元基于第三髋关节三维模型预测下肢长度,控制单元根据下肢长度和术前基于第一髋关节三维模型确定的预设下肢长度,控制执行股骨假体的植入操作。这样基于术中的下肢长度和术前规划的预设下肢长度共同控制执行股骨假体的植入操作,提高了股骨假体植入的准确度。
- 还没有人留言评论。精彩留言会获得点赞!