一种全自动智能消毒系统的制作方法
1.本发明涉及公共卫生领域,尤其涉及一种全自动智能消毒系统。
背景技术:
2.随着人们对各种公共场合的环境卫生要求越来越高,对公共场合消毒处理也越来越受到各公众场合管理部门及相关公众的高度重视,但是使用传统人工消毒操作方式进行消毒处理,存在着人工消毒成本高,消毒效率低,消毒不充分,消毒管理难度大,公共环境卫生健康安全隐患大等缺陷问题;并且在某些特殊场合也不适合进行人工消毒,采用人工消毒处理方式有着较大局限性,并且人工消毒处理本身的消毒操作人员本身也可能受到消毒操作过程中的身心健康不利影响。
技术实现要素:
3.本发明意在提供一种全自动智能消毒系统,其能够对目标场合进行全覆盖的消毒,提高消毒的效率以及效果。
4.为达到上述目的,本发明的基本方案如下:
5.一种全自动智能消毒系统,包括:环境采样设备、消毒设备以及后台控制设备,所述消毒设备包括移动式消毒机器人以及固定式消毒设备,所述移动式消毒机器人包括移动式紫外消毒机器人以及移动式雾化消毒机器人,所述固定式消毒设备包括固定式紫外消毒装置以及固定式雾化消毒装置;
6.定义对应于一环境场所的若干场景区域,所述场景区域包括第一场景区域以及第二场景区域,第一场景区域定义为便于移动式消毒设备移动的场景区域,第二场景区域定于为碍于移动式消毒设备移动的场景区域;
7.在第一场景区域内配置移动式紫外消毒机器人以及移动式雾化消毒机器人,在第二场景区域内配置固定式紫外消毒装置以及固定式雾化消毒装置;
8.所述环境采样设备用于采集场景区域内的环境空气中各个毒害物浓度并生成采集数据发送至后台控制设备,所述后台控制设备根据采集数据生成消毒任务,且消毒任务关联有消毒项目;
9.所述后台控制设备分别与移动式消毒设备以及固定式消毒设备通过网络连接,所述移动式消毒设备以及固定式消毒设备接收到来自后台控制设备的消毒任务,并在各自所在的场景区域内执行消毒任务。
10.进一步地,所述第一场景区域内配置有多个消毒模式,所述第一场景区域内的消毒模式包括:
11.移动紫外消毒模式,在此模式下,移动式紫外消毒机器人在第一场景区域内移动并进行紫外消毒;
12.移动雾化消毒模式,在此模式下,移动式雾化消毒机器人在第一场景区域内移动并进行雾化消毒;
13.移动混合消毒模式,在此模式下,移动式紫外消毒机器人以及移动式雾化消毒机器人分别在第一场景区域内移动,并分别进行紫外消毒以及雾化消毒。
14.进一步地,所述第二场景区域内配置有多个消毒模式,所述第二场景区域内的消毒模式包括:
15.固定紫外消毒模式,在此模式下,固定式紫外消毒装置在第二场景区域内并进行紫外消毒;
16.固定雾化消毒模式,在此模式下,固定式雾化消毒装置在第二场景区域内并进行雾化消毒;
17.固定混合消毒模式,在此模式下,固定式紫外消毒装置以及固定式雾化消毒装置在第二场景区域内分别进行紫外消毒以及雾化消毒。
18.进一步地,所述第一场景区域内配置有电梯以及多个自动门,
19.所述电梯配置有电梯控制板,所述电梯控制板连接于后台控制设备,当移动式消毒机器人接收到的消毒项目存在跨楼层消毒时,移动式消毒机器人在当前楼层工作即将结束时,通过后台控制设备向电梯控制板发送呼叫电梯和开关门指令以及到达指定楼层指令,电梯控制板根据接收的各种指令接入电梯按键系统,通过输出电压信号模仿电梯按键,以使电梯在预设时间内到达当前楼层,电梯控制板接收到开关门指令输出开门和关门信号,并根据磁吸传感器的信号判断当前门的状态关门到位、开门中、开门到位、关门中,将当前状态反馈给后台;当电梯到达当前楼层并开门到位后,移动式消毒机器人进入电梯,当电梯关门到位后,电梯根据指令到达指定楼层指令到达指定楼层,当电梯再次开门到位后,移动式消毒机器人进入指定楼层执行消毒任务;
20.所述自动门配置有磁吸传感器以及自动开门器,所述磁吸传感器以及自动门控制板分别连接于后台控制设备,所述磁吸传感器用于检测自动门的开关状态,所述自动门控制板用于控制自动门开合或关闭;
21.所述磁吸传感器连接于移动式消毒机器人,当移动式消毒机器人移动至自动门前,所述移动式消毒机器人向磁吸传感器发起检测请求,磁吸传感器判断当前自动门的状态并生成检测信号反馈至后台控制设备,当检测信号关联的自动门的状态为关门状态时,所述后台控制设备向自动开门器输出开门指令,自动开门器打开自动门,移动式消毒机器人通过自动门进入到自动门内。
22.进一步地,所述移动式消毒机器人配置有定位装置、移动底盘、避障导航单元以及消毒单元,
23.所述定位装置用于获取移动式消毒机器人在第一场景区域内的位置信息;
24.所述移动底盘配置有万向轮,所述移动底盘用于移动式消毒机器人在第一场景区域内移动的移动行进;
25.所述避障导航单元由毫米波雷达以及高清摄像头组成,并用于探测移动式消毒机器人360
°
范围内的障碍物;
26.所述移动式紫外消毒机器人的消毒单元由多个紫外灯组成,并用于在第一场景区域内进行紫外消毒,所述移动式雾化消毒机器人的消毒单元由储液桶和可旋转的雾化喷头组成,储液桶内灌注有消毒液,所述雾化喷头用于在第一场景区域内向多方位喷射雾化消毒液。
27.进一步地,所述移动式消毒机器人在第一场景区域内执行消毒任务包括以下步骤:
28.s1:环境采样设备将第一场景区域的采集数据发送至后台控制设备,后台控制设备根据采集数据生成消毒任务发送至移动式消毒机器人;
29.s2:移动式消毒机器人接收到消毒任务,将定位装置获取的位置信息上传至后台控制设备,后台控制设备根据移动式消毒机器人的位置信息调取第一场景区域的全域地图,并将第一场景区域的全域地图划分为若干个区域块,
30.s3:根据消毒任务关联的消毒项目,在各个区域块内配置消毒点位,并根据消毒点位生成移动式消毒机器人的移动消毒路径,移动底盘根据移动消毒路径移动,消毒单元在移动消毒路径的各个区域块内执行消毒动作。
31.进一步地,所述后台控制设备配置有避障模块,所述避障模块配置有避障策略,所述避障策略关联有图像数据库,所述图像数据库包括若干障碍图块以及障碍图块对应的障碍类;
32.所述高清摄像头采集移动式消毒机器人的移动方向的前部实时场景,并生成待比对图像上传至后台控制设备,当后台控制设备获取待比对图像时,从待比对图像中的提取障碍图块,根据障碍图块识别障碍图块对应的障碍类,根据移动式消毒机器人的位置信息以及障碍类在待比对图像中的位置,所述避障策略重置移动消毒路径。
33.进一步地,所述消毒任务关联有定时消毒项目,所述消毒设备根据消毒任务关联的定时消毒项目生成定时消毒策略,所述定时消毒策略配置有定时消毒方法,所述定时消毒方法包括以下步骤:
34.步骤一,预先设置定时消毒周期、消毒模式以及消毒时长;
35.步骤二,读取上一次保存的消毒结束时间点,并计算当前时间点与上一次保存的消毒结束时间点的时间差,当时间差等于消毒周期时,消毒基本体开启预设的消毒模式;
36.步骤三,当消毒时间达到预设消毒时长时,停止消毒操作。
37.进一步地,所述第一场景区域以及第二场景区域内配置有消毒效果分析仪,所述消毒效果分析仪连接于后台控制设备,所述消毒效果分析仪配置有传感器单元以及辐照检测单元,所述传感器单元用于测量第一场景区域以及第二场景区域内的环境信息,所述环境信息包括消毒液浓度、病毒浓度、浮游细菌浓度以及挥发性有机物浓度,所述辐照检测单元用于检测第一场景区域以及第二场景区域内的紫外辐照强度;
38.所述后台控制设备配置有环境数据处理模块,所述环境数据处理模块配置有环境数据处理策略,所述环境数据处理策略配置有环境质量指数算法,所述环境质量指数算法对应各个毒害物配置有预设权重参数,且每一毒害物对应的预设权重参数不同,所述环境质量指数算法的计算公式为:
39.m=θ{αx+βy+εz};
40.其中,m为环境质量指数,α、β、ε为预设的权重参数,θ为随机参数,取值为0.1-1,x为环境中病毒浓度,y为环境中浮游细菌浓度,z为环境中挥发性有机物浓度;
41.所述随机参数配置有多个影响因子,所述影响因子包括温度、空气流速、pm2.5浓度。
42.进一步地,所述后台控制设备配置有记录模块,所述环境采集模块在一个消毒周
期内在连续的多个预设时间间隔采集环境空气中各个毒害物浓度数据,数据处理模块根据环境质量指数算法得到环境质量指数,所述记录模块记录每个时间点的环境质量指数,并根据环境质量指数以及各个环境质量指数对应的时间点生成环境质量变化曲线,所述环境质量变化曲线表征为时间t0至时间t1时的环境质量指数的变化,t0为消毒周期开始时刻,t1为消毒周期结束时刻;
43.所述后台控制设备配置有分析模块,所述分析模块配置有分析策略,所述分析策略配置有比对阈值,所述分析策略调取t0时刻以及t1时刻的环境质量指数,计算得到t0时刻以及t1时刻的环境质量指数变化率,根据环境质量指数变化率输出消毒效果指数,并记录于记录模块。
44.进一步地,所述消毒设备配置有人体感应单元,所述人体感应单元能够在预设范围内检测到人体的呼吸和心跳,当人体感应单元在预设范围内检测到人体的呼吸和心跳时,所述消毒设备停止消毒动作;
45.所述固定式紫外消毒装置配置有可升降的紫外灯以及自清洁单元,所述自清洁单元配置有用于清洗紫外灯表面灰尘的毛刷,所述毛刷配置有驱动电机。
46.与现有技术相比本方案的有益效果是:
47.1、将待消毒的场景区分为第一场景区域以及第二场景区域,在第一场景区域配置移动式紫外消毒机器人以及移动式雾化消毒机器人,在第二场景区域内配置固定式紫外消毒装置以及固定式雾化消毒装置,后台控制设备根据采集数据生成消毒任务,在第一场景区域以及第二场景区域分别进行全覆盖杀菌消毒,通过移动式消毒机器人以及固定式消毒设备代替了人工消毒,有效提高了消毒的效率以及效果。
48.2、在消毒的过程中,后台控制设备配置的记录模块能够记录每个时间点的环境质量指数,后台控制设备配置的分析模块能够根据一个消毒周期内的环境质量指数变化率,输出消毒效果指数,并记录于记录模块,实现消毒过程的记录分析。
49.3、第一场景区域以及第二场景区域内配置的消毒效果分析仪可以获取环境中的消毒液浓度以及紫外辐照强度,以此判断消毒效果,同时还能将检测到的数据上传至后台控制设备配置的记录模块中。
附图说明
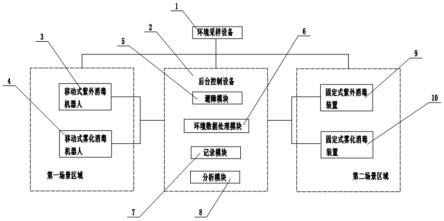
50.图1为本发明的系统结构图。
51.说明书附图中的附图标记包括:环境采样设备1、后台控制设备2、移动式紫外消毒机器人3、移动式雾化消毒机器人4、避障模块5、环境数据处理模块6、记录模块7、分析模块8、固定式紫外消毒装置9、固定式雾化消毒装置10。
具体实施方式
52.下面结合说明书附图,并通过具体实施方式对本发明作进一步详细的说明:
53.实施例:
54.一种全自动智能消毒系统,如图1所示,包括:环境采样设备1、消毒设备以及后台控制设备2,消毒设备包括移动式消毒机器人以及固定式消毒设备,移动式消毒机器人包括移动式紫外消毒机器人3以及移动式雾化消毒机器人4,固定式消毒设备包括固定式紫外消
毒装置9以及固定式雾化消毒装置10,固定式紫外消毒装置9为可升降紫外灯,固定式雾化消毒装置10为壁挂式雾化机;以上四种消毒设备均可手动启动、定时启动或远程启动。
55.消毒设备配置有人体感应单元,人体感应单元能够在预设范围内检测到人体的呼吸和心跳,当人体感应单元在预设范围内检测到人体的呼吸和心跳时,消毒设备停止消毒动作。
56.定义对应于一环境场所的若干场景区域,场景区域包括第一场景区域以及第二场景区域,第一场景区域定义为便于移动式消毒设备移动的场景区域,第二场景区域定于为碍于移动式消毒设备移动的场景区域;
57.在第一场景区域内配置移动式紫外消毒机器人3以及移动式雾化消毒机器人4,在第二场景区域内配置固定式紫外消毒装置9以及固定式雾化消毒装置10;
58.第一场景区域内配置有电梯以及多个自动门,所述电梯配置有电梯控制板,所述电梯控制板通过无线通讯模块连接于后台控制设备2,无线通讯模块可根据现场信号强度可选择4g、wifi、zigbee组网等多种方式,当移动式消毒机器人接收到的消毒项目存在跨楼层消毒时,移动式消毒机器人在当前楼层工作即将结束时,通过后台控制设备向电梯控制板发送呼叫电梯和开关门指令以及到达指定楼层指令,电梯控制板根据接收的各种指令接入电梯按键系统,通过输出电压信号模仿电梯按键,以使电梯在预设时间内到达当前楼层,电梯控制板接收到开关门指令输出开门和关门信号,并根据磁吸传感器的信号判断当前门的状态关门到位、开门中、开门到位、关门中,将当前状态反馈给后台;当电梯到达当前楼层并开门到位后,移动式消毒机器人进入电梯,当电梯关门到位后,电梯根据指令到达指定楼层指令到达指定楼层,当电梯再次开门到位后,移动式消毒机器人进入指定楼层执行消毒任务;
59.所述自动门配置有磁吸传感器以及自动开门器,所述磁吸传感器以及自动门控制板分别连接于后台控制设备,所述磁吸传感器用于检测自动门的开关状态,所述自动门控制板用于控制自动门开合或关闭;
60.所述磁吸传感器连接于移动式消毒机器人,当移动式消毒机器人移动至自动门前,所述移动式消毒机器人向磁吸传感器发起检测请求,磁吸传感器判断当前自动门的状态并生成检测信号反馈至后台控制设备,当检测信号关联的自动门的状态为关门状态时,所述后台控制设备向自动开门器输出开门指令,自动开门器打开自动门,移动式消毒机器人通过自动门进入到自动门内。
61.环境采样设备1用于采集场景区域内的环境空气中各个毒害物浓度并生成采集数据发送至后台控制设备2,后台控制设备2根据采集数据生成消毒任务,且消毒任务关联有消毒项目;
62.后台控制设备2分别与移动式消毒设备以及固定式消毒设备通过网络连接,移动式消毒设备以及固定式消毒设备接收到来自后台控制设备2的消毒任务,并在各自所在的场景区域内执行消毒任务。
63.第一场景区域内配置有多个消毒模式,第一场景区域内的消毒模式包括:
64.移动紫外消毒模式,在此模式下,移动式紫外消毒机器人3在第一场景区域内移动并进行紫外消毒;
65.移动雾化消毒模式,在此模式下,移动式雾化消毒机器人4在第一场景区域内移动
并进行雾化消毒;
66.移动混合消毒模式,在此模式下,移动式紫外消毒机器人3以及移动式雾化消毒机器人4分别在第一场景区域内移动,并分别进行紫外消毒以及雾化消毒;
67.移动式紫外消毒机器人3以及移动式雾化消毒机器人4可以自动上下电梯,可以自动开门,无需人工协助;
68.第二场景区域内配置有多个消毒模式,第二场景区域内的消毒模式包括:
69.固定紫外消毒模式,在此模式下,可升降紫外灯在第二场景区域内并进行紫外消毒,可升降紫外灯配置有自清洁功能,可升降紫外灯配置有人体感应装置,能够实现人来灯灭,避免对紫外灯照射人体皮肤,对人体造成影响;
70.固定雾化消毒模式,在此模式下,壁挂式雾化机在第二场景区域内并进行雾化消毒;
71.固定混合消毒模式,在此模式下,壁挂式雾化机以及可升降紫外灯在第二场景区域内分别进行紫外消毒以及雾化消毒。
72.移动式消毒机器人配置有定位装置、移动底盘、避障导航单元以及消毒单元,
73.定位装置用于获取移动式消毒机器人在第一场景区域内的位置信息;
74.移动底盘配置有万向轮,移动底盘用于移动式消毒机器人在第一场景区域内移动的移动行进;
75.避障导航单元由毫米波雷达以及高清摄像头组成,并用于探测移动式消毒机器人360
°
范围内的障碍物;
76.移动式紫外消毒机器人3的消毒单元由多个紫外灯组成,并用于在第一场景区域内进行紫外消毒,移动式雾化消毒机器人4的消毒单元由储液桶和可旋转的雾化喷头组成,储液桶内灌注有消毒液,雾化喷头用于在第一场景区域内向多方位喷射雾化消毒液。
77.移动式消毒机器人在第一场景区域内执行消毒任务包括以下步骤:
78.s1:环境采样设备1将第一场景区域的采集数据发送至后台控制设备2,后台控制设备2根据采集数据生成消毒任务发送至移动式消毒机器人;
79.s2:移动式消毒机器人接收到消毒任务,将定位装置获取的位置信息上传至后台控制设备2,后台控制设备2根据移动式消毒机器人的位置信息调取第一场景区域的全域地图,并将第一场景区域的全域地图划分为若干个区域块,
80.s3:根据消毒任务关联的消毒项目,在各个区域块内配置消毒点位,并根据消毒点位生成移动式消毒机器人的移动消毒路径,移动底盘根据移动消毒路径移动,消毒单元在移动消毒路径的各个区域块内执行消毒动作。
81.后台控制设备2配置有避障模块5,避障模块5配置有避障策略,避障策略关联有图像数据库,图像数据库包括若干障碍图块以及障碍图块对应的障碍类;
82.高清摄像头采集移动式消毒机器人的移动方向的前部实时场景,并生成待比对图像上传至后台控制设备2,当后台控制设备2获取待比对图像时,从待比对图像中的提取障碍图块,根据障碍图块识别障碍图块对应的障碍类,根据移动式消毒机器人的位置信息以及障碍类在待比对图像中的位置,避障策略重置移动消毒路径。
83.消毒任务关联有定时消毒项目,消毒设备根据消毒任务关联的定时消毒项目生成定时消毒策略,定时消毒策略配置有定时消毒方法,定时消毒方法包括以下步骤:
84.步骤一,预先设置定时消毒周期、消毒模式以及消毒时长;
85.步骤二,读取上一次保存的消毒结束时间点,并计算当前时间点与上一次保存的消毒结束时间点的时间差,当时间差等于消毒周期时,消毒基本体开启预设的消毒模式;
86.步骤三,当消毒时间达到预设消毒时长时,停止消毒操作。
87.第一场景区域以及第二场景区域内配置有消毒效果分析仪,消毒效果分析仪连接于后台控制设备,消毒效果分析仪配置有传感器单元以及辐照检测单元,传感器单元用于测量第一场景区域以及第二场景区域内的环境信息,环境信息包括消毒液浓度、病毒浓度、浮游细菌浓度以及挥发性有机物浓度,辐照检测单元用于检测第一场景区域以及第二场景区域内的紫外辐照强度;
88.后台控制设备2配置有环境数据处理模块6,环境数据处理模块6配置有环境数据处理策略,环境数据处理策略配置有环境质量指数算法,环境质量指数算法对应各个毒害物配置有预设权重参数,且每一毒害物对应的预设权重参数不同,环境质量指数算法的计算公式为:
89.m=θ{αx+βy+εz};
90.其中,m为环境质量指数,α、β、ε为预设的权重参数,θ为随机参数,取值为0.1-1,x为环境中病毒浓度,y为环境中浮游细菌浓度,z为环境中挥发性有机物浓度;
91.随机参数配置有多个影响因子,影响因子包括温度、空气流速、pm2.5浓度。
92.后台控制设备2配置有记录模块7,环境采集模块在一个消毒周期内在连续的多个预设时间间隔采集环境空气中各个毒害物浓度数据,数据处理模块根据环境质量指数算法得到环境质量指数,记录模块7记录每个时间点的环境质量指数,并根据环境质量指数以及各个环境质量指数对应的时间点生成环境质量变化曲线,环境质量变化曲线表征为时间t0至时间t1时的环境质量指数的变化,t0为消毒周期开始时刻,t1为消毒周期结束时刻;
93.后台控制设备2配置有分析模块8,分析模块8配置有分析策略,分析策略配置有比对阈值,分析策略调取t0时刻以及t1时刻的环境质量指数,计算得到t0时刻以及t1时刻的环境质量指数变化率,根据环境质量指数变化率输出消毒效果指数,并记录于记录模块7。
94.在第一场景区域以及第二场景区域配置消毒效果分析仪,消毒效果分析仪连接于后台控制设备2,可通过消毒效果分析仪监测出消毒液喷洒浓度和紫外灯辐照强度,以此判断消毒效果合格,并上传数据到后台控制设备2的记录模块7。
95.本方案具体实施方式如下:
96.在待消毒的场景中配置移动式紫外消毒机器人3、移动式雾化消毒机器人4、壁挂式雾化机、可升降紫外灯四种消毒设备,
97.环境采样设备1将分别将第一场景区域以及第二场景区域的采集数据发送至后台控制设备2,后台控制设备2根据采集数据分别生成消毒任务,发送至移动式消毒机器人以及固定式消毒设备;
98.在第一场景区域内,移动式消毒机器人接收到消毒任务,将定位装置获取的位置信息上传至后台控制设备2,后台控制设备2根据移动式消毒机器人的位置信息调取第一场景区域的全域地图,并将第一场景区域的全域地图划分为若干个区域块;
99.根据消毒任务关联的消毒项目,在各个区域块内配置消毒点位,并根据消毒点位生成移动式消毒机器人的移动消毒路径,移动底盘根据移动消毒路径移动,消毒单元在移
动消毒路径的各个区域块内执行消毒动作。
100.在第二场景区域内,固定式消毒设备根据消毒任务关联的消毒项目,启动相应的消毒模式对第二场景区域进行消毒。
101.在消毒的过程中,后台控制设备2配置的记录模块7能够记录每个时间点的环境质量指数,后台控制设备2配置的分析模块8能够根据一个消毒周期内的环境质量指数变化率,输出消毒效果指数,并记录于记录模块7,实现消毒过程的记录分析。
102.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1