用于图像引导的外科手术的连续配准的系统和方法与流程
用于图像引导的外科手术的连续配准的系统和方法
1.本技术是于2017年10月31日提交的名称为“用于图像引导的外科手术的连续配准的系统和方法”的中国专利申请2017800578210(pct/us2017/059358)的分案申请。
2.相关申请
3.本专利申请要求2016年11月2日提交的题为“用于图像引导的外科手术的连续配准的系统和方法(systems and methods of continuous registration for image-guided surgery)”的美国临时专利申请62/416,393的优先权和申请日的权益,其全部内容通过引用合并于此。
技术领域
4.本公开涉及用于进行图像引导的程序的系统和方法,并且更具体地涉及用于将患者解剖结构的模型配准到在医疗程序中使用的一个或多个器械的系统和方法。
背景技术:
5.微创医疗技术意图减少医疗程序期间损伤的组织量,从而减少患者恢复时间、不适和有害副作用。可以通过患者解剖结构的自然孔口或通过一个或多个手术切口进行这种微创技术。通过这些自然孔口或切口,临床医生可以插入微创医疗器械(包括手术、诊断、治疗或活检器械)到达目标组织方位。为了帮助到达目标组织方位,医疗器械的方位和移动可以与患者解剖结构的术前或术中图像相关。利用与图像相关的图像引导器械,器械可以在解剖系统中导航自然或手术创建的通路,解剖系统诸如肺、结肠、肠、肾、心脏、循环系统或诸如此类。需要用于以最小的临床干扰执行在图像引导的外科手术期间使用的配准模型的系统和方法。
技术实现要素:
6.随附于说明书的权利要求最佳地概括了本发明的实施例。
7.然而,一种将患者的一个或多个解剖通路的模型配准到患者空间的示例性方法可以包括:访问患者的一个或多个解剖通路的模型的模型空间中的一组模型点;沿插入患者的一个或多个解剖通路的导管的长度收集第一组测量点,在患者空间中测量点由导管的形状确定;以及将第一组测量点的点分配给测量点的多个第一子集。该示例性方法可以进一步包括:配准测量点的第一子集与一组模型点以产生第一多个配准候选者;比较配准候选者以识别与第一多个配准候选者的最佳配准相关联的最佳子集;以及在由显示器提供的用户界面中显示最佳配准的视觉表示。最佳配准将一组模型点和第一组测量点的至少一个子集转换到公共空间中。
8.将患者的一个或多个解剖通路的模型配准到患者空间的另一种示例性方法可以包括:访问患者的一个或多个解剖通路的模型的一组模型点;沿着插入患者的一个或多个解剖通路的导管的长度收集一组测量点,在患者空间中测量点由导管的形状确定;以及配准一组测量点的子集与一组模型点,以产生多个配准候选者。该示例性方法可以进一步包
括:选择多个配准候选者中的一个配准候选者以用于执行医疗程序,并且将所选择的配准候选者应用于模型的一组模型点以将模型配准到患者空间。
9.一种示例性医学成像系统可以包括:运动检测器;柔性导管,其近端耦接到可沿插入台移动的器械托架;以及点收集器械,其沿着柔性导管的长度延伸。该示例性系统可以进一步包括跟踪系统,其被配置为将由点收集器械收集的一组测量点配准到一个或多个解剖通路的模型。跟踪系统可以访问模型空间中的一组模型点并且沿着插入患者的一个或多个解剖通路中的柔性导管的长度收集一组测量点,在患者空间中测量点由导管的形状确定。跟踪系统还可以根据由运动检测器监测的周期性生理功能将一组测量点分配到子集中;基于测量点的子集从多个配准候选者中选择第一配准候选者;以及将所选择的第一配准候选者应用于模型的一组模型点以将模型配准到患者空间。应理解,以上大致描述和以下详细描述二者本质上是示例性和解释性的,并且旨在提供对本公开的理解而非限制本公开的范围。就此而言,根据下面的详细描述,本公开的附加方面、特征和优点对于本领域技术人员将是明显的。
附图说明
10.图1是根据本公开的实施例的远程操作医疗系统的简化示意图。
11.图2a是利用本公开的各方面的医疗器械系统的简化示意图。
12.图2b是根据一些实施例的具有延伸的医疗工具的医疗器械的简化示意图。
13.图3a和图3b是根据本公开的一些实施例的包括被安装在插入组装件上的医疗器械的患者坐标空间的侧视图。
14.图4a、图4b、图4c和4d图示了在插入人肺内期间图2、图3a、图3b的医疗器械系统的远端。
15.图5是图示根据本公开的一个实施例的用于在图像引导的外科手术程序中提供引导的方法的流程图。
16.图6a、图6b和图6c图示了根据本公开的一个实施例的生成用于配准的人肺模型的分段过程中的步骤。
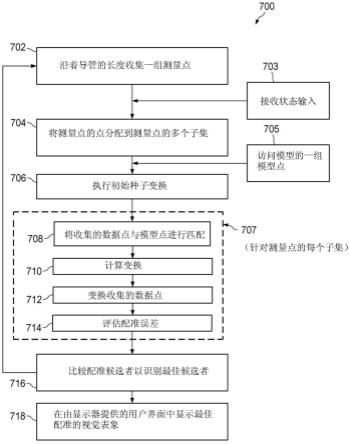
17.图7图示了根据本公开的一个实施例的图像引导的外科手术程序的一部分的流程图。
18.图8a和图8b图示了根据本公开的一个实施例的用于收集患者解剖结构内的测量点的基于相位的分箱(binning)过程和基于幅度的分箱过程。
19.图9图示了根据本公开的一个实施例的患者解剖结构内的测量点的基于相位和基于幅度的分箱。
20.图10a、图10b、图10c和图10d图示了根据本公开的一个实施例的患者解剖结构内的测量点的基于插入深度的分箱。
21.图11a和图11b图示了根据本公开的一个实施例的患者解剖结构的中心线模型和一组测量点之间的配准。
22.图12a和图12b图示了根据本公开另一实施例的患者解剖结构的中心线模型与一组测量点之间的配准。
23.图13a和图13b图示了根据本公开的一个实施例的配准技术的显示阶段。
24.通过参考随后的详细描述,将最好地理解本公开的示例及其优点。应认识到,同样的附图标记被用来识别在一个或多个附图中图示的同样的元件,其中的标识是用于图示本公开的实施例的目的,并不是用于限制本公开。
具体实施方式
25.在以下描述中,阐述了描述与本公开一致的一些实施例的特定细节。阐述了很多特定细节,以便提供对实施例的充分理解。然而,对本领域技术人员显而易见的是,可以在没有这些特定细节中的一些或全部的情况下实践一些实施例。本文中公开的特定实施例旨在是图示性的而不是限制性的。本领域技术人员可以实现尽管此处未具体描述但是在本公开的范围和精神内的其他元件。此外,为了避免不必要的重复,结合一个实施例示出并描述的一个或多个特征可以被并入到其他实施例内,除非另外具体描述或如果一个或多个特征将会使实施例不能工作。
26.在一些实例中,公知的方法、程序、部件和电路未被详细描述,从而不会不必要地混淆实施例的多个方面。
27.本公开就不同器械和器械部分在三维空间中的状态而言对其进行描述。如本文所用,术语“位置”指代对象或对象的一些部分在三维空间中的方位(例如,沿笛卡尔x、y和z坐标的三个平移自由度)。如本文所用,术语“取向”指代对象或对象的一些部分的旋转布置(三个旋转自由度,例如,滚转、俯仰和偏航)。如本文所用,术语“姿态”指代对象或对象的一些部分在至少一个平移自由度上的位置和对象或对象的一些部分在至少一个旋转自由度上的取向(多达总共六个自由度)。如本文所用,术语“形状”指代沿着对象测量的一组姿态、位置或取向。
28.图1是根据一些实施例的远程操作医疗系统100的简化示意图。在一些实施例中,远程操作医疗系统100可以适合于在例如手术、诊断、治疗、或活检程序中使用。如图1所示,医疗系统100一般包括用于操作医疗器械104以对患者p执行各种程序的远程操作操纵器组装件102。远程操作操纵器组装件102安装于操作台t或安装在操作台t附近。被称为主控组装件106的操作者输入系统允许如图1所示的操作者o(例如,外科医生、临床医生或医师)观看介入部位并控制远程操作操纵器组装件102。
29.主控组装件106可以位于医师控制台处,所述医师控制台通常与手术台t位于相同的房间中,诸如在患者p位于其上的外科手术台的一侧。然而,应当理解,操作者o可以与患者p位于不同的房间或完全不同的建筑中。主控组装件106一般包括用于控制远程操作操纵器组装件102的一个或多个控制装置。所述控制装置可以包括任意数量的各种输入装置,如操纵杆、跟踪球、数据手套、触发枪、手动操作控制器、语音识别装置、身体动作或存在传感器和/或类似装置。为了给操作者o提供直接控制器械104的强烈感觉,可以为控制装置提供与关联的医疗器械104相同的自由度。以此方式,控制装置为操作者o提供控制装置与医疗器械104为一体的远程呈现或感知。
30.在一些实施例中,控制装置可以比相关医疗器械104具有更多或更少的自由度,并且仍向操作者o提供远程呈现。在一些实施例中,控制装置可以可选地是手动输入装置,其以六个自由度运动并且还可以包括用于致动器械(例如,闭合夹爪、施加电势至电极、递送药物治疗和/或类似作用)的可致动手柄。
31.远程操作操纵器组装件102支撑医疗器械104并且可以包括一个或多个非伺服控制的连杆的运动学结构(例如,可手动定位并锁定在适当位置的一个或多个连杆,通常被称为组建(set-up)结构)以及远程操作操纵器。远程操作操纵器组装件102可以任选地包括响应于来自控制系统(例如,控制系统112)的命令而驱动医疗器械104上的输入的多个致动器或马达。致动器可以任选地包括驱动系统,当该驱动系统耦接到医疗器械104时,该驱动系统可将医疗器械104推进到自然的或外科手术创建的解剖孔口。其他驱动系统可以以多个自由度移动医疗器械104的远端,所述多个自由度可以包括三个线性运动自由度(例如,沿x、y、z笛卡尔坐标轴的线性运动)和三个旋转运动自由度(例如,围绕x、y、z笛卡尔坐标轴的旋转)。此外,致动器可被用于致动医疗器械104的可铰接末端执行器,以便将组织抓取在活检设备和/或类似设备的钳口(jaw)中。致动器位置传感器(诸如解算器、编码器、电位计和其他机构)可以为医疗系统100提供描述马达轴的旋转和取向的传感器数据。这种位置传感器数据可以被用来确定由致动器操纵的对象的运动。
32.远程操作医疗系统100可以包括传感器系统108,该传感器系统108具有用于接收关于远程操作操纵器组装件102的器械的信息的一个或多个子系统。这些子系统可以包括:位置/方位传感器系统(例如,电磁(em)传感器系统);用于确定沿着可组成医疗器械104的柔性主体的远端和/或一个或多个节段的位置、取向、速度、速率、姿态和/或形状的形状传感器系统;和/或用于从医疗器械104的远端采集图像的可视化系统。
33.远程操作医疗系统100还包括显示系统110,用于显示由传感器系统108的子系统生成的外科手术部位和医疗器械104的图像或表示。显示系统110和主控组装件106可以被取向,使得操作者o能够在远程呈现的感知的情况下控制医疗器械104和主控组装件106。
34.在一些实施例中,医疗器械104可以具有可视化系统(在下面更详细地进行讨论),所述可视化系统可以包括观察视镜组装件,所述观察视镜组装件记录外科手术部位的并发或实时图像并且通过医疗系统100的一个或多个显示器(诸如显示系统110的一个或多个显示器)为操作者或操作者o提供图像。并发图像可以是例如通过定位在外科手术部位内的内窥镜采集的二维或三维图像。在一些实施例中,可视化系统包括可以被一体地或可移除地耦接到医疗器械104的内窥镜部件。然而,在一些实施例中,被附接到单独操纵器组装件的单独内窥镜可以与医疗器械104一起被用来对外科手术部位进行成像。在一些示例中,内窥镜可以包括用于在一个或多个透镜被内窥镜遇到的流体和/或其他材料部分遮挡和/或完全遮挡时清洁内窥镜的一个或多个透镜的一个或多个机构。在一些示例中,一个或多个清洁机构可以可选地包括空气和/或其他气体输送系统,其可用于发射一股空气和/或其他气体以吹净一个或多个透镜。在国际公开wo/2016/025465(2016年8月11日提交)(公开“systems and methods for cleaning an endoscopic instrument”)中更详细地讨论了一个或多个清洁机构的示例,其通过引用全文合并于此。可视化系统可以被实施为与一个或多个计算机处理器(其可包括控制系统112的处理器)相互作用或以其他方式由该一个或多个计算机处理器执行的硬件、固件、软件或其组合。控制系统112的处理器可以执行对应于本文描述的方法和操作者的指令。
35.显示系统110也可以显示通过可视化系统采集的外科手术部位和医疗器械的图像。在一些示例中,远程操作医疗系统100可以配置医疗器械104和主控组装件106的控制件,使得医疗器械的相对位置类似于操作者o的眼睛和手的相对位置。以此方式,操作者o能
够如同以基本真实的存在感观察工作空间那样来操纵医疗器械104和手部控制件。通过真实的存在感,意味着图像的呈现是模拟物理地操纵医疗器械104的医师的视角的真实透视图像。
36.在一些示例中,显示系统110可以使用来自成像技术(诸如计算机断层扫描(ct)、磁共振成像(mri)、荧光镜检查、热影像技术、超声波、光学相干断层成像术(oct)、热成像、阻抗成像、激光成像、纳米管x射线成像和/或诸如此类)的图像数据呈现术前或术中记录的外科手术部位的图像。术前或术中图像数据可以被呈现为二维、三维或四维(包括例如基于时间或基于速度的信息)图像,和/或被呈现为来自从术前或术中图像数据集产生的模型的图像。
37.在一些实施例中,通常为了成像引导的外科手术程序的目的,显示系统110可以显示虚拟的导航图像,在该虚拟的导航图像中,医疗器械104的实际方位与术前或并发图像/模型配准(即动态参考)。这可以被完成,以从医疗器械104的视角向操作者o呈现内部外科手术部位的虚拟图像。在一些示例中,视角可以是从医疗器械104的尖端观看。医疗器械104的尖端的图像和/或其他图形或字母数字指示符可以叠加在虚拟图像上以帮助操作者o控制医疗器械104。在一些示例中,医疗器械104可以在虚拟图像中不可见。
38.在一些实施例中,显示系统110可以显示虚拟的导航图像,在该虚拟的导航图像中,医疗器械104的实际方位与术前图像或并发图像配准,以从外部视角向操作者o呈现在外科手术部位内的医疗器械104的虚拟图像。医疗器械104的一部分的图像或其他图形或字母数字指示符可以叠加在虚拟图像上以帮助操作者o控制医疗器械104。如本文所描述的,数据点的视觉表示可以被渲染到显示系统110。例如,可以以视觉表示将测量的数据点、移动的数据点、配准的数据点以及本文描述的其他数据点显示在显示系统110上。可以通过显示系统110上的多个点(point)或圆斑(dot)或作为渲染的模型(诸如基于一组数据点所创建的网格或金属线模型)在用户界面上可视地表示数据点。在一些示例中,数据点可以根据它们表示的数据进行颜色编码。在一些实施例中,在每个处理操作已经被实现以改变数据点之后,视觉表示可以在显示系统110中被刷新。在一些实施例中,虚拟导航图像可以呈现在显示器110中,显示器110从沿着或穿过对应的实际解剖通路插入的器械的视角描绘解剖通路的模型。
39.远程操作医疗系统100还可以包括控制系统112。控制系统112包括至少一个存储器和至少一个计算机处理器(未示出),用于实现医疗器械104、主控组装件106、传感器系统108和显示系统110之间的控制。控制系统112还包括程序化指令(例如,存储这些指令的非临时性机器可读介质)以实施根据本文公开的各方面描述的方法的一些或全部,包括用于向显示系统110提供信息的指令。虽然控制系统112在图1的简化示意图中被示出为单个框,但该系统可以包括两个或更多个数据处理电路,其中一部分处理可选地在远程操作操纵器组装件102上或邻近远程操作操纵器组装件102执行,另一部分处理在主控组装件106处执行和/或类似情况。控制系统112的处理器可以执行一些指令,包括对应于在本文中公开并且在下面更详细地描述的处理的指令。可以利用任何各种各样的集中式或分布式数据处理体系结构。类似地,程序化指令可以被实施为若干独立的程序或子程序,或者它们可以集成到本文所描述的远程操作系统的若干其他方面中。在一个实施例中,控制系统112支持无线通信协议,诸如蓝牙、irda(红外数据通信)、homerf(家庭射频)、ieee 802.11、dect(数字增
强无绳通信)和无线遥测。
40.在一些实施例中,控制系统112可以从医疗器械104接收力和/或扭矩反馈。响应于该反馈,控制系统112可以向主控组装件106传输信号。在一些示例中,控制系统112可以传输命令远程操作操纵器组装件102的一个或多个致动器移动医疗器械104的信号。医疗器械104可以经由患者p的身体中的开口延伸到患者p的身体内的内部外科手术部位。可以使用任何合适的常规的和/或专门的致动器。在一些示例中,一个或多个致动器可以与远程操作操纵器组装件102分开,或者与远程操作操纵器组装件102集成在一起。在一些实施例中,一个或多个致动器和远程操作操纵器组装件102被提供作为邻近患者p和操作台t定位的远程操作推车的一部分。
41.控制系统112可以可选地进一步包括虚拟可视化系统,以便当在图像引导的外科手术程序期间控制医疗器械104时为操作者o提供导航帮助。使用虚拟可视化系统的虚拟导航可以基于对采集的解剖通路的术前或术中数据集的参考。虚拟可视化系统处理使用成像技术(诸如计算机断层扫描(ct)、磁共振成像(mri)、荧光镜检查、热影像技术、超声、光学相干断层成像术(oct)、热成像、阻抗成像、激光成像、纳米管x射线成像和/或诸如此类)成像的外科手术部位的图像。可以与手动输入结合使用的软件被用来将记录的图像转换为局部或整体解剖器官或解剖区域的分段二维或三维复合表示。图像数据集与复合表示相关联。复合表示和图像数据集描述通路的各种方位和形状以及它们的连接性。被用来生成复合表示的图像可以在临床程序期间在术前或术中被记录。在一些实施例中,虚拟可视化系统可以使用标准表示(即,不是患者特异性的)或者标准表示与患者特异性数据的混合体。复合表示和由该复合表示生成的任何虚拟图像可以表示可变形解剖区域在一个或多个运动阶段期间(例如,在肺的吸气/呼气循环期间)的静态姿态。
42.在虚拟导航程序期间,传感器系统108可以被用来计算医疗器械104相对于患者p的解剖结构的近似方位。该方位能够被用来产生患者p的解剖结构的宏观水平(外部)跟踪图像和患者p的解剖结构的虚拟内部图像两者。该系统可以实施一个或多个电磁(em)传感器、光纤传感器和/或其他传感器,以配准并显示医疗实施和术前记录的外科手术图像。,诸如来自虚拟可视化系统的那些图像是已知的。例如,美国专利申请号13/107,562(2011年5月13日提交)(公开“medical system providing dynamic registration of a model of an anatomic structure for image-guided surgery”)公开了一种这样的系统,该申请通过引用以其整体并入本文。远程操作医疗系统100可以进一步包括可选的操作和支持系统(未示出),诸如照明系统、转向(steering)控制系统、冲洗系统和/或抽吸(suction)系统。在一些实施例中,远程操作医疗系统100可以包括一个以上的远程操作操纵器组装件和/或一个以上的主控组装件。除了其他因素,远程操作操纵器组装件的准确数目将取决于外科手术程序和手术室内的空间约束。主控组装件106可以被并置(collocated),或它们可以被定位在分离的方位中。多个主控组装件允许一个以上的操作者以各种组合形式控制一个或多个远程操作操纵器组装件。
43.图2a是根据一些实施例的医疗器械系统200的简化示意图。在一些实施例中,医疗器械系统200可以在利用远程操作医疗系统100执行的图像引导的医疗程序中被用作医疗器械104。在一些示例中,医疗器械系统200可以被用于非远程操作探索性程序或用在涉及传统手动操作的医疗器械(诸如内窥镜)的程序中。可选地,医疗器械系统200可以被用来收
集(即测量)对应于患者(诸如患者p)的解剖通路内的方位的一组数据点。
44.医疗器械系统200包括被耦接到驱动单元204的细长装置202(诸如,柔性导管)。细长装置202包括柔性主体216,该柔性主体216具有近端217和远端或尖端部分218。在一些实施例中,柔性主体216具有大约3mm的外直径。其他柔性主体外直径可以更大或更小。
45.医疗器械系统200进一步包括跟踪系统230,跟踪系统230用于使用如在下面进一步详细描述的一个或多个传感器和/或成像装置来确定远端218和/或沿着柔性主体216的一个或多个节段224的位置、取向、速度、速率、姿态和/或形状。远端218和近端217之间的柔性主体216的整个长度可以被有效地划分为多个节段224。如果医疗器械系统200与远程操作医疗系统100的医疗器械104一致,跟踪系统230。跟踪系统230可以被可选地实现为与一个或多个计算机处理器相互作用或以其他方式由一个或多个计算机处理器执行的硬件、固件、软件或其组合,所述一个或多个计算机处理器可以包括图1中的控制系统112的处理器。
46.跟踪系统230可以可选地使用形状传感器222来跟踪远端218和/或一个或多个节段224。形状传感器222可以可选地包括与柔性主体216对齐的光纤(例如,在内部通路(未示出)内提供或外部安装)。在一个实施例中,光纤具有大约200μm的直径。在其他实施例中,该尺寸可以更大或更小。形状传感器222的光纤形成用于确定柔性主体216的形状的光纤弯曲传感器。在一个替代方案中,包括光纤布拉格光栅(fbg)的光纤被用于在一个或多个维度上在结构中提供应变测量。形状传感器系统222的光纤可以使得能够同时收集一组测量点,这些测量点描述在单个时间点沿着柔性导管主体216的长度的形状传感器222的各个部分的位置。在美国专利申请号11/180,389(2005年7月13日提交)(公开“fiber optic position and shape sensing device and method relating thereto”);美国专利申请号12/047,056(2004年7月16日提交)(公开“fiber-optic shape and relative position sensing”);以及美国专利号6,389,187(1998年6月17日提交)(公开“optical fiber bend sensor”)中描述了用于监测三维中的光纤的形状和相对位置的各种系统和方法,这些申请通过引用整体并入本文。
47.在一些实施例中,传感器可以采用其他合适的应变感测技术,诸如瑞利散射、拉曼散射、布里渊散射和荧光散射。在一些实施例中,细长装置的形状可以使用其他技术来确定。例如,柔性主体216的远端姿态的历史能够被用来重建柔性主体216在该时段内的形状。在一些实施例中,跟踪系统230可以可选地和/或额外地使用位置传感器系统220来跟踪远端218。位置传感器系统220可以是具有位置传感器系统220的em传感器系统的部件,em传感器系统包括可以经受外部生成的电磁场的一个或多个传导线圈。然后em传感器系统220的每个线圈产生感应电信号,所述感应电信号具有取决于线圈相对于外部生成的电磁场的位置和取向的特性。在一些实施例中,位置传感器系统220可以被配置并且被定位为测量六个自由度(例如,三个位置坐标x、y、z和指示基点的俯仰、偏航和滚动的三个取向角)或五个自由度(例如,三个位置坐标x、y、z和指示基点的俯仰和偏航的两个取向角)。在美国专利号6,380,732(1999年8月11日提交)(公开“six-degree of freedom tracking system having a passive transponder on the object being tracked”)中提供了位置传感器系统的进一步描述,该专利通过引用整体并入本文。在一些实施例中,形状传感器222还可以用作位置传感器,因为传感器222的形状连同关于形状传感器222的基部的方位的信息(在患者的固定坐标系中,被称为“患者空间”)允许计算沿着形状传感器的各个点的方位,包括远侧尖
端。
48.在一些实施例中,跟踪系统230可以替代地和/或额外地依赖于针对器械系统的已知点沿着交替运动(诸如呼吸)的周期所存储的历史姿态、位置或取向数据。该存储的数据可以被用来发展关于柔性主体216的形状信息。在一些示例中,一系列位置传感器(未示出)(诸如与位置传感器220的传感器类似的电磁(em)传感器)可以沿着柔性主体216进行定位,并且然后被用于形状感测。在一些示例中,在某一程序期间获取的来自这些传感器中的一个或多个传感器的数据的历史可以被用来表示细长装置202的形状,特别是如果解剖通路是大致静态的。跟踪系统230可以包括位置传感器系统220和形状传感器系统222,以便确定远端218和沿着器械200的一个或多个节段224的位置、取向、速度、姿势和/或形状。跟踪系统230可以实现为硬件、固件、软件或其组合,其与一个或多个计算机处理器交互或以其他方式由一个或多个计算机处理器执行,一个或多个计算机处理器可以包括控制系统116的处理器。
49.柔性主体216包括被设置尺寸且成形为接收医疗器械226的通路221。图2b是根据一些实施例的在医疗器械226被延伸的情况下的柔性主体216的简化示意图。在一些实施例中,医疗器械226可以被用于诸如外科手术、活检、消融、辐照、灌注或抽吸的程序。医疗器械226能够通过柔性主体216的通路221来部署,并且在解剖结构内的目标方位处被使用。医疗器械226可以包括例如图像采集探针、活检器械、激光消融纤维和/或其他手术、诊断或治疗工具。医疗工具可以包括具有单个工作构件的末端执行器,诸如解剖刀、钝刀片、光纤、电极和/或类似物。其他末端执行器可以包括例如镊子、抓紧器、剪刀、施夹器和/或类似物。其他末端执行器可以进一步包括电激活的末端执行器,诸如电外科电极、换能器、传感器和/或类似物。在各种实施例中,医疗器械226是活检器械,其可以被用来从目标解剖方位移除样本组织或细胞的采样。医疗器械226可以与也在柔性主体216内的图像采集探针一起使用。在各种实施例中,医疗器械226可以是图像采集探针,其包括在柔性主体216的远端218处或附近具有用于采集图像(包括视频图像)的立体相机或单视场相机的远端部分,该图像被可视化系统231处理以便显示和/或提供给跟踪系统230以支持远端218和/或节段224中的一个或多个的跟踪。图像采集探针可以包括耦接到摄像机用于传输所采集的图像数据的电缆。在一些示例中,图像采集器械可以是耦接到可视化系统231的光纤束,诸如纤维镜。图像采集器械可以是单光谱的或多光谱的,例如采集在可见光谱、红外光谱和/或紫外光谱中一个或多个光谱中的图像数据。可替代地,医疗器械226本身可以是图像采集探针。医疗器械226可以从通路221的开口被推进以执行程序,并且然后当该程序完成时被缩回到通路内。医疗器械226可以从柔性主体216的近端217或从沿着柔性主体216的另一可选器械端口(未示出)被移除。
50.医疗器械226可以额外地容纳在其近端和远端之间延伸以可控地弯曲医疗器械226的远端的电缆、联动装置或其他致动控制件(未示出)。在美国专利号7,316,681(2005年10月4日提交)(公开“articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity”)和美国专利申请号12/286,644(2008年9月30日提交)(公开“passive preload and capstan drive for surgical instruments”)中详细描述了可转向器械,该专利和专利申请通过引用整体并入本文。
51.柔性主体216也可以容纳在驱动单元204与远端218之间延伸以便如例如通过远端218的虚线描绘219示出的那样可控地弯曲远端218的电缆、联动装置或其他转向控制件(未示出)。在一些示例中,至少四个电缆被用来提供控制远端218的俯仰的独立的“上下”转向和控制远端281的偏航的“左右”转向。在美国专利申请号13/274,208(2011年10月14日提交)(公开“catheter with removable vision probe”)中详细地描述了可转向细长装置,该专利申请通过引用整体并入本文。在医疗器械系统200由远程操作组装件致动的实施例中,驱动单元204可以包括可移除地耦接到远程操作组装件的驱动元件(诸如致动器)并且从该驱动元件接收动力的驱动输入装置。在一些实施例中,医疗器械系统200可以包括夹紧特征件、手动致动器或用于手动控制医疗器械系统200的运动的其他部件。细长装置202可以是可转向的,或可替代地,该系统在没有用于操作者控制远端218的弯曲的集成机构的情况下可以是不可转向的。在一些示例中,一个或多个腔被限定在柔性主体216的壁中,医疗器械能够通过所述一个或多个腔在目标外科手术方位处被部署并且被使用。
52.在一些实施例中,医疗器械系统200可以包括柔性支气管器械,诸如用于在肺的检查、诊断、活检或治疗中使用的支气管镜或支气管导管。医疗器械系统200也适用于在各种解剖系统(包括结肠、肠、肾和肾盏、大脑、心脏、包括脉管系统的循环系统和/或诸如此类)中的任一解剖系统中,经由自然的或外科手术建立的连接通路对其他组织进行导航和治疗。
53.来自跟踪系统230的信息可以被发送给导航系统232,其中它与来自可视化系统231的信息和/或术前获得的模型进行组合以便为医师或其他操作者提供实时位置信息。在一些示例中,实时位置信息可以被显示在图1的显示系统110上以用于医疗器械系统200的控制。在一些示例中,图1的控制系统116可以将位置信息用作反馈以便定位医疗器械系统200。2011年5月13日提交的公开“medical system providing dynamic registration of a model of an anatomic structure for image-guided surgery”的美国专利申请号13/107,562中提供了用于利用光纤传感器来配准和显示外科手术器械与外科手术图像的各种系统,该专利申请通过引用整体并入本文。
54.在一些示例中,医疗器械系统200可以在图1的医疗系统100内被远程操作。在一些实施例中,图1的远程操作操纵器组装件102可以由直接操作者控制件来代替。在一些示例中,直接操作者控制件可以包括用于器械的手持操作的各种手柄和操作者界面。
55.图3a和图3b是根据一些实施例的包括被安装在插入组装件上的医疗器械的患者坐标空间的侧视图的简化示意图。如图3a和图3b所示,外科手术环境300包括患者p被定位在图1的操作台t上。从通过镇静、约束和/或其他手段来限制大幅度患者移动的意义上讲,患者p在外科手术环境内可以是静止的。周期性解剖结构运动(包括患者p的呼吸和心脏运动)可以继续,除非告诉患者屏住他或她的呼吸以暂时中止呼吸运动。因此,在一些实施例中,数据可以在呼吸中的特定相位处进行收集,并且利用该相位来进行标记和识别。在一些实施例中,在其间收集数据的相位可以根据从患者p收集的生理信息来推测。在外科手术环境300内,点收集器械304被耦接到器械托架306。在一些实施例中,点收集器械304可以使用em传感器、形状传感器和/或其他传感器模态。器械托架306被安装到固定于外科手术环境300内的插入台308。可替代地,插入台308可以是可移动的,但是在外科手术环境300内具有已知的方位(例如,经由跟踪传感器或其他跟踪装置来获知)。器械托架306可以是远程操作
操纵器组装件(例如,远程操作操纵器组装件102)的部件,该部件耦接到点收集器械304以控制插入运动(即沿着a轴线的运动)并且可选地控制细长装置310的远端318沿多个方向的运动(包括偏航、俯仰和滚动)。器械托架306或插入台308可以包括控制器械托架306沿着插入台308的运动的致动器(未示出),诸如伺服马达。
56.细长装置310被耦接到器械主体312。器械主体312相对于器械托架306被耦接并且被固定。在一些实施例中,光纤形状传感器314被固定在器械主体312上的近侧点316处。在一些实施例中,光纤形状传感器314的近侧点316可以是连同器械主体312一起可移动的,但是近侧点316的方位可以是已知的(例如,经由跟踪传感器或其他跟踪装置来获知)。形状传感器314测量从近侧点316到另一点(诸如细长装置310的远端318)的形状。点收集器械304可以基本上类似于医疗器械系统200。
57.当器械主体312在插入台308上沿着插入轴线a移动时,位置测量装置320提供关于器械主体312的位置的信息。位置测量装置320可以包括解算器、编码器、电位计和/或确定控制器械托架306的运动并因此控制器械主体312的运动的致动器的旋转和/或取向的其他传感器。在一些实施例中,插入台308是线性的。在一些实施例中,插入台308可以是弧形的,或者具有弧形和线性区段的组合。
58.图3a示出了处于沿着插入台308的缩回位置的器械主体312和器械托架306。在该缩回位置中,近侧点316在轴线a上的位置l0处。在沿着插入台308的该位置中,近侧点316的方位的a分量可以被设置为零和/或另一参考值,以提供描述器械托架306并且因此近侧点316在插入台308上的位置的基本参考。通过器械主体312和器械托架306的该缩回位置,细长装置310的远端318可以被刚好定位在患者p的进入孔口内部。同样在该位置中,位置测量装置320可以被设置为零和/或另一参考值(例如,i=0)。在图3b中,器械主体312和器械托架306已经沿着插入台308的可以是线性或弧形的轨道推进,并且细长装置310的远端318已经被推进到患者p内。在该推进位置中,近侧点316在轴线a上的位置l1处。在一些示例中,来自控制器械托架306沿着插入台308的移动的一个或多个致动器和/或与器械托架306和/或插入台308相关联的一个或多个位置传感器的编码器和/或其他位置数据被用来确定近侧点316相对于位置l0的位置l
x
。在一些示例中,位置l
x
可以进一步被用作细长装置310的远端318被插入到患者p的解剖结构的通路内的距离或插入深度的指示符。在插入期间并且当插入患者p的解剖结构内时,形状传感器314可用于收集患者p的解剖结构内的测量的数据点。
59.点收集器械304的实施例可以使用任何数量的模态(包括em感测和形状感测)来收集测量点。当从患者的解剖通路内收集测量点时,这些点存储在数据存储设备中,诸如存储器。该组测量点可以存储在数据库中,该数据库包括在该程序期间或在紧接该程序之前获得的测量点中的至少一些,但可以包括全部。该组测量点可以被分箱、分类或过滤,以产生以某种方式相关,例如在周期性生理运动(例如呼吸)的共同阶段或阶段的一部分期间获得的测量点的子集。当存储在存储器中时,每个点可以由包括点的坐标、时间戳和相对传感器位置或单个传感器id的数据表示(当沿着点收集器械304的长度分布的多个传感器被用于同时确定若干点的方位时)。测量点的分箱子集可以存储在分离的数据结构中和/或存储器的分离部分中。在一些实施例中,表示每个点的数据还可以包括呼吸阶段标记,其指示收集该点的患者的呼吸阶段。患者运动跟踪器322可以用于监测和检测患者p的运动。该运动可以包括总运动以及周期性生理运动,诸如呼吸。因此,运动跟踪器322可以用作生理阶段检
测器。运动跟踪器322可以是光学跟踪系统或任何其他合适的系统。在其他实施例中,呼吸可以通过呼吸机或任何其他技术来监测。
60.图4a、图4b、图4c和图4d图示了图3a和图3b的导管310通过图1和图3的患者p的肺400的解剖通路402的推进。这些通路402包括气管和支气管。当托架306沿着插入台308移动时导管310被推进,外科医生s可以使导管310的远端318转向以导航通过解剖通路402。在导航通过解剖通路402时,导管310呈现可以由在导管310内延伸的形状传感器314“读取”的形状。如本文所述,使用柔性导管310获得的测量点可以基于多种因素分配给一个或多个箱(bin)。例如,测量点可以分配给对应于周期性生理运动(诸如呼吸)的部分的箱。测量点也可以分配给对应于导管310的插入深度的箱,使得在气管或支气管通路的特定代(generation)内测量的点可被汇集或包括在单个箱中,即使导管310的远端318推进通过解剖通路402也是如此。
61.图5是图示用于图像引导的外科手术程序的一般方法500的流程图。在过程502处,从成像技术(诸如计算机断层扫描(ct)、磁共振成像(mri)、荧光透视、热成像、超声、光学相干断层扫描(oct)、热影像技术、阻抗成像、激光成像或纳米管x射线成像)获得术前或术中图像数据。术前或术中图像数据可以对应于二维、三维或四维(包括例如基于时间或基于速度的信息)图像。例如,图像数据可以表示图4a到图4d的人肺400。在过程504处,使用单独操作或与手动输入组合操作的计算机系统将记录的图像转换成部分或整个解剖器官或解剖区域的分段的二维或三维复合表示或模型。例如,图6a图示了图4a到图4d的肺400的分段模型600。由于自然发生的限制或由于操作者设定的限制,分段模型600可能不包括人肺内存在的所有通路,但包括一些通路601。例如,肺的相对狭窄和/或远侧通路可能没有完全被包括在分段模型600中。分段模型600可以是三维模型,例如网格模型或其他合适的模型,其包括限定肺的内腔或通路的壁。通常,该模型提供用于区分解剖结构区域内的点和解剖结构区域外的点的机制或手段。复合表示和图像数据集描述了通路的各种方位和形状及其连接性,并且可以省略包括在术前或术中图像数据中的解剖结构的不期望部分。在一些实施例中,模型600可以包括特别期望的特征,例如疑似肿瘤或其他感兴趣的组织部分。
62.在分段过程期间,图像被划分为共享某些特征或诸如颜色、密度、强度和纹理的计算属性的节段或元素(例如,像素或体素)。该分段过程导致二维或三维重建,其基于所获得的图像形成目标解剖结构的模型,如模型600。为了表示模型,分段过程可划定表示目标解剖结构的体素集并且然后应用一个函数,诸如行进立方体函数(marching cube function),以生成包围体素的3d表面。可以通过生成网格、体积或体素图来制作模型。该模型可以在显示器110中示出,以帮助外科医生s可视化解剖结构,诸如肺的内部通路。
63.额外地或替代地,该模型可以包括中心线模型,该中心线模型包括一组互连的线段或延伸穿过模型化通路的中心的点。图6b示出了从模型600或直接从成像数据导出的示例性中心线模型602。中心线分段模型602可以包括一组三维直线或一组弧形线,其对应于分段模型602中包含的通路的近似中心。模型的分辨率越高,该组直线或弧形线将越精确地对应于通路的中心。与分段模型602的数据集相比,用中心线分段模型602表示肺可以提供由一个或多个处理器或处理核更有效地处理的较小数据集,分段模型602表示模型600的通路的壁。以这种方式,可以改进控制系统112的功能。
64.如图6b所示,中心线分段模型602包括若干分支点,其中一些分支点在图6b中被突
出显示以便可见。在若干分支点中的每一个处示出分支点a、b、c、d和e。分支点a可以表示模型中气管分成左主支气管和右主支气管的点。右主支气管可以在中心线分段模型602中被识别为位于分支点a和b之间。类似地,次级支气管由分支点b和c以及分支点b和e之间识别。可以在分支点c和d之间定义另一代。这些代中的每一代可以与对应通路的内腔直径的表示相关联。在一些实施例中,模型602可以包括每个分段代的平均直径值。平均直径值可以是患者特定的值或从多个患者导出的更通用的值。
65.在模型包括含有一组互连线段的中心线模型的情况下,那些线段可以被转换为点云或点集604,称为模型点,其由图6c的虚线表示。通过将线段转换成点,可以手动或自动选择对应于互连线段的所需数量的模型点,以在配准过程期间表示中心线模型602(从而表示模型600)。在数据中,该组模型点604中的每个点可以包括坐标,诸如一组xm,ym和zm,坐标或识别三维模型空间中的每个点的方位的其他坐标。在一些实施例中,每个点可以包括代标识符(generation identifier),其识别与点相关联的通路代和/或与中心线分段模型602的该部分相关联的直径或半径值。在一些实施例中,描述与给定点相关联的半径或直径的信息可以作为单独数据集的一部分提供。
66.在生成中心线分段模型602并将其作为图6c中所示的点集604存储在数据中之后,可以从数据存储装置中检索模型点604以用于图像引导的外科手术程序。为了在图像引导的外科手术程序中使用中心线分段模型602和模型600,可以配准模型点604以将模型600中的建模通路与存在于外科手术环境中的患者的实际解剖结构相关联。
67.返回图5,在过程506处,可以从对应于解剖模型的患者解剖结构获得测量点,如图3a到图3b和图4a到图4d所示。在过程508处,在对患者进行图像引导的外科手术程序的过程之前和/或期间,将解剖模型数据配准到患者解剖结构。通常,配准涉及通过使用刚性和/或非刚性变换将测量点与模型的点匹配。可以使用解剖结构中的界标,在程序期间扫描和跟踪的电磁线圈或形状传感器系统来生成测量点。可以生成测量点以用于迭代最近点(icp)技术,或者在本公开范围内也可以在配准过程中使用另一点集配准方法。
68.在其中解剖模型被配准到患者解剖结构使得相对于患者解剖结构定位的医疗器械可以相对于解剖模型来表示的过程508之后,来自患者解剖结构的测量点的收集可以继续。当添加新的测量点时,可以在过程510处更新配准。可以在整个外科手术程序中连续地执行配准的更新。以这种方式,可以补偿由于患者运动(粗略运动和周期性生理运动两者)引起的变化。另外,可以通过一个或多个标准将测量点分配到各个点子集中,并且通过这些标准可以将一些子集或特定子集确定为在将患者解剖结构配准到解剖模型时比其他子集更好。还可以为点分配数字加权,该数字加权反映了将点正确地分配给点的任何子集的部分概率。然而,可能在第一时间段内提供最佳配准的子集在稍后的时间段可能变得不理想。更新配准以使用在当时提供最佳配准的测量点的子集,可以确保维持模型和解剖结构之间的最佳和最有用的关系。当发生配准质量的统计上显著的变化时(例如,与配准相关联的错误值发生显著变化),与该配准相关联的测量点的子集可以通过删除所有点来清空或者可以具有对其施加的测量点的加权。
69.用于图像引导的外科手术的其他配准方法通常涉及使用基于电磁或阻抗感测的技术。在外科手术环境中使用的金属物体或某些电子设备可能产生损害感测数据质量的干扰。其他配准方法可能会妨碍临床工作流程。本文描述的系统和方法的一些实施例基于icp
或另一点集配准算法执行配准,以及点收集器械与光纤形状传感器的校准移动,从而消除或最小化外科手术环境中的中断。可以使用其他配准技术将一组测量点配准到术前模型或使用另一模态获得的模型。在下面描述的实施例中,可以消除患者和器械上的em传感器以及器械的光学跟踪系统。
70.图7是图示根据本公开的一些实施例的用于在外科手术环境300中的患者p上的图像引导的外科手术程序中向临床医生提供指导的方法700的流程图。方法700在图7中示出为一组块、步骤、操作或过程。并非所有说明的、列举的操作都可以在方法700的所有实施例中执行。另外,图7中未明确说明的一些额外操作可以在列举的操作之前、之后、之间或作为其一部分被包括。方法700的一些实施例可以包括对应于方法700的操作并存储在存储器中的机器可读指令。这些指令可以由如控制系统112的处理器等的处理器执行。
71.因此,方法700的一些实施例可以在操作702开始,其中沿着导管或其他医疗器械的长度收集该组测量点。例如,导管可以是图3a和图3b的点收集器械304,或者图2的医疗器械系统200。导管可包括光纤形状传感器,其可用于产生表示导管形状的多个三维点。通过具有光纤形状传感器的近端和已知方位或检测到的方位,三维点可以与患者空间相关。
72.在实践中,导管310的远端318可以穿过患者p的解剖通路(例如,患者的肺的气道),经由来自形状传感器314的数据记录导管的远端以及沿形状传感器的形状的其他点的方位数据。该方位数据可以包括或被处理以获得如本文所述的一组测量点。更具体地,导管610的远侧尖端的移动可以通过远程操作、手动或自动控制(例如,通过主控组装件106)来控制,以测量解剖通路的一部分。
73.例如,远程操作控制信号可以使托架306沿轴线a移动,使导管的远端318在解剖通路内前进或缩回。另外或替代地,远程操作控制信号可以引起在外科手术器械内延伸的控制构件的致动,以使远端318在包括偏转、俯仰和滚动的一系列运动中移动。当导管在多个通路内移动时,收集远侧尖端的多个方位的形状传感器数据(和/或不包括形状传感器的其他实施例中的其他位置数据)。在一些实施例中,导管可以延伸到大约三个分支,深入各个通路内。在一些实施例中,导管可以在肺的每侧延伸通过或延伸到大约三个或更多个分支的代。随着柔性导管310的直径减小和/或柔性导管310的柔性增加,导管310可接近的代的数量可以增加。
74.在一些实施例中,可以在使用如点收集器械304或其他合适的装置之类的位置测量装置,沿着插入路径的传感器参考点的相对位置和/或取向收集测量点之前执行校准程序。例如,当托架306从方位l0处的点316的缩回位置移动到方位l1处的点316的前进位置时,图3a和图3b的点收集器械304可以用于确定点316的位置和取向。校准程序可以确定点316在位置测量装置320中的每次改变时的移动方向。例如,导管310的远端318可以保持在固定位置,同时器械主体沿着插入台308布置路线。当器械主体沿插入台布置路线时,由形状传感器从固定点316收集的位置和取向数据与位置测量装置数据互相关,从而校准点316沿插入台308的轴线a的运动。
75.可选地,在操作703中,可以由控制系统112接收状态输入。例如,状态输入可以是描述患者p的呼吸或患者p的心跳的周期性生理运动信号。在其他实施例中,可以接收和使用其他周期性生理运动信号。下面进一步详细讨论的图8a和图8b图示了示例性周期性生理运动信号800的单个周期。周期性生理运动信号包括沿x轴示出的周期t和沿y轴示出的幅
度。图8a和图8b中示出的信号被简化以更清楚地传达本公开的某些方面。其他状态输入可以包括非生理输入,诸如器械速度、力、施加的应变或取向。其他状态输入可以包括检测到的摄像机障碍物(例如,由于雾或碎片)。其他状态输入可以包括被标记的测量点,其被指定为属于特定解剖结构方位或在特定解剖通路内。这样标记的点可以在配准期间充当“参考标准(ground truth)”点。
76.在操作704处,可以将测量点分配给多个测量点子集。在一些实施例中,操作702和704可以基本上同时执行。在其他实施例中,操作702可以包括将该组测量点存储在存储器中的点池中,并且操作704可以包括从存储器中检索该组测量点,并且然后将检索到的点分配给多个子集。将测量点分配给子集可以在本文中称为“分箱”。测量点可以各自分配给若干箱中的一个。箱可以是数据结构和/或存储器的特定部分。图8a和图8b图示了可以将测量点分配给特定箱的一些示例性方式。将每个点分配给任意箱可以是二进制的(明确地在给定箱内部或外部),或者它可以包含对由某些分数加权表示的任意箱的软分配。
77.如图8a所示,周期性生理运动信号800可用于对收集的测量点进行分箱。图8a图示了基于时间或基于周期的分箱,其中获得特定测量点的时间指示应该为该点分配的箱。应当注意,当使用光纤形状传感器来收集测量点时,一次收集多个点。此时从光纤形状传感器收集的所有点可以被分配给相同的箱或点的子集。例如,如果在0和t的1/8之间的时间从光纤传感器314收集点,则可以将点分配给箱a。如果在t的1/8和t的3/8之间的时间收集点,则可以将点分配给箱b。如果在t的3/8和t的5/8之间的时间收集点,则可以将点分配给箱c。如果在t的5/8和t的7/8之间的时间收集点,可以将点分配给箱d。如果在t的7/8和t之间的时间收集点,则可以将点分配给箱a。操作704的其他实施例可以不同地将收集的点分配给箱。例如,可以将测量点分配给多于四个箱中的一个箱。这些箱可以与周期t的不相等部分相关联。箱的截止可以发生在信号800的峰值和谷值处。
78.如图8a所示,周期性生理运动信号800可用于根据信号800的幅度对测量点进行分箱。图8b图示了将测量点分类为三个箱的幅度截止:箱e、箱f和箱g。例如,当周期性生理运动信号800的幅度大于峰值的一半时收集的点可被分配给箱e。当周期性生理运动信号800的幅度小于最小值的一半时收集的点可以被分配给箱g。在这些幅度值之间收集的点可以被分配给箱f。其他实施例可以包括更多的箱或更少的箱。
79.现在参考图9,其中示出了方法700的操作704的示例性图示。图9描绘了图3a到图3b和图4a到图4d的导管310。设置在导管310内的形状传感器(即,形状传感器314)在周期t内的四个离散时间部分(在时间t1、t2、t3和t4)期间测量点。时间t1、t2、t3和t4对应于不同的箱,如图9所示的箱a、b、c和d。如图9所示,导管310在t4处的形状和位置与导管310在时间t1、t2和t3处的形状和位置不同。该差异不是由于导管310更深地插入解剖通路402中引起的,而是可能由于患者p在呼吸期间肺400的周期性生理运动引起的。
80.现在参考图10a、图10b、图10c和图10d,示出了操作704的另一个实施例。在将每个测量点分配给多个箱中的一个箱时,可以基于用于测量点的导管的插入深度来进行分配。因此,可以从编码器或另一传感器接收基于托架306相对于台308的移动的深度值。可以基于图6b的分段中心线模型602在术前确定深度之间的截止。在其他实施例中可以使用其他深度。如图10a所示,导管310在特定时间收集的点可以被分类或分配到深度箱a和b中。如图10b所示,当收集测量点时,导管310已被更多地插入,因此将点分配给三个深度箱:深度箱
a、b和c。如图10c和图10d所示,当导管310更深地插入肺400的解剖通路中时,测量点被分配给深度箱a、b、c和d。如图10a到图10d所示,更近侧的深度箱可以包括更多的测量点,因为导管310的一部分已经在更长的时间段内持续处于近侧深度,在此期间可以定期收集点。在一些实施例中,箱中的点的数量可以被限制(cap),使得当测量新点时,从与该箱相关联的点的子集或池中移除最旧的点。
81.再次返回图7和方法700,在操作705处,控制系统112可以接收来自模型的一组模型点。例如,该组模型点可以是表示肺400的模型的一组点。在操作705处接收的该组模型点可以类似于图6c的模型点604,模型点604是从中心线模型602导出的一组点,中心线模型602基于模型600。该组模型点604可用于将模型600配准到用导管310收集的该组测量点。
82.在操作704之后,可以在操作706处执行初始种子变换以粗略地将测量点相对于模型点放置,使得可以执行随后的迭代配准操作。配准过程可以用关于患者外科手术环境和解剖模型之间的位移和取向关系的已知信息来提供种子。例如,可以在解剖模型信息中识别与肺400中的主要隆凸相关联的界标。对应的方位可以作为工作流程的一部分包括在测量点中。在操作707处,控制系统112可以将测量点的每个子集配准到该组模型点。可以使用点集配准算法(诸如操作708到714中描述的迭代最近点(icp)技术)或通过实现另一配准算法来完成配准。
83.在操作708处,在已经执行初始粗略种子变换以启动配准过程之后,从患者p内收集的一组测量数据点d与解剖模型点604匹配。例如,每个测量数据点d可以与该组解剖模型点604中的最近点匹配。在该实施例中,解剖模型点604是沿着从三维解剖模型生成的中心线(如从图6a和图6b的分段模型600生成的分段中心线模型602)的一组点。配准算法识别测量数据点中和该组解剖模型点604中的最近点之间的匹配。结果可以在图11a中看到,其示出了在初始种子过程或配准过程已经开始之后的具有一组测量点1100的模型点604。如图11a所示,该组测量点1100包括四个测量点子集,其包括子集1102a(由实心圆圈表示)、子集1102b(由加号表示)、子集1102c(由空心圆圈表示)和子集1102d(由x表示)。子集1102a、1102b、1102c和1102d可以统称为子集1102。
84.在各种替代方案中,模型点604与每个子集1102之间的匹配可以通过使用暴力破解技术、kd树技术等来完成。可以基于最大距离阈值计算、最大角度阈值计算或者用于过滤掉不被认为足够可靠以包含在模型中的匹配的其他度量来丢弃一些匹配。解剖模型点604可以由若干不同类型的点(包括中心线点、网格点和/或体积点)中的任何一个表示。
85.再次参考图7的方法700,在操作710处,确定将子集1102的每个子集映射到匹配的解剖模型点604的位置和取向所需的变换。更具体地,针对每个子集1102确定位置和取向的总计算偏移。在一些实施例中,可以限制计算的校正变换,使得仅一定数量的旋转度或一定数量的毫米位移可以应用于该过程的单次迭代。例如,即使计算20
°
的解剖模型点604的旋转或重新定向,医疗系统也可以将取向的变化限制为10
°
、5
°
或更小。类似地,在一些实施例中,即使计算出40mm的位移,控制系统112也可以将单次迭代中可用的位移限制为20mm、10mm、5mm或更小。在一些实施例中,限制可以根据执行的迭代次数而改变,使得在稍后的迭代中允许比在先前的迭代中更少的移动。
86.在操作712处,可以使用刚性或非刚性变换来变换每个子集1102,该变换在位移和取向中应用所计算的偏移以特定地移动特定子集1102中的每个点。在一个替代实施例中,
建模数据点可以通过使用刚性或非刚性变换来变换,该变换在位移和取向中应用所计算的偏移以将该组模型点604中的每个点朝向子集1102移动。因此,本公开的一些实施例可以涉及将测量点配准到模型点并移动测量点(包括平移测量点和/或改变其取向)以更好地与模型点对齐,从而将它们带入公共空间或共同参照系。这些配准可以被理解为配准候选者。为了将模型600与测量点1100配准,将模型600带入患者空间中,可以识别和选择最佳配准候选者。
87.在操作714处,评估每个子集1102与匹配的解剖模型点604之间的配准误差。在一些实施例中,可以将误差计算为每个测量点与变换后的其最近模型点之间的累积误差或距离。可替代地,可以表达为与先前计算的配准的取向和位移的变化。这可以包括误差值的计算,包括每个子集1102的取向和位移的误差值。换句话说,可以针对每个匹配的子集1102单独地确定用于取向和位移的误差因子。如果聚合的误差因子大于阈值,则可以重复操作708到714的附加迭代,直到总位置和取向误差因子下降到低于阈值。
88.在操作716处,可以比较每个子集1102的收敛以确定哪个配准候选者对于在依赖于图6a的模型600的程序中使用是最佳的。换句话说,可以比较与每个子集1102a、1102b、1102c和1102d到模型点604的配准候选者相关联的总误差值。具有最小总误差值的配准候选者可用于将模型点604带入收集点1100的患者空间中。模型点604之间的关联可以允许模型600在患者空间中表达。在一些实施例中,在确定每个子集的收敛之后,可以将收敛值与阈值进行比较,并且如果收敛下降到低于阈值或者如果相关联的误差超过阈值,则收集点直到(一个或多个)失败子集中的那个点可以被丢弃。例如,当患者p进行粗略移动时,与一个或多个子集相关联的配准的误差可能包括显著的误差,从而使得配准不能用于图像引导的外科手术。因为子集已经被与患者p的移动相关联的不良数据“污染”,所以可以清空子集并且重新开始点收集。
89.例如,在操作718处,可以在由图1的显示器110提供的图形用户界面中显示模型点604(并且由此模型600)的最佳配准的视觉表示。视觉表示可以描绘与模型600相关的医疗器械系统200。图13a中示出了示例性视觉表示。图13a图示了显示器1300,其基于图6a的解剖模型600在用户界面中显示人肺的解剖通路的渲染。利用如上面在图7中描述的向患者配准的模型空间,导管310的当前形状和远端318的方位可以与通路601的渲染同时定位和显示,通路601包括通路601a和601b。数据点可以通过显示器上的多个点或圆斑在用户界面中可视地表示,或者作为渲染模型(诸如基于该组数据点创建的网格或线模型)可视地表示。在一些实施例中,在已经实现每个处理操作以改变数据点之后,可以在显示器110中刷新视觉表示。图13b图示了视觉表示的另一示例性显示1350,其可被提供给外科医生s以帮助引导手术。图13b从医疗器械200的视角示出了模型600的一部分的内部视图,并且描绘了通路601a和601b的渲染模型。模型600可以被渲染为二维或三维以便于指导手术。
90.本公开的原理和实施例可以通过改善患者解剖结构的模型和在外科手术程序期间在患者解剖结构内操纵的医疗器械的模型之间的配准来改善图像引导的外科手术。可以基于测量数据点的子集产生多个候选配准,并且可以比较多个配准以确定要应用于模型以将其带入患者空间的最佳配准。可以连续地更新这些多个候选配准并且将它们彼此比较以及与阈值比较以确保在任何给定时间的最高保真度配准,作为在图像引导的外科手术中使用所提供的。
91.在一些实施例中,当稍后的配准替换较早的配准或者较早的配准被控制系统112认为可以被稍后的配准替换时,可以通过用户界面向临床医生提供警报以指示存在配准变化(例如,从测量点的一个子集到另一个子集)或者有更好的配准可用。在一些实施例中,控制系统112可以在实施更好配准之前通过用户界面要求临床医生批准。例如,当识别出更好配准时,可以向显示器110呈现警报以及临床医生可以批准或不批准新配准的按钮或其他用户界面元素。然后根据临床医生的决定实施或不实施新配准。
92.本发明的实施例中的一个或多个元件可以用软件实现以在计算机系统(例如控制系统112)的处理器上执行。当以软件实现时,本发明实施例的元件基本上是执行必要任务的代码段。程序或代码段可以存储在非暂时性处理器可读存储介质或设备中,该存储介质或设备包括可以存储信息的任何介质,包括光学介质、半导体介质和磁介质。处理器可读存储设备示例包括:电子电路、半导体器件、半导体存储器器件、只读存储器(rom)、闪速存储器、可擦除可编程只读存储器(eprom)、软盘、cd-rom、光盘、硬盘或其他存储设备。代码段可以通过诸如因特网、内联网等计算机网络下载。如本文所述,访问、收集、分配、检测、启动、配准、显示、接收、生成、确定、移动数据点、分段、匹配等的操作可以至少部分地由控制系统112或其处理器执行。
93.应注意,所呈现的过程和显示器可能不固有地与任何特定计算机或其他设备相关。各种此类系统所需的结构将作为权利要求中的元件出现。另外,不参考任何特定编程语言描述本发明的实施例。应当理解,可以使用各种编程语言来实现如本文所述的本发明的教导。
94.虽然已经在附图中描述和示出了本发明的某些示例性实施例,但是应该理解,这些实施例仅仅是对广泛发明的说明而非限制,并且本发明的实施例不限于所示和所述的具体构造和布置,因为本领域普通技术人员可以想到各种其他修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1