一种用于骨盆骨折复位的机械臂系统的制作方法
1.本发明涉及机械臂领域,特别是涉及一种用于骨盆骨折复位的机械臂系统。
背景技术:
2.随着人们健康意识的加重,越来越多人喜欢上了户外运动,生活中常见且成本较低的运动有跑步、滑板、轮滑、骑行等,由于这些运动有一定的危险性,所以每年因此摔倒骨折的人数也在不断增加;
3.人体可能出现骨折的部位有很多,对人体的损伤程度也不同,而骨盆骨折是较为严重的损伤,具有高致残率、高死亡率,半数以上的骨盆骨折伴有并发症和多发伤,严重威胁伤病员生命;
4.当前骨盆骨折的治疗方法为医生在ct的辅助下手动复位,然后通过螺钉固定,但如此医生需要长时间暴露在辐射环境下,严重影响医生的身体健康,因此我们提出一种用于骨盆骨折复位的机械臂系统来解决问题。
技术实现要素:
5.1.要解决的技术问题
6.针对现有技术中存在的问题,本发明的目的在于提供一种用于骨盆骨折复位的机械臂系统,本方案通过智能系统和机械臂配合工作,对骨折处进行复位,无需人工参入,避免医护人员长时间暴露在辐射环境下,影响身体健康,同时通过系统程序控制的机械臂,操控精度更高,发力更加平稳,手术效果更好;而通过在操控臂和固定件之间安装调节件,若汇集处操控臂阻挡了螺钉植入设备工作,则调节件偏转,如此螺钉植入设备可以从调节件弯曲部分穿过,从而只对阻碍部分进行调整,使多个设备之间的变化幅度降为最小,对手术的影响降到最弱,避免一个操控臂移动,其他操控臂也需对应调整,无需重新规划所有机械臂工作姿态,以此来减少主机运算强度,调整更加迅速。
7.2.技术方案
8.为解决上述问题,本发明采用如下的技术方案。
9.一种用于骨盆骨折复位的机械臂系统,包括三维ct导入模块、ct扫描设备、导航系统、反光球系统、显示器、智能主机、模拟模块、螺钉植入设备、复位螺钉、机械臂,所述机器臂的一端设置地盘小车,所述三维ct导入模块与智能主机电连接,所述ct扫描设备与导航系统电连接,所述导航系统内置跟踪器,所述显示器安装在智能主机正面,所述复位螺钉与反光球系统固定连接,所述螺钉植入设备、电动机械臂与智能主机电连接;通过智能系统和机械臂配合工作,对骨折处进行复位,无需人工参入,避免医护人员长时间暴露在辐射环境下,影响身体健康,同时通过系统程序控制的机械臂,操控精度更高,发力更加平稳,手术效果更好;机器臂的另一端安装操控臂和固定件,所述固定件用于螺钉,所述操控臂和固定件之间转动安装有调节件,所述调节件呈弯曲状,且弯曲部分内径大于螺钉植入设备安装螺钉端的直径,调节件与操控臂之间设置驱动电机,控制调节件转动,电机内有自锁机构,防
止外力让调节件转动,所述操控臂与调节件的底部均开设有安装凹槽,所述调节件与固定件的顶部均固定连接有安装凸块,机械壁牵引骨块复位后,螺钉植入设备打入螺钉,将碎裂的骨块固定一起,由于多个会在骨折处汇集工作,若汇集处操控臂正好位于螺钉植入设备工作轨迹上,阻挡了螺钉植入设备工作,则通过驱动电机带动调节件偏转一定角度,如此螺钉植入设备可以从调节件弯曲部分穿过,这只对阻碍部分局部调整,使设备变化幅度降为最小,对手术的影响降到最弱,避免一个操控臂移动,其他操控臂也需对应调整,无需重新规划所有机械臂工作姿态,这样减少了智能主机运算强度,调整更加迅速,所述操控臂、固定件和调节件的轴心处开设贯穿槽,所述贯穿槽贯穿调节件,并在调节件的内弯上留出两个孔洞,上方所述安装凹槽的内顶壁嵌有延伸到贯穿槽内的伸缩杆,所述伸缩杆的伸缩长度大于贯穿槽,调节件调整前,伸缩杆伸长将固定件与操控臂固定到一条直线上,如此防止调节件转动时,固定件失去借力点,对骨块的约束力减弱,影响骨块的复位精度,调节件调整完毕后,伸缩杆收缩将调节件的弯曲部分空出,不影响螺钉植入设备的使用。
10.进一步的,所述反光系统包括四个反光球,所述机械壁有四台,工作时互相配合,多台机械壁同步工作将破碎的骨块汇集,修复效果更好。
11.进一步的,所述调节件与操控臂、固定件连接处的外侧均包裹密封条,防止异物进入,使所述调节件的转动始终保持灵活,所述操控臂能够伸缩,调节工作范围。
12.进一步的,所述安装凸块和操控臂之间设置锁定机构,所述锁定机构包括开设在上方安装凸块外侧的环槽,所述安装凹槽的内壁上固定连接固定齿环,所述固定齿环位于环槽内,所述环槽和贯穿槽之间开设插槽,所述插槽环绕伸缩杆分布,插槽内插接插杆,所述插杆两端均延伸处插槽,插杆延伸进环槽的一端安装连接块,所述连接块的另一侧安装卡齿,所述伸缩杆的外侧开设控制槽,所述插杆的套接复位弹簧,调节件调整时,伸缩杆为收缩状态,控制槽高度与插杆对应,卡齿与固定齿环保持距离,操控臂和调节件之间可以自由转动,调节件调整完毕后,伸缩杆上移推动卡齿与固定齿环卡合,如此操控臂和调节件之间便被固定,这样牵引骨块复位时作用在调节件和操控臂之间的力大部分由卡齿和固定齿环承担,减小了自锁机构的负担,延长了使用寿命,同时设备运行也更加稳定。
13.进一步的,所述卡齿的大小与固定齿环的齿间距对应,使卡齿和固定齿环可以完美卡合,不会出现晃动,保证了调节件固定的稳定,所述复位弹簧一端连接环槽槽底壁,另一端连接连接块。
14.进一步的,所述控制槽的两侧设置导向斜面,所述插槽延伸到控制槽内,插杆延伸入控制槽的一端设置圆弧面,使插杆可以更方便的进出控制槽。
15.进一步的,所述锁定机构还包括开设在连接块内的环形槽,所述环形槽内部滑动连接滑杆,所述连接块靠近固定件的一端开设滑动开口,所述滑动开口的宽度大于卡齿,所述卡齿与滑杆固定连接,所述连接块靠近插杆的一端开设连接槽,所述连接槽的槽底壁开设贯穿环形槽的阻断槽,所述插杆靠近连接块的一端固定连接阻断块,所述阻断块的外侧套接阻断弹簧,插杆推动连接块和卡齿靠近固定齿环时,如此卡齿与固定齿环上的齿没有正好配对,卡齿向一侧偏移,直至使其达到与固定齿环完美卡合,随后阻断块隔断环形槽,滑杆两端空间独立无法在移动,卡齿也被锁死,如此调节件在任意角度停止固定,都能实现卡齿和固定齿环完美卡合,使设备的调节精度更好,使用更加方便,自由度更高,避免指定固定角度带来的调节误差。
16.进一步的,所述卡齿呈三角形,卡齿滑动连接在滑动开口内,且向两侧滑动距离与固定齿环齿间距相同,达到完美卡合的目的,所述复位弹簧拉伸所需的力小于阻断弹簧压缩所需的力,使复位弹簧先被拉伸通过连接块推动卡齿靠近固定齿环,待完全卡合后,阻断弹簧再被压缩,阻断块插进阻断槽隔断环形槽,将滑杆锁死,如此使各部件可以按指定顺序工作,提高了设备运行的稳定性。
17.进一步的,所述滑杆的两端设置密封环,使环形槽两端封闭,所述环形槽的内侧填充液体挤压物,液体挤压物可以是液压油、润滑油,由于这些液体流动性好且分子间距小,如此在挤压时,减少能量在传输过程中的损坏,也避免挤压物体积被压缩变小,影响卡齿和固定齿环卡合的稳定性,所述控制槽的深度大于连接块到固定齿环的距离,在连接块与固定齿环贴合后,插杆仍可向连接槽内移动。
18.进一步的,所述阻断槽的直径大于环形槽的直径,所述阻断块延伸进环形槽内,阻断块的形状、大小均与阻断槽对应,可以完全阻断i环形槽,所述阻断块一端连接插杆,另一端连接连接槽槽底壁,所述插杆延伸进连接槽内。
19.3.有益效果
20.相比于现有技术,本发明的优点在于:
21.(1)本方案通过智能系统和机械臂配合工作,对骨折处进行复位,无需人工参入,避免医护人员长时间暴露在辐射环境下,影响身体健康,同时通过系统程序控制的机械臂,操控精度更高,发力更加平稳,手术效果更好。
22.(2)通过在操控臂和固定件之间安装调节件,机械壁牵引骨块复位后,螺钉植入设备打入螺钉,将碎裂的骨块固定一起,由于多个会在骨折处汇集工作,若汇集处操控臂正好位于螺钉植入设备工作轨迹上,阻挡了螺钉植入设备工作,则通过驱动电机带动调节件偏转一定角度,如此螺钉植入设备可以从调节件弯曲部分穿过,这只对阻碍部分局部调整,使设备变化幅度降为最小,对手术的影响降到最弱,避免一个操控臂移动,其他操控臂也需对应调整,无需重新规划所有机械臂工作姿态,这样减少了智能主机运算强度,调整更加迅速。
23.(3)导航系统的跟踪器实时跟踪反光系统,并在显示器实时显示骨盆的三维仿真图,这样如果手术中患者移动或手术床移动,使骨折块位置出现偏移使,系统可以立即捕捉骨折块的新位置,重新规划手术路径,提高了设备的智能效果和安全性。
24.(4)通过智能系统和机械臂配合工作,对骨折处进行复位,无需人工参入,避免医护人员长时间暴露在辐射环境下,影响身体健康,同时通过系统程序控制的机械臂,操控精度更高,发力更加平稳,手术效果更好。
25.(5)通过设置贯穿操控臂、固定件和调节件的伸缩杆,调节件调整前,伸缩杆伸长将固定件与操控臂固定到一条直线上,如此防止调节件转动时,固定件失去借力点,对骨块的约束力减弱,影响骨块的复位精度,调节件调整完毕后,伸缩杆收缩将调节件的弯曲部分空出,不影响螺钉植入设备的使用。
26.(6)通过卡齿和固定齿环的配合,调节件调整时,伸缩杆为收缩状态,控制槽高度与插杆对应,卡齿与固定齿环保持距离,操控臂和调节件之间可以自由转动,调节件调整完毕后,伸缩杆上移推动卡齿与固定齿环卡合,如此操控臂和调节件之间便被固定,这样牵引骨块复位时作用在调节件和操控臂之间的力大部分由卡齿和固定齿环承担,减小了自锁机
构的负担,延长了使用寿命,同时设备运行也更加稳定。
27.(7)卡齿的大小与固定齿环的齿间距对应,使和固定齿环可以完美卡合,不会出现晃动,保证了调节件固定的稳定。
28.(8)通过控制卡齿的状态,插杆推动连接块和卡齿靠近固定齿环时,如此卡齿与固定齿环上的齿没有正好配对,卡齿向一侧偏移,直至使其达到与固定齿环完美卡合,随后阻断块隔断环形槽,滑杆两端空间独立无法在移动,卡齿也被锁死,如此调节件在任意角度停止固定,都能实现卡齿和固定齿环完美卡合,使设备的调节精度更好,使用更加方便,自由度更高,避免指定固定角度带来的调节误差。
29.(9)复位弹簧拉伸所需的力小于阻断弹簧压缩所需的力,使复位弹簧先被拉伸通过连接块推动卡齿靠近固定齿环,待完全卡合后,阻断弹簧再被压缩,阻断块插进阻断槽隔断环形槽,将滑杆锁死,如此使各部件可以按指定顺序工作,提高了设备运行的稳定性。
30.(10)环形槽的内侧填充液体挤压物,液体挤压物可以是液压油、润滑油,由于这些液体流动性好且分子间距小,如此在挤压时,减少能量在传输过程中的损坏,也避免挤压物体积被压缩变小,影响卡齿和固定齿环卡合的稳定性。
附图说明
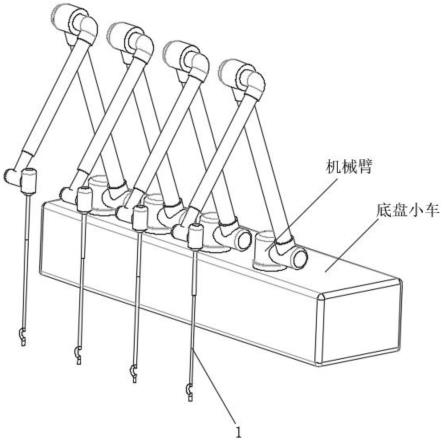
31.图1为本发明的机械臂示意图;
32.图2为本发明的调节件调节前展示图;
33.图3为本发明的调节件内部展示图;
34.图4为本发明的调节件调节时展示图;
35.图5为本发明的调节件调节后展示图;
36.图6为本发明的操控臂和调节件连接处展示图;
37.图7为本发明的固定齿环和卡齿卡合前展示图;
38.图8为本发明的连接块内部展示图;
39.图9为本发明的固定齿环和卡齿卡合后展示图;
40.图10为本发明的卡齿锁死状态图;
41.图11为本发明图7中连接块内部状态图;
42.图12为本发明图9中连接块内部状态图;
43.图13为本发明图10中连接块内部状态图。
44.图中标号说明:
45.1、操控臂;2、固定件;3、调节件;4、安装凹槽;5、安装凸块;6、贯穿槽;7、伸缩杆;8、锁定机构;81、环槽;82、固定齿环;83、插槽;84、插杆;85、连接块;86、卡齿;87、控制槽;88、滑杆;89、滑动开口;810、连接槽;811、阻断槽;812、阻断块;813、阻断弹簧;814、复位弹簧;815、环形槽。
具体实施方式
46.本实施例将结合公开的附图,对技术方案进行清楚、完整地描述,使本公开实施例的目的、技术方案和有益效果更加清楚。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性
劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
47.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属技术人员所理解的常规意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“上”、“下”、“内”、“外”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
48.实施例:
49.请参阅图1,一种用于骨盆骨折复位的机械臂系统,包括三维ct导入模块、ct扫描设备、导航系统、反光球系统、显示器、智能主机、模拟模块、螺钉植入设备、复位螺钉、机械臂,所述机器臂的一端设置地盘小车,所述三维ct导入模块与智能主机电连接,所述ct扫描设备与导航系统电连接,所述导航系统内置跟踪器,所述显示器安装在智能主机正面,所述复位螺钉与反光球系统固定连接,所述螺钉植入设备、电动机械臂与智能主机电连接;通过智能系统和机械臂配合工作,对骨折处进行复位,无需人工参入,避免医护人员长时间暴露在辐射环境下,影响身体健康,同时通过系统程序控制的机械臂,操控精度更高,发力更加平稳,手术效果更好。
50.一种用于骨盆骨折复位的机械臂系统,工作步骤如下:
51.s1、根据术前影像资料分析骨盆骨折类型及稳定情况,并通过三维ct导入模块将影像输入智能主机,通过显示屏显示;
52.s2、患者躺在骨科手术床,如果患者有骶髂关节垂直移位,做双侧下肢牵引,纠正骶髂关节的垂直移位;然后通过螺钉植入设备在骨盆的主要骨折块上均置入一枚螺钉,每枚螺钉上固定反光球系统,标记每块主要骨折块的位置;
53.s3、手术中利用ct扫描设备进行骨盆ct扫描,根据反光系统在ct图像中的标记,导航系统将图像骨盆与空间骨盆进行注册匹配;
54.s4、导航系统的跟踪器实时跟踪反光系统,并在显示器实时显示骨盆的三维仿真图,这样如果手术中患者移动或手术床移动,使骨折块位置出现偏移使,系统可以立即捕捉骨折块的新位置,重新规划手术路径,提高了设备的智能效果和安全性;
55.s5、通过螺钉植入设备在骶骨两边各置入一枚螺钉,螺钉各由一机械臂(手动锁定)固定在手术床边;
56.s6、模拟模块根据掌握的全部信息,进行骨盆骨折的模拟复位,复位过程及效果通过显示屏三维仿真显示,这样可以手术方案的成功率和治疗效果有个初步评判,同时也可以通过观察三维仿真显示影像,发现手术过程中可能出现的问题,及时调整,保障了手术安全,提高了手术效果;
57.s7、利用螺钉植入设备在骨盆每一块主要骨折块上再加一枚螺钉(每一骨折块上均置入两枚螺钉),机械臂分别夹持每一个骨折块上的两枚螺钉,通过机械臂的运动带动骨折块进行复位;
58.s8、在导航系统的引导下进行通道螺钉的固定。
59.所述反光系统包括四个反光球,四个反光点,使空间位置的判断更加准确,所述机械壁有四台,工作时互相配合,多台机械壁同步工作将破碎的骨块汇集,修复效果更好。
60.请参阅图1-5,机器臂的另一端安装操控臂1和固定件2,固定件2用于螺钉,操控臂1和固定件2之间转动安装有调节件3,调节件3成弯曲状,且弯曲部分内径大于螺钉植入设备安装螺钉端的直径,调节件3与操控臂1之间设置驱动电机,控制调节件3转动,电机内有自锁机构,防止外力让调节件3转动,操控臂1与调节件3的底部均开设有安装凹槽4,调节件3与固定件2的顶部均固定连接有安装凸块5,操控臂1、固定件2和调节件3的轴心处开设贯穿槽6,贯穿槽6贯穿调节件3,并在调节件3的内弯上留出两个孔洞,上方安装凹槽4的内顶壁嵌有延伸到贯穿槽6内的伸缩杆7,伸缩杆7的伸缩长度大于贯穿槽6。
61.机械臂牵引骨块复位后,螺钉植入设备打入螺钉,将碎裂的骨块固定一起,由于多个1会在骨折处汇集工作,若汇集处操控臂1正好位于螺钉植入设备工作轨迹上,阻挡了螺钉植入设备工作,则伸缩杆7伸长将固定件2与操控臂1固定到一条直线上,如图2所示,再通过驱动电机带动调节件3偏转一定角度,如图4所示,调节件3调整完毕后,伸缩杆7收缩将调节件3的弯曲部分空出,如图5所示,调节件3与操控臂1、固定件2连接处的外侧均包裹密封条,防止异物进入,使调节件3的转动始终保持灵活,操控臂1能够伸缩,调节工作范围。
62.请参阅图6-8,安装凸块5和操控臂1之间设置锁定机构8,锁定机构8包括开设在上方安装凸块5外侧的环槽81,安装凹槽4的内壁上固定连接固定齿环82,固定齿环82位于环槽81内,环槽81和贯穿槽6之间开设插槽83,插槽83环绕伸缩杆7分布,插槽83内插接插杆84,插杆84两端均延伸处插槽83,插杆84延伸进环槽81的一端安装连接块85,连接块85的另一侧安装卡齿86,伸缩杆7的外侧开设控制槽87,插杆84的套接复位弹簧814,调节件3调整时,伸缩杆7为收缩状态,控制槽87高度与插杆84对应,复位弹簧814将插杆84推压在控制槽87在,卡齿86与固定齿环82保持距离,如图7所示,操控臂1和调节件3之间可以自由转动,调节件3调整完毕后,伸缩杆7上移,其两端的斜面将插杆84推出控制槽87,控制槽87通过连接块85推动卡齿86与固定齿环82卡合,如图9所示,如此操控臂1和调节件3之间便被固定,这样牵引骨块复位时作用在调节件3和操控臂1之间的力大部分由卡齿86和固定齿环82承担。
63.卡齿86的大小与固定齿环82的齿间距对应,使86和固定齿环82可以完美卡合,不会出现晃动,保证了调节件3固定的稳定,复位弹簧814一端连接环槽81槽底壁,另一端连接连接块85;控制槽87的两侧设置导向斜面,插槽83延伸到控制槽87内,插杆84延伸入控制槽87的一端设置圆弧面,使插杆84可以更方便的进出控制槽87。
64.请参阅图9-13,锁定机构8还包括开设在连接块85内的环形槽815,环形槽815内部滑动连接滑杆88,连接块85靠近固定件2的一端开设滑动开口89,滑动开口89的宽度大于卡齿86,卡齿86与滑杆88固定连接,连接块85靠近插杆84的一端开设连接槽810,连接槽810的槽底壁开设贯穿环形槽815的阻断槽811,插杆84靠近连接块85的一端固定连接阻断块812,阻断块812的外侧套接阻断弹簧813,插杆84移动前,如图11所示,插杆84推动连接块85和卡齿86靠近固定齿环82时,如图12所示,如此卡齿86与固定齿环82上的齿没有正好配对,则固定齿环82推动卡齿86带动滑杆88向一侧偏移,卡齿86进入固定齿环82内侧两个齿牙之间,直至使其达到与固定齿环82完美卡合,卡合后连接块85无法在移动,而插杆84仍在被推动,如图13所示,插杆84压缩阻断弹簧813进入连接槽810,阻断块812也移动进入阻断槽811如此阻断块812将环形槽815隔断,滑杆88两端空间独立无法在移动,卡齿86也被锁死,如此调节件3在任意角度停止固定,都能实现卡齿86和固定齿环82完美卡合。
65.卡齿86成三角形,卡齿86滑动连接在滑动开口89内,且向两侧滑动距离与固定齿
环82齿间距相同,达到完美卡合的目的,复位弹簧814拉伸所需的力小于阻断弹簧813压缩所需的力,使复位弹簧814先被拉伸通过连接块85推动卡齿86靠近固定齿环82,待完全卡合后,阻断弹簧813再被压缩,阻断块812插进阻断槽811隔断环形槽815,将滑杆88锁死,如此使各部件可以按指定顺序工作,提高了设备运行的稳定性;滑杆88的两端设置密封环,使环形槽815两端封闭,环形槽815的内侧填充液体挤压物,液体挤压物可以是液压油、润滑油,由于这些液体流动性好且分子间距小,如此在挤压时,减少能量在传输过程中的损坏,也避免挤压物体积被压缩变小,影响卡齿86和固定齿环82卡合的稳定性,控制槽87的深度大于连接块85到固定齿环82的距离,在连接块85与固定齿环82贴合后,插杆84仍可向连接槽810内移动;阻断槽811的直径大于环形槽815的直径,阻断块812延伸进环形槽815内,阻断块812的形状、大小均与阻断槽811对应,可以完全阻断i环形槽815,阻断块812一端连接插杆84,另一端连接连接槽810槽底壁,插杆84延伸进连接槽810内。
66.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1