一种内镜导航系统
1.本技术属于医疗辅助技术领域,尤其涉及一种内镜导航系统。
背景技术:
2.胆道、支气管、输尿管肾盂等人体管道结构通常呈树枝状分叉结构,病变通常位于树枝状分叉的某一细小分支。内镜技术的发展,为无需切开人体组织,仅从胆道、支气管、输尿管肾盂等自然腔道来进行此类器官的疾病诊疗提供了可能性。使用内镜器械正确的通过多重分叉路口最终到达病灶,是非常重要的一步。然而,不同的树枝状分叉结构的分叉处,其在内镜的视图下并无特殊的可供识别的方向分辨信息。因此,在内镜下走形在正确分叉路径上最终顺利到达目标病灶常常依靠经验判断与反复的路径尝试。而人体胆道、支气管、输尿管肾盂等结构的组织十分柔软、敏感,反复的内镜路径尝试容易损伤这些结构的黏膜,严重者可能导致这些管道的组织撕裂、破裂,发生出血甚至内瘘,带来严重的并发症。
3.可见,急需一种能够对内镜在分叉口处的行进方向进行导航的系统。
技术实现要素:
4.本技术实施例提供了一种内镜导航系统,可以解决由于内镜反复进行路径尝试,容易造成组织器官损伤的问题。
5.本技术实施例提供了一种内镜导航系统,包括:内镜设备,内镜设备的头端内设有目标定位芯片;用于承载目标对象的手术床,目标对象的多个解剖位置处均设有体表标贴,体表标贴内设有辅助定位芯片,手术床上设置有多个探测装置;显示器;处理器,处理器分别与内镜设备、探测装置和显示器连接,处理器用于:以手术室中的任一点为原点构建坐标系;根据探测装置探测到的第一信号,确定多个辅助定位芯片在坐标系中的位置;第一信号为多个辅助定位芯片发射的信号;将预先构建的目标对象的三维重建模型转换至坐标系下;三维重建模型中与解剖位置对应的位置,与该解剖位置在坐标系中的位置重合;根据探测装置探测到的第二信号,确定目标定位芯片在坐标系中的位置,并通过显示器显示坐标系、三维重建模型和目标定位芯片在坐标系中的位置;第二信号为目标定位芯片发射的信号;根据内镜设备在头端进入目标对象体内、且到达目标部位分叉口处时,对分叉口进行图像采集得到的真实图像,以及通过虚拟相机对三维重建模型中与分叉口对应的位置处进行图像采集得到虚拟图像,确定并通过显示器显示内镜设备在分叉口处的行进方向。
6.可选的,内镜设备的头端内还设有陀螺仪,陀螺仪与处理器连接。
7.可选的,目标定位芯片和辅助定位芯片均包括:第一外壳,以及设置于第一外壳内
的射频芯片和天线,且射频芯片与天线连接。
8.可选的,射频芯片的横截面的直径为2至4毫米,射频芯片的高度为9至10毫米。
9.可选的,手术床包括:可升降床柱;用于承载目标对象的床板,床板设置于可升降床柱升降端的顶部;l形支架框,l形支架框的底端与可升降床柱的底座连接,l形支架框的顶端水平框位于床板的上方,顶端水平框的每个顶点设有一探测装置,顶端水平框上相互平行的第一侧边和第二侧边均为导轨;设置于第一侧边上的第一运动滑轮;设置于第二侧边上的第二运动滑轮;可滑动导轨,可滑动导轨的一端与第一运动滑轮的纵杆连接,另一端与第二运动滑轮的纵杆连接;设置于可滑动导轨上的第三运动滑轮,第三运动滑轮的纵杆上设有激光器;第一运动滑轮的驱动电机、第二运动滑轮的驱动电机以及第三运动滑轮的驱动电机均与处理器连接,处理器还用于:根据目标定位芯片在坐标系中的位置,对第一运动滑轮的驱动电机的运动量、第二运动滑轮的驱动电机的运动量以及第三运动滑轮的驱动电机的运动量进行控制,使激光器的激光束垂直指向目标对象体内的目标定位芯片。
10.可选的,体表标贴包括第二外壳以及设置于第二外壳底面的胶贴,辅助定位芯片通过芯片固定锚设置于第二外壳内。
11.可选的,探测装置包括底座、设置于底座上的球形外壳、设置于球形外壳内的信号收发机,以及设置于底座上的收发天线,收发天线分别与信号收发机和处理器连接。
12.可选的,处理器还用于根据待检查目标在目标部位的位置,在三维重建模型中规划内镜设备到达待检查目标的导航路径。
13.可选的,处理器在根据真实图像以及虚拟图像,确定并通过显示器显示内镜设备在分叉口处的行进方向时,处理器具体用于:将虚拟图像与真实图像进行图像配准,得到配准图像;将导航路径在配准图像中的行进方向,作为内镜设备在分叉口处的行进方向,并通过显示器显示配准图像。
14.可选的,处理器在通过显示器对目标定位芯片在坐标系中的位置进行显示时,处理器具体用于对目标定位芯片在坐标系中的位置进行突出处理,并通过显示器对目标定位芯片在坐标系中的位置进行突出显示。
15.本技术的上述方案有如下的有益效果:在本技术的实施例中,内镜导航系统通过处理器为手术床构建坐标系,将预先构建的三维重建模型转换至该坐标系下,并在显示器中显示该三维重建模型以及内镜头端在该三维重建模型的位置,同时在内镜设备到达分叉口处时,通过处理器确定显示内镜设备在分叉口处的行进方向,并在显示器中显示内镜设备在分叉口处的行进方向,实现内镜设备在分叉口处的导航。
16.本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
附图说明
17.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本技术一实施例提供的内镜导航系统的结构示意图;图2为本技术一实施例提供的体表标贴的结构示意图一;图3为本技术一实施例提供的体表标贴的结构示意图二;图4为本技术一实施例提供的定位芯片的结构示意图一;图5为本技术一实施例提供的定位芯片的结构示意图二;图6为本技术一实施例提供的探测装置的结构示意图一;图7为本技术一实施例提供的探测装置的结构示意图二;图8为本技术一实施例提供的辅助定位芯片与各探测装置的位置关系示意图;图9为本技术一实施例提供的内镜设备在目标对象体内采集真实图像的示意图;图10为本技术一实施例提供的虚拟相机在三维重建模型中采集虚拟图像的示意图;图11为本技术一实施例提供的内镜设备与内陀螺仪与目标定位芯片排布示意图;图12为图1中a处的局部放大图;图13为图1中b处的局部放大图;图14为本技术一实施例提供的手术床的局部图一;图15为本技术一实施例提供的手术床的局部图二。
19.【附图标记说明】10、内镜设备;101、陀螺仪;102、目标定位芯片;20、手术床;201、可升降床柱;202、床板;203、l形支架框;204、第一侧边;205、第二侧边;206、第一运动滑轮;2061、纵杆;207、可滑动导轨;208、激光器;209、第三运动滑轮;2091、驱动电机;2092、传动齿轮;30、显示器;40、处理器;50、探测装置;501、底座;502、球形外壳;503、信号收发机;504、收发天线;60、体表标贴;601、第二外壳;602、辅助定位芯片;603、芯片固定锚;604、胶贴;70、定位芯片;701、第一外壳;702、射频芯片;703、天线;80、目标部位;81、待检查目标;82、导航路径。
具体实施方式
20.以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本技术实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本技术。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本技术的描述。
21.应当理解,当在本技术说明书和所附权利要求书中使用时,术语“包括”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
22.还应当理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
23.如在本技术说明书和所附权利要求书中所使用的那样,术语“如果”可以依据上下文被解释为“当...时”或“一旦”或“响应于确定”或“响应于检测到”。类似地,短语“如果确定”或“如果检测到[所描述条件或事件]”可以依据上下文被解释为意指“一旦确定”或“响应于确定”或“一旦检测到[所描述条件或事件]”或“响应于检测到[所描述条件或事件]”。
[0024]
另外,在本技术说明书和所附权利要求书的描述中,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0025]
在本技术说明书中描述的参考“一个实施例”或“一些实施例”等意味着在本技术的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书中的不同之处出现的语句“在一个实施例中”、“在一些实施例中”、“在其他一些实施例中”、“在另外一些实施例中”等不是必然都参考相同的实施例,而是意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
[0026]
目前由于内镜需要反复进行路径尝试才能到达目标病灶,因此在此过程中容易损伤组织器官。
[0027]
针对上述问题,本技术实施例提供了一种内镜导航系统,该内镜导航系统通过处理器为手术床构建坐标系,将预先构建的三维重建模型转换至该坐标系下,并在显示器中显示该三维重建模型以及内镜头端在该三维重建模型的位置,同时在内镜设备到达分叉口处时,通过处理器确定显示内镜设备在分叉口处的行进方向,并在显示器中显示内镜设备在分叉口处的行进方向,实现内镜设备在分叉口处的导航。
[0028]
下面结合具体实施例对本技术提供的内镜导航系统进行示例性的说明。
[0029]
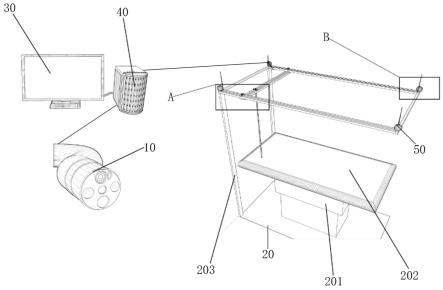
如图1所示,本技术的实施例提供了一种内镜导航系统,该内镜导航系统包括:内镜设备10、用于承载目标对象的手术床20、显示器30和处理器40(在图1中处理器位于与显示器连接的主机设备内)。
[0030]
其中,内镜设备10的头端内设有目标定位芯片,手术床20上设置有多个探测装置50,位于手术床20上的目标对象的多个解剖位置处均设有体表标贴,该体表标贴内设有辅助定位芯片,处理器40分别与内镜设备10(图中仅示意了处理器与1个探测装置的连接关系)、各探测装置50和显示器30连接。
[0031]
在本技术的一些实施例中,上述目标对象可以为需通过内镜进行相关部位检查的人员,上述多个解剖位置与该人员需检查的部位相关,例如,当需检查的部位为支气管时,上述多个解剖位置可以为该人员体表“剑突”、“髂前上棘”等位置。
[0032]
在本技术的一些实施例中,为便于将体表标贴设置于目标对象的解剖位置处,如图2至图3所示,上述体表标贴包括第二外壳601以及设置于第二外壳601底面的胶贴604,辅助定位芯片602通过芯片固定锚603设置于第二外壳601内。
[0033]
示例性的,在本技术的一些实施例中,上述第二外壳可以为聚氯乙烯(pvc)医用外壳,上述胶贴可以为由抗过敏生物粘胶制成的双面胶。
[0034]
在本技术的一些实施例中,上述目标定位芯片主要用于以一定频率发射信号,以使探测装置在接收到该信号以及信号强度后,将信号强度传输给处理器,进而使处理器计算确定该目标定位芯片的位置。
[0035]
与目标定位芯片类似的,上述辅助定位芯片也主要用于以一定频率发射信号,以
使探测装置在接收到该信号以及信号强度后,将信号强度传输给处理器,进而使处理器计算确定该辅助定位芯片的位置。需要说明的是,上述目标定位芯片与各辅助定位芯片所发射的信号的频率不同,从而使得处理器能通过频率对接收到的各信号强度进行区分,分别确定目标定位芯片以及各辅助定位芯片的位置。
[0036]
在本技术的一些实施例中,上述目标定位芯片和辅助定位芯片的结构是相同的,只是发射的信号频率不同。在此为便于结合附图对二者的结构进行说明,将目标定位芯片和辅助定位芯片统称为定位芯片。具体的,如图4至图5所示,该定位芯片70包括:第一外壳701,以及设置于第一外壳701内的射频芯片702和天线703,且射频芯片702与天线703连接。其中,该天线703可以具体为金属天线板。
[0037]
其中,上述第一外壳可以为pvc医用外壳,上述射频芯片主要用于发射信号,并将信号通过天线传输给探测装置。作为一个可选的示例,上述射频芯片的横截面的直径可以为2至4毫米,该射频芯片的高度可以为9至10毫米。当然可以理解的是,目标定位芯片和各辅助定位芯片所发射的信号频率各不相同。
[0038]
在本技术的一些实施例中,上述多个探测装置用于探测目标定位芯片和辅助定位芯片发送的信号及信号强度,以便处理器根据对应的信号强度确定目标定位芯片和辅助定位芯片的位置。
[0039]
具体的,如图6至图7所示,上述探测装置50包括底座501、设置于底座501上的球形外壳502、设置于球形外壳502内的信号收发机503,以及设置于底座501上的收发天线504,收发天线504分别与信号收发机503和处理器连接。
[0040]
其中,上述信号收发机主要用于:通过收发天线接收目标定位芯片和各辅助定位芯片所发射的信号及信号强度,并通过收发天线将接收到的信号及信号强度传输给处理器。
[0041]
上述处理器用于执行以下行为(即步骤一至步骤五)来实现导航:步骤一,以手术室中的任一点为原点构建坐标系。
[0042]
在本技术的一些实施例中,如图1所示,上述手术床20包括:可升降床柱201、用于承载目标对象的床板202以及l形支架框203。其中,床板202设置于可升降床柱201升降端的顶部,l形支架框203的底端与可升降床柱201的底座连接,l形支架框203的顶端水平框位于床板202的上方,顶端水平框的每个顶点设有一探测装置50。在实际应用中,可通过可升降床柱201的控制端(如控制开关)控制可升降床柱201的升降,从而使床板202在一适当的高度。
[0043]
在本技术的一些实施例中,处理器在构建上述坐标系时,可以以手术室中任一探测装置坐在位置为原点构建坐标系。
[0044]
步骤二,根据探测装置探测到的第一信号(该第一信号为多个辅助定位芯片发射的信号),确定多个辅助定位芯片在坐标系中的位置。
[0045]
在本技术的一些实施例中,为便于描述,将手术床上的4个探测装置分别记为p
m-a
、p
m-b
、p
m-c
、p
m-d
,将以p
m-a
所在位置为原点o构建的坐标系的三个坐标轴分别记为x轴、y轴、z轴,假设辅助定位芯片在该坐标系下的坐标为(x1,y1,z1),l形支架框的顶端水平框为正方形框。基于此,针对上述多个辅助定位芯片中的每个辅助定位芯片,确定该辅助定位芯片在坐标系中的位置的具体过程可以为:首先,如图8所示,分别计算p
m-a
、p
m-b
、p
m-c
、p
m-d
与辅助定
位芯片之间的距离,其中,p
m-a
与辅助定位芯片之间的距离为,p
m-b
与辅助定位芯片之间的距离为,p
m-c
与辅助定位芯片之间的距离为,p
m-d
与辅助定位芯片之间的距离为;然后联合求解下列四个方程,解出辅助定位芯片的坐标值(x1,y1,z1):):):):其中,距离为p
m-a
、p
m-b
、p
m-c
、p
m-d
中相邻两探测装置之间的距离,、、以及的求解过程类似。为避免过多重复,在此以为例对辅助定位芯片与探测装置之间的距离计算方式进行示例性说明:,rssi为p
m-a
接收到的信号强度(该信号强度是辅助定位芯片发射的),a为辅助定位芯片和p
m-a
相距1m时的信号强度,n为环境衰减因子。
[0046]
步骤三,将预先构建的目标对象的三维重建模型转换至坐标系下。
[0047]
其中,在上述坐标系中,针对上述多个解剖位置中的每个解剖位置,三维重建模型中与该解剖位置对应的位置,与该解剖位置在坐标系中的位置重合,从而使三维重建模型在坐标系中与手术床的相对位置,与现实中目标对象与手术床的相对位置一致,进而确保后续导航的准确性。
[0048]
在本技术的一些实施例中,可以预先根据目标对象的电子计算机断层扫描(ct)数据构建目标对象的三维重建模型,在将该三维重建模型转移至上述坐标系的过程中,需要移动旋转三维重建模型,直至该三维重建模型中与解剖位置对应的位置,与该解剖位置在坐标系中的位置重合。
[0049]
步骤四,根据探测装置探测到的第二信号(该第二信号为目标定位芯片发射的信号),确定目标定位芯片在坐标系中的位置,并通过显示器显示坐标系、三维重建模型和目标定位芯片在坐标系中的位置。
[0050]
在本技术的一些实施例中,确定目标定位芯片在坐标系中的位置的具体过程,与确定辅助定位芯片在坐标系中的位置的具体过程相同,因此为避免过多重复,在此不再对该过程进行赘述。
[0051]
在本技术的一些实施例中,在确定出目标定位芯片在坐标系中的位置后,可在显示器中显示上述坐标系、上述三维重建模型以及目标定位芯片的位置。需要说明的是,由于三维重建模型与目标定位芯片的位置在同一坐标系下,因此显示器能实时显示出目标定位芯片在三维重建模型中的位置,该位置即为内镜设备的头端在目标对象体内的位置,从而使得操作人员能通过显示器清楚内镜设备在目标对象体内的具体位置。
[0052]
作为一个优选的示例,上述处理器在确定出目标定位芯片在坐标系中的位置后,可对目标定位芯片在坐标系中的位置进行突出处理(如高亮处理),并通过显示器对目标定位芯片在坐标系中的位置进行突出显示(如高亮显示),从而使得操作人员能更加简单、明了的清楚内镜设备在目标对象体内的具体位置。
[0053]
步骤五,根据内镜设备在头端进入目标对象体内、且到达目标部位分叉口处时,对分叉口进行图像采集得到的真实图像,以及通过虚拟相机对三维重建模型中与分叉口对应的位置处进行图像采集得到虚拟图像,确定并通过显示器显示内镜设备在分叉口处的行进方向。
[0054]
上述目标部位为目标对象中需通过内镜进行检查的部位(如支气管),且该目标部位存在树枝状分叉结构,而待检查目标(如病灶)位于树枝状分叉的一细小分支。
[0055]
需要说明的是,处理器可通过上述ct数据,确定待检查目标在目标部位的位置,同时还能根据待检查目标在目标部位的位置,利用常用的路径规划方法在三维重建模型中规划内镜设备到达待检查目标的导航路径,并在三维重建模型中标注出该导航路径。
[0056]
在本技术的一些实施例中,在内镜设备的头端进入目标对象体内、且到达目标部位分叉口处时,处理器可控制内镜设备对该分叉口正中进行图像采集,并从内镜设备获得内镜设备通过图像采集得到的真实图像。与此同时,调用虚拟相机在三维重建模型中目标定位芯片当前所在位置处(即目标部位分叉口处),根据内镜设备进行图像采集的视野水平方向对目标部位分叉口处进行图像采集,得到虚拟图像。
[0057]
处理器在得到虚拟图像和真实图像后,可通过将虚拟图像与真实图像进行图像配准,得到配准图像;然后将导航路径在配准图像中的行进方向,作为内镜设备在分叉口处的行进方向,并通过显示器显示配准图像,实现导航。
[0058]
需要说明的是,由于三维重建模型中标注有导航路径,因此虚拟相机采集到的虚拟图像中携带有导航路径在分叉口处的行进方向。
[0059]
示例性的,如图9和图10所示,假设目标部位80为支气管,待检查目标81在支气管的一细小分支上,则内镜设备10进入目标对象体内、且到达支气管分叉口处时,内镜设备采集到的真实图像如图9中的c部分所示,与此同时,虚拟相机采集到的虚拟图像如图10中的d部分所示,从c部分和d部分可看出,三维重建模型中标注有导航路径82,虚拟图像中携带导航路径在分叉口处的行进方向。
[0060]
由于内镜设备与虚拟相机采集图像时的角度极有可能不同,甚至相差180度,从而造成内镜设备与虚拟相机采集的图像并不匹配,即造成导航路径不能准确进行导航。为避免这种情况的出现,在本技术的一些实施例中,处理器在调用虚拟相机采集虚拟图像时,控制虚拟相机按照内镜设备进行图像采集的视野水平方向采集虚拟图像,从而使虚拟相机所偏转的角度始终与现实中内镜设备所偏转的角度一致,进而确保虚拟相机采集到的照片旋转角度与现实是一致的,提高导航准确性。
[0061]
在本技术的一些实施例中,为确保处理器能准确获知内镜设备所偏转的角度,可在内镜设备的头端内设置陀螺仪,该陀螺仪与处理器连接。其中,该陀螺仪主要用于获知内镜设备与地球重力线之间偏转了多少角度,并将偏转的角度值传输给处理器,从而便于处理器控制虚拟相机的偏转角度。需要说明的是,在内镜设备前进运动的直线过程中(非分叉口的位置调整过程),可始终根据陀螺仪的数值,保持视野同一水平而不发生视野左右螺旋变化。
[0062]
在本技术的一些实施例中,如图11所示,内镜设备的头端内部中心的独立舱室可通过镜头前端的盖子打开,而陀螺仪101与目标定位芯片102可以以纵行的方式排列于镜头中心。
[0063]
需要说明的是,在本技术的一些实施例中,为了防止陀螺仪错误,将采集到的真实图像与虚拟图像进行图像配准比对,确保这两张图像已经完全左右旋转至同一角度,进而确保导航的准确性。需要进一步说明的是,这个配准在面对前方有3至4个甚至更多的分叉通道时将十分有用,此时图像对角度的敏感度需求将很高,稍微的旋转都可能导致进入错误的通道。
[0064]
在本技术的一些实施例中,为使操作人员能够更加直观的清楚内镜设备在目标对象体内的位置,还可在上述手术床上设置可以发射低功率可见激光的激光器,控制激光器的激光束垂直指向目标对象体内的目标定位芯片,使激光正好在目标对象身体表面形成一个光斑(该光斑的下方就是内镜的头端),从而使操作人员可以观察光斑在目标对象体表的位置知道目前内镜设备头端的位置。
[0065]
为设置上述激光器,如图1以及图12至图15所示,l形支架框203的顶端水平框上相互平行的第一侧边204和第二侧边205均为导轨,同时上述手术床20还包括:设置于第一侧边204上的第一运动滑轮206;设置于第二侧边205上的第二运动滑轮;可滑动导轨207,可滑动导轨207的一端与第一运动滑轮206的纵杆2061连接,另一端与第二运动滑轮的纵杆连接;设置于可滑动导轨207上的第三运动滑轮209,激光器208设置于第三运动滑轮209的纵杆上。需要说明的是,上述第一运动滑轮206、第二运动滑轮和第三运动滑轮209的结构相同,均包括驱动电机、横杆、纵杆、传动齿轮和滑轮。图中仅示意了第三运动滑轮209的结构,其中,纵杆与横杆交叉连接,传动齿轮2092的一侧与驱动电机2091连接,另一侧与横杆连接,滑轮设置于横杆的两端。
[0066]
其中,上述第一运动滑轮的驱动电机、第二运动滑轮的驱动电机以及第三运动滑轮的驱动电机均与处理器连接。相应的,上述处理器还用于:根据目标定位芯片在坐标系中的位置,对第一运动滑轮的驱动电机的运动量、第二运动滑轮的驱动电机的运动量以及第三运动滑轮的驱动电机的运动量进行控制,使激光器的激光束垂直指向目标对象体内的目标定位芯片。
[0067]
需要说明的是,上述第一运动滑轮的驱动电机、第二运动滑轮的驱动电机以及第三运动滑轮的驱动电机均可以为伺服电机,这三者的工作状态均由处理器控制,在第一运动滑轮和第二运动滑轮的驱动电机、传动齿轮的带动下,可滑动导轨可沿第一侧边的长度方向运动,在第三运动滑轮的带动下,激光器可沿可滑动导轨的长度方向运动。
[0068]
示例性的,上述手术床可以为标准手术床,长200mm、宽90mm,处理器可以为中央处理器(cpu,central processing unit)。
[0069]
值得一提的是,本技术实施例提供的上述内镜导航系统通过处理器为手术床构建坐标系,将预先构建的三维重建模型转换至该坐标系下,并在显示器中显示该三维重建模型以及内镜头端在该三维重建模型的位置,同时在内镜设备到达分叉口处时,通过处理器确定显示内镜设备在分叉口处的行进方向,并在显示器中显示内镜设备在分叉口处的行进方向,实现内镜设备在分叉口处的导航。
[0070]
即,该内镜导航系统可以至少提高现有内镜操作时的可视化程度、操作精度与路径导航,减少内镜操作下因路径选择困难,反复路径尝试操作带来的病变损伤,降低内镜操作难度。
[0071]
此外,需要说明的是,上述内镜导航系统适合于各种树枝状分叉结构的内镜导航,
如支气管镜、胆道镜、肾镜等。
[0072]
以上所述是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1