一种脉诊灵巧手、脉诊系统及其采集方法
1.本发明属于医疗器械技术领域,具体涉及一种脉诊灵巧手、脉诊系统及其采集方法。
背景技术:
2.中医常用的诊断方法包括望、闻、问、切,其中,脉诊是中医的重要诊断方法之一。中医手指切脉是在指端对桡动脉管施加不同压力的条件下,即浮、中、沉压力,依靠触觉、压觉、振动觉感受器探测脉象信息的。传统的中医医生脉诊的准确性取决于医生的状态,当医生状态不稳定时,脉诊的准确性也会下降。中医的脉诊很难量化,且每一个中医医生的脉诊手法、脉诊的感受、脉诊的判断都完全一样,有很强的个体性,脉诊不量化,难有统一分析的基础。
3.目前,绝大多数脉搏波采集系统主要依靠人工定位的方法寻找手腕关部位置,定位过程完全依靠单个人工没有反馈信息,易出现定位不准确的情况,且现有脉搏采集系统难以将定位、感知和数据采集形成稳定和准确的闭环,既不能保证采集数据的质量可靠性,又难以实现积累数据的标准化。
技术实现要素:
4.本发明的目的是克服现有技术中存在的定位位置、采集数据不准确的缺陷,提供了能够精准定位、质量可靠、可实现数据标准化的脉诊灵巧手、脉诊系统及其采集方法。
5.本发明解决其技术问题所采用的技术方案是:一种脉诊灵巧手,包括手架、开设在所述手架末端的竖直方向的安装孔以及安装在所述安装孔内的手指组件;所述手指组件包括安装在所述手架上的手指电机、一端与所述手指电机的输出轴连接另一端安装在所述安装孔内的7字形顶柱、内套在所述安装孔内的衬套以及与所述衬套连接的柔性衬底;所述衬套与所述安装孔之间设置有连接筒,所述衬套的内底面与所述7字形顶柱的下端面之间设置有施压弹簧,所述衬套的外轴肩与所述连接筒的内轴肩之间设置有反压弹簧;
6.所述柔性衬底与所述衬套连接处设置有至少一个静态压力传感模块,所述柔性衬底与人体腕部接触的面为弧形面,所述弧形面上设置有多个动态压力传感模块。
7.进一步地,所述静态压力传感模块为一个;所述动态压力传感模块为9个,采用上下两列排布,其中一列为五个,另一列为四个排列在所述柔性衬底的弧形面上。
8.进一步地,所述手指组件为三组,分别对应人体手腕的寸、关、尺位置。
9.一种脉诊系统,包括安装在脉诊平台上的机械臂、安装在所述机械臂上的四自由度移动装置、安装在所述四自由度移动装置输出端的灵巧手、主控模块以及上位机;所述灵巧手为上述权利要求1-3任一项所述的脉诊灵巧手;
10.所述机械臂末端安装有照明模块、用于采集人体手腕部照片的红外图像采集模块以及用于测量所述灵巧手与人体手腕部距离的激光测距模块;所述照明模块、红外图像采集模块以及激光测距模块与所述灵巧手对应设置;
11.所述主控模块与所述四自由度移动装置、灵巧手、照明模块以及激光测距模块通讯连接;所述主控模块、所述红外图像采集模块均与所述上位机通讯连接。
12.具体地,所述照明模块为多组led灯组的组合,所述每组led灯组均单独控制。
13.一种脉诊系统的复合脉搏波采集方法,其特征在于,包括以下步骤:
14.s1,采用激光测距模块测量机械臂末端到被测者手腕的垂直距离;
15.s2,获取被测者手腕的多张不同灯光角度下的图片信息;
16.s3,由深度学习模型根据s1中获取的图片信息计算出被测者的手腕的关部位置和手腕的三维结构;
17.s4,将s3中计算出的关部位置作为目标点,控制脉诊系统的四自由度移动装置进行移动,将四自由度移动装置输出端用于按压被测者手腕的灵巧手上的多个动态压力传感模块垂直于所述目标点位置;
18.s5,对被测者的手腕进行多维度脉搏波数据的预采集;
19.s6,将步骤s5中预采集的数据信号传输到上位机,上位机(9)对预采集到的脉搏波数据与脉搏波的典型特征库进行比对,确定关部位置的准确性;
20.s7,若步骤s6中预采集到的脉搏波数据中包含有脉搏波的典型特征,对关部对应的动态压力传感装置的中心位置和关部位置进行精准定位;主控模块根据上位机输出的反馈信号对关部位置对应的手指组件上的多个动态压力传感装置的位置做微动调节;
21.s8,确定关部位置对应的手指组件上的多个动态压力传感装置的位置与关部位置精准定位后,对被测者手腕的脉搏波进行最后多维度采集,并将采集到的数据传输到上位机。
22.进一步地,在所述步骤s6中,若采集到的数据中不包含有脉搏波的典型特征,则判定为关部定位不准确,重复所述步骤s1到s4的操作重新定位关部位置或进行人工辅助定位;若采集到的数据中包含有脉搏波的典型特征,则判定为关部定位准确,进行所述步骤s7的操作。
23.进一步地,步骤s7中,上位机采用时间序列的深度学习模型实时分析预采集到的多路脉搏波数据,并将实时脉搏波数据的峰值拟合成被测者的脉宽曲线,若所述脉宽曲线的最大峰值数据不在中心位置,所述上位机将分析的上述信号反馈传输到主控模块,所述主控模块输出控制信号控制所述四自由度移动装置对所述动态压力传感模块的中心位置微调至关部位置处。
24.进一步地,步骤s8中,上位机对采集到的数据进行分析参数提取并结合脉宽、脉位信息以及被测者的生理参数汇总导入到预测模型中,进行结果的预测。
25.进一步地,步骤s5中,所述主控模块设定所述灵巧手中每个所述手指组件的采集预压力数值,并计算出最佳压力;所述采集预压力数值为多个梯度压力值,所述最佳压力采集时间大于其他所述压力梯度值的采集时长;所述采集预压力数值分别为50/70/90/110/130/150/170/190/210/230gf十个压力梯度值。
26.本发明的一种脉诊灵巧手、脉诊系统及其采集方法的有益效果是:
27.1、本发明的脉诊灵巧手设置三组手指组件,分别对应的人体手腕的寸、关、尺位置,且每一组手指组件上均设置有至少一个静态压力传感模块和多个动态压力传感模块,使得脉诊灵巧手对人体手腕能够多点采集,将多点采集的数据拟合受试者的脉宽曲线从而
保证采集数据的准确性。同时与人体手腕接触的面为弧形面,符合手腕的自然状态,进一步的保证采集数据的准确性。
28.2、本发明的脉诊系统包括机械臂、灵巧手、红外图像采集模块、主控模块以及上位机等,主控模块与四自由度移动装置、灵巧手、照明模块以及激光测距模块通讯连接,主控模块、红外图像采集模块均与上位机通讯连接,实现脉搏波定位、采集和反馈的闭环系统,能够为实现积累数据的标准化提供数据参考,有利于脉诊的量化且能保证量化的准确性和可靠性。
29.3、本发明脉诊系统的复合脉搏波的采集方法通过获取被测者手腕的多张不同灯光角度下的图片信息,确定关部位置,且对手腕进行预采集,将预采集数据与脉搏波的典型特征库进行对比,可多次确定关部位置的准确性,避免了现有技术中需要依靠单个医护人员确定关部位置的不准确、不可靠性。
30.4、本发明脉诊系统的复合脉搏波的采集方法中的上位机对预采集的特征参数提取并分析预测,采用时间序列的深度学习模型实时分析采集到的多路脉搏波数据,并将实时脉搏波数据的峰值拟合成被测者的脉宽曲线。且对最大峰值不在中心位置的脉宽曲线进行信号反馈给主控模块,主控模块对对灵巧手的位置进行微调,保证关部位置与对应的动态压力传感装置能够精准定位,整个采集方法形成一个信号采集、计算分析、反馈、调整再采集输出的闭合系统,有效的保证了采集数据的质量可靠性。
附图说明
31.下面结合附图和具体实施方式对本发明作进一步详细的说明。
32.图1是本发明实施例的脉诊灵巧手的立体图;
33.图2是本发明实施例的脉诊灵巧手的上视图;
34.图3是本发明实施例的脉诊灵巧手的剖视图;
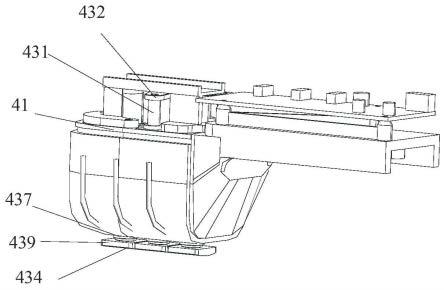
35.图4是本发明实施例的脉诊灵巧手的静态压力传感模块与动态压力模块的安装图;
36.图5是本发明实施例的柔性衬底上的动态压力模块的排布图;
37.图6是本发明实施例的脉诊系统的结构示意图;
38.图7是本发明实施例的脉诊系统的主视图;
39.图8是本发明实施例的脉诊系统的控制图;
40.图9是本发明实施例的复合脉搏波采集方法的流程图;
41.图10是本发明实施例的红外图像采集模块采集的部分图像;
42.图11是本发明实施例的采集方法的具体操作流程图。
43.图中:1、脉诊平台,2、机械臂,3、四自由度移动装置,4、灵巧手,41、手架,43、手指组件,431、手指电机,432、7字形顶柱,433、衬套,434、柔性衬底,435、施压弹簧,436、反压弹簧,437、静态压力传感模块,438、动态压力传感模块,439、金属连接件,4310、弧形面,4311、连接筒,4312、固定件,4313、电路板,5、照明模块,6、红外图像采集模块,7、激光测距模块,8、主控模块,9、上位机,10、网络接口。
具体实施方式
44.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
45.如图1-图5所示的本发明的一种脉诊灵巧手4具体实施例,包括手架41、开设在手架41末端的竖直方向的安装孔以及安装在安装孔内的手指组件43;手指组件43包括安装在手架41上的手指电机431、一端与手指电机431的输出轴连接另一端安装在安装孔内的7字形顶柱432、内套在安装孔内的衬套433以及与衬套433连接的柔性衬底434;衬套433的内底面与7字形顶柱432的下端面之间设置有施压弹簧435,衬套433的外轴肩与安装孔的内轴肩之间设置有反压弹簧436;柔性衬底434与衬套433连接处设置有至少一个静态压力传感模块437,柔性衬底434与人体腕部接触的面为弧形面4310,弧形面4310上设置有多个动态压力传感模块438。
46.手指电机431的输出轴通过螺丝与7字形顶柱432相连接,衬套433与安装孔之间设置有连接筒4311,柔性衬底434与衬套433之间通过金属连接件439连接,其中静态压力传感装置安装在金属连接件439的外侧,当手指电机431轴的回收来对7字形顶柱432施加向下的压力,将静态压力传感装置从连接筒4311中向下顶出;与7字形顶柱432直接接触的施压弹簧435和设置在衬套433外轴肩处的反压弹簧436组成手指组件43的动态弹簧,当7字形顶柱432传递压力时,可以构成动态力平衡系统,减少按压器件的损坏,便于闭环力控。在三个7字形顶柱432的上方设置有固定件4312,在手架上安装有电路板4313用于手指机构43与主控模块8的通讯连接。
47.需要说明的是,本发明的灵巧手4采用动静压结合传感模块,静态压力传感模块437采用静态压力传感器为压阻式传感器,通过金属连接件439末端的螺丝连接,具有0.02gf的感应精度;动态压力传感装置为动压力传感器,本实施例中静态压力传感模块437为一个;动态压力传感模块438为9个,采用上下两列排布,其中一列为五个,另一列为四个排列在柔性衬底434的弧形面4310上。动态压力传感模块438为9个,5+4的柔性阵列式安装在柔性衬底434的弧形面4310上,其中动态压力传感器为电容式传感器,单个传感器通道宽度为0.6mm,每个传感器通道之间的间隔为0.2mm;柔性衬底434厚度约3mm,通过贴合的方式附于金属连接件439上,柔性阵列式排布的9个动态压力传感器贴于柔性衬底434上,通过贴附于被测者腕部可以采集到单部的脉搏波信息。
48.需要说明的是手指组件43为三组,分别对应人体手腕的寸、关、尺位置。本发明的脉诊灵巧手4设置三组手指组件43,分别对应的人体手腕的寸、关、尺位置,且每一组手指组件43上均设置有至少一个静态压力传感模块437和多个动态压力传感模块438,使得脉诊灵巧手4对人体手腕能够多点采集,将多点采集的数据拟合受试者的脉宽曲线从而保证采集数据的准确性。同时与人体手腕接触的面为弧形面4310,符合手腕的自然状态,进一步的保证采集数据的准确性。
49.一种脉诊系统的具体实施例如图6-8所示,包括安装在脉诊平台1上的机械臂2、安装在机械臂2上的四自由度移动装置3、安装在四自由度移动装置3输出端的灵巧手4、主控模块8以及上位机9;灵巧手4为上述中的脉诊灵巧手4;机械臂2末端安装有照明模块5、用于采集人体手腕部照片的红外图像采集模块6以及用于测量灵巧手4与人体手腕部距离的激光测距模块7;照明模块5、红外图像采集模块6以及激光测距模块7与灵巧手4对应设置;主
控模块8与四自由度移动装置3、灵巧手4、照明模块5以及激光测距模块7通讯连接;主控模块8、红外图像采集模块6均与上位机9通讯连接。本实施例中的四自由度移动装置3包括x轴移动、y轴移动、z轴移动以及沿x轴轴线旋转的四个自由度,其中沿x轴轴线旋转的自由度可以根据对被测者的左手或右手的脉搏波采集对灵巧手4做180
°
的角度旋转,实现左手和右手脉搏波的采集。本发明的采集系统能够实现对被测者左手和右手的脉搏波采集,具有一定的通用性,需要说明的是四自由度移动装置3的四个自由度的移动,本领域技术人员容易想到的移动方式均可实现,在此不再对四自由度移动装置3的具体结构做详细描述。
50.当脉诊仪开始工作前,需被测者坐定,将手腕放置于脉诊系统的采集区域,确保寸、关、尺三部位于两组激光测距仪的光点之间,随后启动脉诊系统,脉诊系统将通过图像识别和三维重构获取患者的关部位置;随后主控模块8驱动控制四自由度移动装置3的x、y、z三轴的三个自由度的运动,将动态压力传感模块438运送至被测者腕部上方约2-5mm处,随后根据被测者关部皮肤的倾斜度通过四自由度移动装置3的旋转自由度调整脉诊灵巧手4的指尖倾斜度,使动态压力传感模块438部分能够与被测者关部垂直接触;再控制手指电机431回收手指电机431的输出轴将三指末端的静态压力传感模块437顶出,与被测者皮肤接触,静态压力传感模块437采集实时的按压力,用于闭环力控制,而动态压力传感模块438采集脉搏波,并将数据传输回上位机9,本实施例中的x、y、z方向以图7位基准。
51.本实施例中照明模块5为多组led灯组的组合,每组led灯组均单独控制,多组led灯组是由40个近红外灯珠组成,用于获取近红外光源照射下手腕血管形态;主控模块8是有项目组定制开发,其集成了照明模块5、激光测距模块7、静动态压力传感模块438、四自由度移动装置34个部分的数据传输控制,用于与上位机9系统实现交互;近红外图像采集模块6是海康的近红外相机,拍摄手腕图片用于定位脉搏位置;需要说明的是本脉诊系统还包括网络接口10是将近红外图像采集模块6和上位机9系统连接,接口方式是网口,能够快速传输大容量图片数据。
52.采用上述脉诊系统的复合脉搏波采集方法,包括以下步骤:
53.s1,采用激光测距模块7测量机械臂2末端到被测者手腕的垂直距离;
54.s2,获取被测者手腕的多张不同灯光角度下的图片信息;
55.s3,由深度学习模型根据s1中获取的图片信息计算出被测者的手腕的关部位置和手腕的三维结构;
56.s4,将s3中计算出的关部位置作为目标点,控制脉诊系统的四自由度移动装置3进行移动,将四自由度移动装置3输出端用于按压被测者手腕的灵巧手4上的多个动态压力传感模块438垂直于所述目标点位置;
57.s5,对被测者的手腕进行多维度脉搏波数据的预采集;
58.s6,将步骤s5中预采集的数据信号传输到上位机9,上位机9对预采集到的脉搏波数据与脉搏波的典型特征库进行比对,确定关部位置的准确性;在所述步骤s6中,若采集到的数据中不包含有脉搏波的典型特征,则判定为关部定位不准确,重复所述步骤s1到s4的操作重新定位关部位置或进行人工辅助定位;若采集到的数据中包含有脉搏波的典型特征,则判定为村口定位准确,进行所述步骤s6的操作。
59.s7,若步骤s6中预采集到的脉搏波数据中包含有脉搏波的典型特征,对关部对应的动态压力传感装置438的中心位置和关部位置进行精准定位;主控模块8根据上位机9输
出的反馈信号对关部位置对应的手指组件43上的多个动态压力传感装置438的位置做微动调节;
60.s8,确定关部位置对应的手指组件43上的多个动态压力传感装置438的位置与关部位置精准定位后,对被测者手腕的脉搏波进行最后多维度采集,并将采集到的数据传输到上位机9。
61.具体参照图9,步骤s7中,上位机9采用时间序列的深度学习模型实时分析预采集到的多路脉搏波数据,并将实时脉搏波数据的峰值拟合成被测者的脉宽曲线,若所述脉宽曲线的最大峰值数据不在中心位置,所述上位机9将分析的上述信号反馈传输到主控模块8,所述主控模块8输出控制信号控制所述四自由度移动装置3对所述动态压力传感模块438的中心位置微调至关部位置处。需要说明的是在实际应用中,很难达到没有偏差或误差,因此这里尽可能的移动到关部位置处,使得拟合的脉宽曲线的最大幅值在曲线的中心位置附近。
62.步骤s8中,上位机9对采集到的数据进行分析、参数提取并结合脉宽、脉位信息以及被测者的生理参数汇总导入到预测模型中,进行结果的预测。本实施例中的预测模型由专家数据结合神经网络训练所得,本发明中不做具体说明,旨在为脉诊量化和实现积累数据的标准化做铺垫。使得脉诊系统不仅提供人工智能算法来提取脉象特征、分析脉象要素并预测受试者的脉象,可进行结果的预测,还能提供远程医疗的接口,在必要时可使远程专家实时看到受试者的问诊数据、脉搏波数据、脉象分析预测结果等,并给出更有针对性的专家建议,从而实现脉搏波定位、采集和诊断的全闭环。
63.步骤s5中,所述主控模块8设定所述灵巧手4中每个所述手指组件43的采集预压力数值,并计算出最佳压力;所述采集预压力数值为多个梯度压力值,所述最佳压力采集时间大于其他所述压力梯度值的采集时长;所述采集预压力数值分别为50/70/90/110/130/150/170/190/210/230gf十个压力梯度值。本发明脉诊系统的复合脉搏波的采集方法通过获取被测者手腕的多张不同灯光角度下的图片信息,采集的部分照片如图10所示,确定关部位置,切对手腕进行预采集,将预采集数据与脉搏波的典型特征库进行对比,可多次确定关部位置的准确性,且可对灵巧手的位置进行微调,避免了现有技术中需要依靠单个医护人员确定关部位置的不准确、不可靠性。本实施例中,最佳梯度压力采集时长为30秒,其他梯度压力值采集时间均为5秒。需要进一步说明的是,步骤s8中对于被测者手腕的脉搏波正式采集时的预压力与步骤5中预采集时的预压力相同或有些微不同。
64.具体来说,如图11所示,上述脉诊系统的复合脉搏波采集方法,首先由激光测距装置测量近红外相机相对于被测者手腕的距离,40个灯珠循环亮,由近红外相机拍摄40张不同灯光角度下的手腕图片,并由深度学习模型计算出手腕的关部位置和三维结构,四自由度移动装置3以此为目标点移动到关部位置并保证手指组件43末端的阵列排布的传感装置垂直于手腕关部位置,在完成定位后,首先进行脉搏波的预采集,若发现采集到的数据中不包含有脉搏波的典型特征,则判定为关部定位不准确,需要人工辅助定位或重新定位关部位置;
65.为了准确模仿中医师的“浮中沉”的基本脉搏采集指法并将其标准化,本发明基于高精度的绝对压力传感器来检测施加在关部处的压力大小,并以此为反馈信号用于设置脉搏波采集预压力的大小,目前在多梯度采集脉搏波时,分别设置了50/70/90/110/130/150/
170/190/210/230gf等10个压力梯度,该触觉感知的控制精度可到
±
5gf;当开始采集数据后,9个动态压力传感器循环9次,不同梯度采集5s,基于时间序列的深度学习模型开始实时分析采集到的9路脉搏波数据,并将实时脉搏波数据的峰值拟合成被测者的脉宽曲线。若脉宽曲线的峰值数据不在中心位置,则可能由于采集的关部位置有偏差,则系统可以通过控制机械臂2左右/前后微调的方式将多个动态压力传感模块的中心位置精准的移动到关部位置处,使得拟合的脉宽曲线的最大幅值在曲线的中心位置附近。数据采集完成后,计算寸、关、尺三部分的最佳脉搏波并提取参数值、信息,然后根据需要向上位机9和云端服务器结果展示,存储脉象数据及其他数据,整个采集过程结束。
66.应当理解,以上所描述的具体实施例仅用于解释本发明,并不用于限定本发明。由本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1