一种口腔种植窝洞预备数字化控制方法及定点杆、定向杆
1.本发明涉及数字化辅助口腔种植窝洞预备;具体涉及一种口腔种植窝洞预备数字化控制方法及定点杆、定向杆。
背景技术:
2.口腔种植学的理论基础是骨结合,也称骨整合,种植体与牙槽骨直接结合以提供固位力。种植体植入位置不佳往往导致发生种植体周围炎,引起骨吸收。因此,决定种植成败的关键因素之一是种植窝洞预备的精准性,让植入种植体获得理想的三维位置。
3.目前临床上种植窝洞的预备主要有以下三种方式:医生自由手凭经验预备、个性化种植导板辅助预备和实时手术导航系统辅助预备。其中医生自由手预备为目前临床上最主要的手术方式。自由手窝洞预备过程中,在本级窝洞预备后插入相应直径带刻度的测量杆,目测评估测量杆的深度,角度以及与邻牙、对“合”牙的位置关系,以此来调整下一级备洞的深度及方向。由于目测的方法误差较大,不能定量的指导临床进行精确的调整。种植体植入位置主要取决于医生的临床经验和操作的准确性,任何操作的微小失误和偏差都会影响到远期的功能和美观效果,甚至会损伤下牙槽神经、上颌窦底及鼻底黏膜等重要解剖结构,造成不必要的并发症,因此,对医生的技术水平要求很高。相对于自由手方式,个性化种植导板可明显提高种植窝洞预备的精度。基于口扫和cbct数据,将设计的种植位置、方向和深度等信息转移到口内,实现较为精准的种植定位。然而,该方法操作复杂,需术前设计、制作和消毒个性化种植导板,种植导板影响备洞过程中生理盐水的冷却效果,张口受限患者无法进行种植导板辅助的窝洞预备,此外导板制作增加了患者的经济负担,难以广泛应用。而实时导航系统通过cbct数据可测量牙槽骨宽度和高度,将测量信息实时转移到口内,借助复杂的手术导航系统,实现对种植手术精准控制。手术过程中术者需要监控屏幕上显示的钻头或种植体的实时位置,而不能对术区发生的变化(例如用于配准的参考板术中移位)进行实时监控,存在一定的手术安全风险。安装在种植手机上的定位器较重影响手术操作【1】,且临床操作流程也较为复杂,因此动态导航技术往往用于需要避开某些关键解剖结构的特定病例,没有成为日常常规的临床操作【2】。
4.参考文献:
5.【1】口腔种植机器人在口腔种植手术中的初步应用;
6.【2】一种通用型口腔种植定位器的体外实验研究。
技术实现要素:
7.(一)要解决的技术问题
8.本发明的目的是提供一种口腔种植窝洞预备数字化控制方法及定点杆、定向杆,在传统自由手窝洞预备的基础上,结合口内扫描和定点杆、定向杆的辅助测量装置,通过数字化手段辅助种植窝洞预备,减小种植窝洞预备的误差。
9.(二)技术方案
10.本发明的一种口腔种植窝洞预备数字化控制方法,有以下步骤:
11.1)数字化辅助种植窝洞预备前根据患者口内三维扫描数据和cbct数据,用mimics软件术前设计以修复为导向的位置定义为理想种植体位置,所述种植体定义为理想种植体,高度为h,理想种植体长轴与牙槽嵴顶交点pv,输出具有相对位置关系的口内三维扫数据a1和理想种植体数据b1;
12.2)建立坐标系:以理想种植体颈部平面的中心点为原点o,近中方向为m轴方向,颊侧方向为b轴方向,合面方向为c轴方向,同时将理想种植体平台分成四个象限,分别为近中颊,远中颊,远中舌和近中舌,pv坐标为(0,0,p);
13.3)种植窝洞初定位:以数字化辅助种植窝洞预备初期,先用球钻定点,用2.2mm钻初定位,窝洞深度大概在h/2处,插入定点杆,就位后进行口内三维扫描,得到带有定点杆的口内三维扫描数据c1;
14.4)保持a1和b1不动,依据牙列配准,将c1配准到a1,再将设计好的定点杆数据配准到c1定点杆上,c1定点杆长轴与牙槽嵴顶交点pr坐标为(m,b,c);
15.5)定点偏移量计算:偏移距离如果m》0,b》0,则向远中舌侧方向调整prpv,如果m》0,b《0,则向远中颊侧方向调整prpv,如果m《0,b》0,则向近中舌侧方向调整prpv,如果m《0,b《0,则向近中颊侧方向调整prpv,与近中轴夹角arctan(b/m)+kπ;k=0或1;
16.6)根据偏移距离及角度,调整定点位置,直至满足临床要求;
17.7)数字化辅助种植窝洞预备中使用2.2mm麻花钻备洞,深度为h,插入设计好的定向杆,就位后进行口内三维扫描,得到带有定向杆的测量杆的三维扫描数据c2;
18.8)备洞偏移量计算:保持a和b不动,依据牙列配准,将c2配准到a1;基于特征配准,再将设计好的2.2mm直径的测量杆数据配准到c2定向杆上;c2定向杆中心轴线与定向杆底部平面和顶部平面交点分别为pa(m1,b1,c1)、pb(m2,b2,c2);对应的实际种植体颈部平面的中心点为o’(m0,b0,c0),计算可得o’坐标:m0=m1+h*(m2-m1)/papb,b0=b1+h*(b2-b1)/papb,c0=c1+h*(c2-c1)/papb;
19.定向杆的测量杆与近中轴夹角θ=arctan[(b2-b1)/(m2-m1)]+kπ;k=0或1;
[0020]
定向杆的测量杆与咬合面方向夹角
[0021]
定向杆的测量杆的倾斜方向:
[0022]
如果m1《m2,b1《b2,则向近中颊侧方向倾斜,
[0023]
如果m1《m2,b1=b2,则向近中倾斜,
[0024]
如果m1《m2,b1》b2,向近中舌倾斜,
[0025]
如果m1=m2,b1《b2,则向颊侧倾斜,
[0026]
如果m1=m2,b1=b2,则无倾斜,
[0027]
如果m1=m2,b1》b2,向舌侧倾斜,
[0028]
如果m1》m2,b1《b2,向远中颊倾斜,
[0029]
如果m1》m2,b1=b2,向远中倾斜,
[0030]
如果m1》m2,b2《b1,向远中舌倾斜;
[0031]
9)根据前面得到的偏移量,调整下一级备洞的深度及角度,重复上述计算过程,直
至数字化辅助种植窝洞预备至最后一级。
[0032]
其中,所述定点杆数据配准到c1定点杆上的方法:基于特征配准,配准方法:根据口扫定点杆上端平面拟合出平面,依据定点杆圆柱曲面拟合出中心轴线,基于平面与轴线两特征对齐,将正向设计的定点杆数据配准到口内三维扫描数据中。
[0033]
其中,所述c2定向杆中心轴线与定向杆底部平面为根方平面,c2定向杆中心轴线与定向杆顶部平面为冠方平面。
[0034]
其中,所述定点杆总长度为14mm,上端圆柱为三维扫描区,直径为4.8mm,高度为2.6mm,下部圆柱直径为2.2mm,长度为7.8mm,圆柱底部是直径为2.2mm,高度1mm的球台,分别在定点杆高度4mm、6mm、8mm处设计凹槽,便于临床备洞深度参考;上下两个圆柱之间由高度为2.6mm的圆台连接。
[0035]
其中,所述定向杆总长度为22mm;上端圆柱为三维扫描区,直径为4.8mm,高度为4mm;根据逐级备洞尺寸,设计理想种植体直径4.8mm,依次使用2.2mm、2.8mm、3.5mm、4.2mm麻花钻备洞,则2.2mm为第一级备洞;2.8mm为第二级备洞;3.5mm为第三极备洞;4.2mm为第四级备洞,下部圆柱为测量杆,下部圆柱直径分别设置为2.2mm、2.8mm、3.5mm、4.2mm,下部圆柱长度为15.3mm,圆柱底部是分别为直径2.2mm、2.8mm、3.5mm、4.2mm,高度1mm的球台,分别在定向杆高度4mm、6mm、8mm、10-12mm、14mm处设计凹槽,便于临床备洞深度参考;上下两个圆柱之间由高度为1.7mm的圆台连接。
[0036]
(三)有益效果
[0037]
本发明的优点在于:
[0038]
本发明通过口内扫描数据自动配准算法结合定点杆、定向杆装置提高了自由手窝洞预备精度,克服了传统自由手窝洞预备的经验依赖,以数字化手段代替了实物定位导板,相对于实时导航技术更加简便,作为一种适宜技术更适合日常临床工作中普及。
附图说明
[0039]
图1是本发明的坐标系的示意图;
[0040]
图2是定点偏移距离的三维坐标系的示意图;
[0041]
图3是本发明c2定向杆中心轴线与定向杆底部平面(即根方)和顶部平面(即冠方)交点的示意图;
[0042]
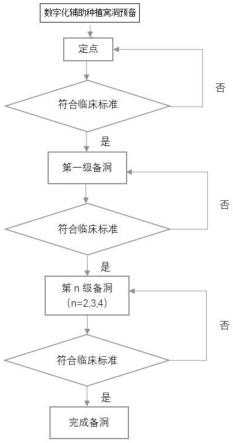
图4是本发明工作流程的方框示意图;
[0043]
图中,o:理想种植体颈部平面的中心点原点;m:近中方向轴线方向;b:颊侧方向轴线方向;c:合面方向轴线方向;pv:理想种植体长轴与牙槽嵴顶交点;pr:c1定点杆长轴与牙槽嵴顶交点;p:是沿合面方向轴线方向的坐标值;m:沿m轴线方向的坐标值;b:沿b轴线方向的坐标值;c:沿c轴线方向的坐标值;pa:c2定向杆中心轴线与定向杆底部平面交点;pb:c2定向杆中心轴线与定向杆顶部平面交点;m0:实际种植体颈部平台的中心点o’坐标中沿m轴线方向的坐标值;b0:实际种植体颈部平台的中心点o’坐标中沿b轴线方向的坐标值;c0:实际种植体颈部平台的中心点o’坐标中沿c轴线方向的坐标值;m1:c2定向杆中心轴线与定向杆底部平面交点pa坐标中沿m轴线方向的坐标值;b1:c2定向杆中心轴线与定向杆底部平面交点pa坐标中沿b轴线方向的坐标值;c1:c2定向杆中心轴线与定向杆底部平面交点pa坐标中沿c轴线方向的坐标值;m2:c2定向杆中心轴线与定向杆顶部平面交点pb坐标中沿m轴线
方向的坐标值;b2:c2定向杆中心轴线与定向杆顶部平面交点pb坐标中沿b轴线方向的坐标值;c2:c2定向杆中心轴线与定向杆顶部平面交点pb坐标中沿c轴线方向的坐标值。
具体实施方式
[0044]
以下实施例用于说明本发明,但不用来限制本发明的范围。
[0045]
本发明的一种口腔种植窝洞预备数字化控制方法,有以下步骤:
[0046]
1)数字化辅助种植窝洞预备前根据患者口内三维扫描数据和cbct数据,用mimics软件术前设计以修复为导向的位置定义为理想种植体位置,所述种植体定义为理想种植体,高度为h,理想种植体长轴与牙槽嵴顶交点pv,输出具有相对位置关系的口内三维扫数据a1和理想种植体数据b1;
[0047]
2)建立坐标系:以理想种植体颈部平面的中心点为原点o,近中方向为m轴方向,颊侧方向为b轴方向,合面方向为c轴方向,同时将理想种植体平台分成四个象限,分别为近中颊,远中颊,远中舌和近中舌,pv坐标为(0,0,p);
[0048]
3)种植窝洞初定位:以数字化辅助种植窝洞预备初期,先用球钻定点,用2.2mm钻初定位,窝洞深度大概在h/2处,插入定点杆,就位后进行口内三维扫描,得到带有定点杆的口内三维扫描数据c1;
[0049]
4)保持a1和b1不动,依据牙列配准,将c1配准到a1,再将设计好的定点杆数据配准到c1定点杆上,c1定点杆长轴与牙槽嵴顶交点pr坐标为(m,b,c);
[0050]
5)定点偏移量计算:偏移距离如果m》0,b》0,则向远中舌侧方向调整prpv,如果m》0,b《0,则向远中颊侧方向调整prpv,如果m《0,b》0,则向近中舌侧方向调整prpv,如果m《0,b《0,则向近中颊侧方向调整prpv,与近中轴夹角arctan(b/m)+kπ;k=0或1;
[0051]
6)根据偏移距离及角度,调整定点位置,直至满足临床要求;
[0052]
7)数字化辅助种植窝洞预备中使用2.2mm麻花钻备洞,深度为h,插入设计好的定向杆,就位后进行口内三维扫描,得到带有定向杆的测量杆的三维扫描数据c2;
[0053]
8)备洞偏移量计算:保持a和b不动,依据牙列配准,将c2配准到a1;基于特征配准,再将设计好的2.2mm直径的测量杆数据配准到c2定向杆上;c2定向杆中心轴线与定向杆底部平面和顶部平面交点分别为pa(m1,b1,c1)、pb(m2,b2,c2);对应的实际种植体颈部平面的中心点为o’(m0,b0,c0),计算可得o’坐标:m0=m1+h*(m2-m1)/papb,b0=b1+h*(b2-b1)/papb,c0=c1+h*(c2-c1)/papb;
[0054]
定向杆的测量杆与近中轴夹角θ=arctan[(b2-b1)/(m2-m1)]+kπ;k=0或1;
[0055]
定向杆的测量杆与咬合面方向夹角
[0056]
定向杆的测量杆的倾斜方向:
[0057]
如果m1《m2,b1《b2,则向近中颊侧方向倾斜,
[0058]
如果m1《m2,b1=b2,则向近中倾斜,
[0059]
如果m1《m2,b1》b2,向近中舌倾斜,
[0060]
如果m1=m2,b1《b2,则向颊侧倾斜,
[0061]
如果m1=m2,b1=b2,则无倾斜,
[0062]
如果m1=m2,b1》b2,向舌侧倾斜,
[0063]
如果m1》m2,b1《b2,向远中颊倾斜,
[0064]
如果m1》m2,b1=b2,向远中倾斜,
[0065]
如果m1》m2,b2《b1,向远中舌倾斜;
[0066]
9)根据前面得到的偏移量,调整下一级备洞的深度及角度,重复上述计算过程,直至数字化辅助种植窝洞预备至最后一级。
[0067]
其中,所述定点杆数据配准到c1定点杆上的方法:基于特征配准,配准方法:根据口扫定点杆上端平面拟合出平面,依据定点杆圆柱曲面拟合出中心轴线,基于平面与轴线两特征对齐,将正向设计的定点杆数据配准到口内三维扫描数据中。
[0068]
其中,所述c2定向杆中心轴线与定向杆底部平面为根方平面,c2定向杆中心轴线与定向杆顶部平面为冠方平面。
[0069]
其中,所述定点杆总长度为14mm,上端圆柱为三维扫描区,直径为4.8mm,高度为2.6mm,下部圆柱直径为2.2mm,长度为7.8mm,圆柱底部是直径为2.2mm,高度1mm的球台,分别在定点杆高度4mm、6mm、8mm处设计凹槽,便于临床备洞深度参考;上下两个圆柱之间由高度为2.6mm的圆台连接。
[0070]
其中,所述定向杆总长度为22mm;上端圆柱为三维扫描区,直径为4.8mm,高度为4mm;根据逐级备洞尺寸,设计理想种植体直径4.8mm,依次使用2.2mm、2.8mm、3.5mm、4.2mm麻花钻备洞,则2.2mm为第一级备洞;2.8mm为第二级备洞;3.5mm为第三极备洞;4.2mm为第四级备洞,下部圆柱为测量杆,下部圆柱直径分别设置为2.2mm、2.8mm、3.5mm、4.2mm,下部圆柱长度为15.3mm,圆柱底部是分别为直径2.2mm、2.8mm、3.5mm、4.2mm,高度1mm的球台,分别在定向杆高度4mm、6mm、8mm、10-12mm、14mm处设计凹槽,便于临床备洞深度参考;上下两个圆柱之间由高度为1.7mm的圆台连接。
[0071]
如上所述,便可较为充分的实现本发明。以上所述仅为本发明的较为合理的实施实例,本发明的保护范围包括但并不局限于此,本领域的技术人员任何基于本发明技术方案上非实质性变性变更均包括在本发明包括范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1