一种双下肢不等长摄片垫脚器
1.本发明涉及摄片垫脚器技术领域,具体涉及一种双下肢不等长摄片垫脚器。
背景技术:
2.双下肢不等长的患者在治疗下肢之前,需要拍摄双下肢在竖直站立状态的骨骼医学影片,为了使患者在站立时骨盆的两端保持水平,达到拍摄出标准下肢全长正位影片的效果,一般会在患者相对较短的腿脚下方放置木块或纸张书本等来垫高腿脚,不同的患者双下肢不等长的尺寸是存在差异的,导致需要在相对较短的腿脚下方频繁放置不同厚度的木块或纸张书本等,这需要反复调整垫高物体的厚度,即使垫高前透视骨盆倾斜的程度,能够在x片上测量出需垫高的厚度,而实际上这也仅仅是相对的,往往并不准确,这无疑大大增加了医务人员的负担,同时也增加了患者射线暴露次数,并且大部分垫脚器上供患者站立的位置不能够移动,而o型腿两只脚分开的距离较小,x型腿两只脚分开的距离就较大,供患者站立的位置不能够移动,这需要工作人员不断辅助移动患者的足部,尤其对于儿童,即使在家长的帮助下,摆到合适的体位拍片,也不是一件容易的事,这均不利于o型腿或者x型腿患者平稳的站立在垫脚器上进行摄片,进而影响双下肢不等长垫脚摄片的效率。
技术实现要素:
3.为了克服上述的技术问题,本发明的目的在于提供一种双下肢不等长摄片垫脚器,通过在定位板一端的两侧均布置有矩形框架,矩形框架的内部滑动连接有移动板,当双肢不等长患者的短肢站立在定位板上,长肢站立在对应位置移动板上并通过移动板上的挡板一将移动板向背离定位板的方向移动,实现短肢站立在定位板上,长肢倾斜站立在移动板上,从而实现双下肢标准站立体位站立,为便于双下肢不等长患者临时站立在该垫脚器上,通过双轴电机带着轴杆转动,轴杆通过蜗杆带着涡轮转动使连接轴二转动,连接轴二上的传动齿轮一与连接轴一上的传动齿轮一啮合转动,由于传动齿轮一上偏离圆心的位置与连接轴一和连接轴二插接固定,且初始状态下连接轴一与连接轴二之间间距最大,随着两个传动齿轮一啮合转动使连接轴一与连接轴二之间的间距逐渐变小,即连接轴一通过两个滑动柱一带着矩形框架与移动板下移降低高度,便于位于移动板上长肢向定位板方向移动靠近,矩形框架不断带着移动板下降高度,最终实现双下肢靠拢分别以双下肢标准站立体位站立(即骨盆水平、髌骨朝前站立姿势站立,该情况下的患者为单纯的双下肢不等长),此时患者的骨盆两端保持水平方便摄片,在连接轴二转动的同时,链接轴二的端部通过传动件带着连接轴四转动,连接轴四与连接轴三上的传动齿轮二同步啮合传动,同理传动齿轮二上偏离圆心的位置与连接轴三和连接轴四插接固定,只是初始状态下连接轴三与连接轴四之间间距最小,随着两个传动齿轮二啮合使连接轴三与连接轴四之间的间距逐渐变大,即连接轴三通过两个滑动柱二带着垫高板上移升高高度,垫高板上移与移动板下移同时进行,且垫高板上移的距离与移动板下移的距离相同,此时患者长肢从移动板移出走到定位板上,短肢相应的从定位板上走到对应位置垫高板上,实现患者双肢标准站立在垫脚器上
进行摄片,整个双肢不等长垫高过程省去人工预测腿长和人工放置垫高件,省时省力,便于快速垫高短肢,有利于提高双下肢不等长垫脚摄片的效率。
4.本发明的目的可以通过以下技术方案实现:一种双下肢不等长摄片垫脚器,包括底板,所述底板顶面的两侧分别固定有两个匚形支撑板一和两个匚形支撑板二,所述匚形支撑板一的内部设置有高度调节件一,所述高度调节件一包括连接轴一和连接轴二,所述连接轴一和连接轴二的中部均固定有相互啮合的传动齿轮一,所述连接轴一的两端均转动连接有与匚形支撑板一滑动连接的滑动柱一,两个所述滑动柱一的顶部固定有矩形框架,所述矩形框架的内部滑动连接有移动板,所述匚形支撑板二的内部设置有高度调节件二,所述高度调节件二包括连接轴三和连接轴四,所述连接轴三与连接轴四的中部均固定有相互啮合的传动齿轮二,所述匚形支撑板二的一侧设置有用于驱动连接轴四与对应位置连接轴二同步转动的传动件,所述连接轴四的两端均转动连接有与匚形支撑板二滑动连接的滑动柱二,两个所述滑动柱的顶部固定有垫高板,两个所述匚形支撑板二之间固定有用于驱动两个高度调节件一运作的双轴电机,所述匚形支撑板一与匚形支撑板二的外侧设置有与底板固定连接的防护罩,所述防护罩的中部固定有定位板,通过长肢带着移动板在矩形框架上移动,便于不等长的双肢能够站立在移动板与定位板上,通过双轴电机带着轴杆转动使连接轴二转动,连接轴一与连接轴二上的传动齿轮一啮合转动使移动板下移,便于长肢向短肢方向靠拢笔直站立,连接轴二通过传动件带着连接轴四转动,连接轴三与连接轴四上的传动齿轮二啮合转动使垫高板同步上移,便于将移动板下降的高度转移到垫高板升高的高度上,患者短肢放到垫高板上,长肢放到定位板上,便于快速垫高短肢,有利于提高双下肢不等长垫脚摄片的效率。
5.进一步在于:所述连接轴一中部的两端均固定有滚轮一,所述连接轴二中部的两端均固定有分别与对应位置滚轮一滚动贴靠的滚轮二,所述连接轴三中部的两端均固定有滚轮三,所述连接轴四中部的两端均固定有分别与对应位置滚轮三滚动贴靠的滚轮四,滚轮一与滚轮二滚动贴靠使两个传动齿轮一稳定的转动实现调节移动板的高度,滚轮三与滚轮四滚动贴靠使两个传动齿轮二稳定的转动实现调节垫高板的高度。
6.进一步在于:所述滚轮一、滚轮二、滚轮三及滚轮四的直径相同,所述滚轮一与滚轮二二者靠近轮缘的位置分别与对应位置连接轴一和连接轴二插接固定,所述滚轮三与滚轮四二者靠近轮缘的位置分别与对应位置连接轴三和连接轴四插接固定,从而使滚轮一与滚轮二二者均与传动齿轮一同步转动,滚轮三与滚轮四二者均与传动齿轮二同步转动。
7.进一步在于:所述传动齿轮一与传动齿轮二的直径相同,所述连接轴一与连接轴二二者分别与对应位置传动齿轮一偏离圆心的位置插接固定,所述连接轴三与连接轴四分别与对应位置传动齿轮二偏离圆心的位置插接固定,所述连接轴二与连接轴四二者分别与对应位置匚形支撑板一和匚形支撑板二转动连接,从而使两个传动齿轮一相互啮合转动时,连接轴一逐渐向靠近连接轴二的方向移动,两个传动齿轮二相互啮合转动时,连接轴三逐渐向背离连接轴四的方向移动,实现连接轴一下移多少距离连接轴三同步上移多少距离。
8.进一步在于:所述连接轴二贯穿匚形支撑板一的一端固定有锥齿轮一,所述连接轴四贯穿匚形支撑板二的一端固定有锥齿轮二,所述传动件包括与匚形支撑板二固定连接的连接块,所述连接块的中部转动连接有转动轴,所述转动轴的顶端与低端均固定连接有
锥齿轮三,所述锥齿轮一与锥齿轮二分别与对应位置锥齿轮三啮合传动,从而使锥齿轮一带着锥齿轮三转动,锥齿轮三带着锥齿轮二转动,实现连接轴二与连接轴四同步转动。
9.进一步在于:所述连接轴二贯穿匚形支撑板一的一端固定有涡轮,所述双轴电机的两个输出端均传动连接有轴杆,所述轴杆背离双轴电机的一端固定有蜗杆,所述蜗杆与对应位置涡轮啮合传动,所述匚形支撑板一靠近轴杆的一侧固定有与对应位置轴杆转动连接的连接座,从而使轴杆上的蜗杆转动带着连接轴二上涡轮转动实现连接轴二转动,连接座使轴杆稳定的转动。
10.进一步在于:所述矩形框架的一端开设有矩形通孔,所述矩形通孔内部固定有限位块,所述移动板顶面的一侧固定有挡板一,所述移动板顶面的另一侧滑动连接有挡板二,所述挡板二底面与限位块顶面传动贴靠,所述挡板二底面与限位块的顶面均为斜面,从而使移动板在向背离定位板的方向移动时,挡板二从移动板里面移出,当移动板向靠近定位板的方向移动时,挡板二移动收纳到移动板里面。
11.进一步在于:所述定位板的两侧分别与对应位置矩形框架和垫高板贴靠,所述底板的顶面固定有与双轴电机底面固定的支撑柱,便于患者长肢可以踩在就近位置的移动板上,支撑柱便于支撑固定双轴电机。
12.进一步在于:所述垫高板顶面的一侧固定有连接杆,所述防护罩顶面固定有两个分别与对应位置连接杆的标杆,所述标杆的外侧设置有刻度,在垫高板上移过程中,连接杆同步上移并指示着标杆上的刻度,便于记录双肢的长度差值。
13.本发明的有益效果:1、通过在定位板一端的两侧均布置有矩形框架,矩形框架的内部滑动连接有移动板,当双下肢不等长患者的短肢站立在定位板上,长肢站立在对应位置移动板上并通过移动板上的挡板一将移动板向背离定位板的方向移动,实现短肢站立在定位板上,长肢倾斜站立在移动板上,实现双下肢标准站立体位站立,便于双下肢不等长患者临时站立在该垫脚器上,通过双轴电机带着轴杆转动,轴杆通过蜗杆带着涡轮转动使连接轴二转动,连接轴二上的传动齿轮一与连接轴一上的传动齿轮一啮合转动,由于传动齿轮一上偏离圆心的位置与连接轴一和连接轴二插接固定,且初始状态下连接轴一与连接轴二之间间距最大,随着两个传动齿轮一啮合转动使连接轴一与连接轴二之间的间距逐渐变小,即连接轴一通过两个滑动柱一带着矩形框架与移动板下移降低高度,便于位于移动板上长肢向定位板方向移动靠近,矩形框架不断带着移动板下降高度,最终实现双肢靠拢分别以双下肢标准站立体位站立,(即髌骨朝前站立姿势站立,该情况下的患者为单纯的双下肢不等长),此时患者的骨盆两端保持水平方便摄片,在连接轴二转动的同时,链接轴二的端部通过传动件带着连接轴四转动,连接轴四与连接轴三上的传动齿轮二同步啮合传动,同理传动齿轮二上偏离圆心的位置与连接轴三和连接轴四插接固定,只是初始状态下连接轴三与连接轴四之间间距最小,随着两个传动齿轮二啮合使连接轴三与连接轴四之间的间距逐渐变大,即连接轴三通过两个滑动柱二带着垫高板上移升高高度,垫高板上移与移动板下移同时进行,且垫高板上移的距离与移动板下移的距离相同,此时患者长肢从移动板移出走到定位板上,短肢相应的从定位板上走到对应位置垫高板上,实现患者双肢标准站立在垫脚器上进行摄片,整个双肢不等长垫高过程省去人工预测腿长和人工放置垫高件,省时省力,便于快速垫高短肢,有利于提高双下肢不等长垫脚摄片的效率;
2、通过在矩形框的内部固定有限位块,在移动板的一侧滑动连接有挡板二,挡板二的底端斜面与限位块的顶端斜面接触,在长肢带着移动板向背离定位板的方向移动时,在限位块的斜面作用下使挡板二随着移动移动板移动逐渐向上移动,实现挡板二移动到脚的一侧与脚抵触,在脚带着移动板定位板方向移动过程中,挡板二便于给长肢上的脚提供施力作用点,方便脚带着移动板回到定位板一侧,实现双肢靠近竖直站立;3、通过设置两个移动板,在短肢站立到定位板上后,长肢可以就近站立在对应位置的移动板上,便于短时间内长肢快速站立到垫脚器上,通过设置两个垫高板,当长肢从移动板上转移到定位板上后,短肢可以就近站立在对应位置的垫高板上,便于短时间内短肢快速站立到垫高板上进行摄片,通过在垫高板上固定有连接杆,连接杆背离垫高板的一端对着标杆,随着垫高板上移,连接杆同步上移并指示标杆上不同的刻度数值,便于从标杆上直观的读取骨盆两端水平时双肢长度差值,通过滚轮一与滚轮二的配合设置,滚轮三与滚轮四的配合设置,从而使两个传动齿轮一稳定的相互啮合转动,两个传动齿轮二稳定的相互啮合转动,起到辅佐两个传动齿轮一及两个传动齿轮二精确传动的作用。
14.4、当患者为o型腿,此时两只脚之间的距离较小时,患者一只脚站立在定位板上,另一只脚就近站立在对应位置移动板上,此时移动板不移动便于满足两只脚间距较小的情况,同理通过移动板降低高度,调节双下肢的位置使骨盆保持水平,然后进行摄片,当患者为x型腿,此时两只脚之间的距离较大时,患者一只脚站立在定位板上,另一只脚就近站立在对应位置移动板上,此时移动板移动便于满足两只脚间距较大的情况,通过调节移动板的高度再次使骨盆保持水平进行摄片,从而便于满足不同类型患者使用,扩大了垫脚器的使用范围。
附图说明
15.下面结合附图对本发明作进一步的说明。
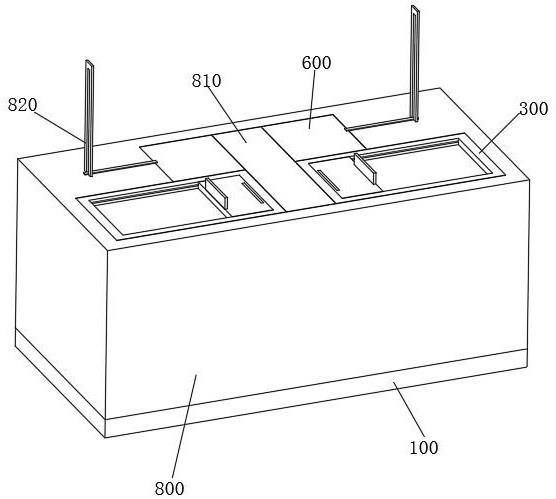
16.图1是本发明整体结构示意图;图2是本发明中防护罩结构示意图;图3-4是本发明中移动板降低与垫高板升高状态结构示意图;图5-6是本发明中底板顶部不同视角整体结构示意图;图7是本发明中匚形支撑板一与高度调节件一结构示意图;图8是本发明中匚形支撑板二与高度调节件二结构示意图;图9是本发明中矩形框架与移动板拆分立体结构示意图;图10是本发明中移动板在矩形框架上移动状态结构示意图。
17.图中:100、底板;110、匚形支撑板一;111、连接座;120、匚形支撑板二;200、高度调节件一;210、连接轴一;211、滑动柱一;220、连接轴二;221、锥齿轮一;222、涡轮;230、传动齿轮一;240、滚轮一;250、滚轮二;300、矩形框架;310、限位块;400、移动板;410、挡板一;420、挡板二;500、高度调节件二;510、连接轴三;511、滑动柱二;520、连接轴四;521、锥齿轮二;530、传动齿轮二;540、传动件;541、连接块;542、锥齿轮三;550、滚轮三;560、滚轮四;600、垫高板;610、连接杆;700、双轴电机;710、轴杆;711、蜗杆;800、防护罩;810、定位板;820、标杆。
具体实施方式
18.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
19.请参阅图1-10所示,一种双下肢不等长摄片垫脚器,包括底板100,底板100顶面的两侧分别固定有两个匚形支撑板一110和两个匚形支撑板二120,匚形支撑板一110的内部设置有高度调节件一200,高度调节件一200包括连接轴一210和连接轴二220,连接轴一210和连接轴二220的中部均固定有相互啮合的传动齿轮一230,连接轴一210的两端均转动连接有与匚形支撑板一110滑动连接的滑动柱一211,两个滑动柱一211的顶部固定有矩形框架300,矩形框架300的内部滑动连接有移动板400,匚形支撑板二120的内部设置有高度调节件二500,高度调节件二500包括连接轴三510和连接轴四520,连接轴三510与连接轴四520的中部均固定有相互啮合的传动齿轮二530,匚形支撑板二120的一侧设置有用于驱动连接轴四520与对应位置连接轴二220同步转动的传动件540,连接轴四520的两端均转动连接有与匚形支撑板二120滑动连接的滑动柱二511,两个滑动柱二511的顶部固定有垫高板600,两个匚形支撑板二120之间固定有用于驱动两个高度调节件一200运作的双轴电机700,匚形支撑板一110与匚形支撑板二120的外侧设置有与底板100固定连接的防护罩800,防护罩800的中部固定有定位板810,通过长肢带着移动板400在矩形框架300上移动,便于不等长的双肢能够站立在移动板400与定位板810上,通过双轴电机700带着轴杆710转动使连接轴二220转动,连接轴一210与连接轴二220上的传动齿轮一230啮合转动使移动板400下移,便于长肢向短肢方向靠拢使双下肢标准位站立,连接轴二220通过传动件540带着连接轴四520转动,连接轴三510与连接轴四520上的传动齿轮二530啮合转动使垫高板600同步上移,便于将移动板400下降的高度转移到垫高板600升高的高度上,患者短肢放到垫高板600上,长肢放到定位板810上,便于快速垫高短肢,有利于提高双下肢不等长垫脚摄片的效率。
20.连接轴一210中部的两端均固定有滚轮一240,连接轴二220中部的两端均固定有分别与对应位置滚轮一240滚动贴靠的滚轮二250,连接轴三510中部的两端均固定有滚轮三550,连接轴四520中部的两端均固定有分别与对应位置滚轮三550滚动贴靠的滚轮四560,滚轮一240与滚轮二250滚动贴靠使两个传动齿轮一230稳定的转动实现调节移动板400的高度,滚轮三550与滚轮四560滚动贴靠使两个传动齿轮二530稳定的转动实现调节垫高板600的高度;滚轮一240、滚轮二250、滚轮三550及滚轮四560的直径相同,滚轮一240与滚轮二250二者靠近轮缘的位置分别与对应位置连接轴一210和连接轴二220插接固定,滚轮三550与滚轮四560二者靠近轮缘的位置分别与对应位置连接轴三510和连接轴四520插接固定,从而使滚轮一240与滚轮二250二者均与传动齿轮一230同步转动,滚轮三550与滚轮四560二者均与传动齿轮二530同步转动。
21.传动齿轮一230与传动齿轮二530的直径相同,连接轴一210与连接轴二220二者分别与对应位置传动齿轮一230偏离圆心的位置插接固定,连接轴三510与连接轴四520分别与对应位置传动齿轮二530偏离圆心的位置插接固定,连接轴二220与连接轴四520二者分别与对应位置匚形支撑板一110和匚形支撑板二120转动连接,从而使两个传动齿轮一230
相互啮合转动时,连接轴一210逐渐向靠近连接轴二220的方向移动,两个传动齿轮二530相互啮合转动时,连接轴三510逐渐向背离连接轴四520的方向移动,实现连接轴一210下移多少距离连接轴三510同步上移多少距离;连接轴二220贯穿匚形支撑板一110的一端固定有锥齿轮一221,连接轴四520贯穿匚形支撑板二120的一端固定有锥齿轮二521,传动件540包括与匚形支撑板二120固定连接的连接块541,连接块541的中部转动连接有转动轴,转动轴的顶端与低端均固定连接有锥齿轮三542,锥齿轮一221与锥齿轮二521分别与对应位置锥齿轮三542啮合传动,从而使锥齿轮一221带着锥齿轮三542转动,锥齿轮三542带着锥齿轮二521转动,实现连接轴二220与连接轴四520同步转动。
22.连接轴二220贯穿匚形支撑板一110的一端固定有涡轮222,双轴电机700的两个输出端均传动连接有轴杆710,轴杆710背离双轴电机700的一端固定有蜗杆711,蜗杆711与对应位置涡轮222啮合传动,匚形支撑板一110靠近轴杆710的一侧固定有与对应位置轴杆710转动连接的连接座111,从而使轴杆710上的蜗杆711转动带着连接轴二220上涡轮222转动实现连接轴二220转动,连接座111使轴杆710稳定的转动;矩形框架300的一端开设有矩形通孔,矩形通孔内部固定有限位块310,移动板400顶面的一侧固定有挡板一410,移动板400顶面的另一侧滑动连接有挡板二420,挡板二420底面与限位块310顶面传动贴靠,挡板二420底面与限位块310的顶面均为斜面,从而使移动板400在向背离定位板810的方向移动时,挡板二420从移动板400里面移出,当移动板400向靠近定位板810的方向移动时,挡板二420移动收纳到移动板400里面。
23.定位板810的两侧分别与对应位置矩形框架300和垫高板600贴靠,底板100的顶面固定有与双轴电机700底面固定的支撑柱,便于患者长肢可以踩在就近位置的移动板400上,支撑柱便于支撑固定双轴电机700;垫高板600顶面的一侧固定有连接杆610,防护罩800顶面固定有两个分别与对应位置连接杆610的标杆820,标杆820的外侧设置有刻度,在垫高板600上移过程中,连接杆610同步上移并指示着标杆820上的刻度,便于记录双肢的长度差值。
24.工作原理:使用时,在地面开设一个孔槽,将该垫脚器安装到孔槽里面,使定位板810、垫高板600及移动板400所在平面与地面齐平,患者将短肢移动到定位板810上靠近移动板400的一端,接着将长肢就近移动到对应位置移动板400上方,为了能够稳定的站立在垫脚器上,患者可以用长肢上的脚推动挡板一410,使长肢与移动板400向矩形框架300上背离定位板810的方向移动,使双肢分开,短肢竖直站立,长肢略微倾斜站立,在长肢带着移动板400移动过程中,移动板400上的挡板二420在限位块310顶面斜面的作用下逐渐上移,最终挡板二420移动到脚的一侧(挡板二420移出状态参照说明书附图中的图10所示),接着开启双轴电机700带着其输出端的轴杆710转动,轴杆710带着蜗杆711转动,蜗杆711带着连接轴二220上的涡轮222转动使连接轴二220转动,连接轴二220上的传动齿轮一230与连接轴一210上的传动齿轮一230啮合转动,由于传动齿轮一230上偏离圆心的位置与连接轴一210和连接轴二220插接固定,且初始状态下连接轴一210与连接轴二220之间间距最大,随着两个传动齿轮一230啮合转动使连接轴一210与连接轴二220之间的间距逐渐变小,连接轴一210带着两个滑动柱一211沿着匚形支撑板一110下移,从而使滑动柱一211带着矩形框架300与移动板400下移降低高度,同时,长肢通过挡板二420带着移动板400回到初始位置,挡板二420与定位板810接触,长肢逐渐靠拢短肢,实现双肢标准体位站立,此时挡板二420在
自身重力作用下下落到初始位置,即挡板二420收纳到移动板400里面,便于接下来长肢在移动板400上移动;在轴杆710带着连接轴二220转动的过程中,连接轴二220上的锥齿轮一221带着传动件540下方的锥齿轮三542转动,传动件540上方的锥齿轮三542带着连接轴四520上的锥齿轮二521转动,从而使连接轴四520与连接轴二220同步转动,连接轴四520与连接轴三510上的传动齿轮二530同步啮合传动,同理传动齿轮二530上偏离圆心的位置与连接轴三510和连接轴四520插接固定,只是初始状态下连接轴三510与连接轴四520之间间距最小,随着两个传动齿轮二530啮合使连接轴三510与连接轴四520之间的间距逐渐变大,连接轴三510通过两个滑动柱二511带着垫高板600上移升高高度,垫高板600上移与移动板400下移同时进行,且垫高板600上移的距离与移动板400下移的距离相同,此时患者长肢从移动板400移出走到定位板810上靠近垫高板600的一端,短肢相应的从定位板810上走到对应位置垫高板600上,实现患者双肢以标准体位站立在垫脚器上进行摄片,此时患者的骨盆保持水平,且随着垫高板600上移,垫高板600上的连接杆610同步上移并指示标杆820上不同的刻度数值,便于从标杆820上直观的读取双肢长度差值,方便垫高的同时进行数据记录,在上述患者进行垫脚摄片的过程中,医务人员或者家属可以扶持患者辅助患者的双肢移动位置。
25.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
26.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1