一种可视多功能伤口深度测量装置的制作方法
1.本发明涉及伤口深度测量技术领域,尤其涉及一种可视多功能伤口深度测量装置。
背景技术:
2.对伤口深度测量在治疗时尤为重要,而现有技术中在测量伤口深度时并没有专用的工具,通常是采用棉棒、镊子、止血钳等较长的工具插入伤口中,然后再通过尺子对测量工具插入伤口中的部分进行测量;
3.首先,在对伤口深度测量时无法观察到伤口内的情况,不利于治疗工作的进行,其次,在测量伤口深度时不仅没有专用的工具,且还需要借助尺子等工具相互配合才能得出伤口深度数值,使用非常不方便。
技术实现要素:
4.本发明提供一种可视多功能伤口深度测量装置,以解决上述技术问题。
5.为解决上述技术问题,本发明提供的一种可视多功能伤口深度测量装置,包括光导纤维管,所述光导纤维管前侧加工有刻度线,所述光导纤维管外端套设有定位机构,所述光导纤维管内部设有空心杆,所述空心杆底端固定设有微型摄像头,所述微型摄像头顶端电性连接有电线,所述光导纤维管一侧设有显示器,所述微型摄像头和显示器通过电线电性连接;
6.所述定位机构包括内螺纹罩,所述内螺纹罩套设在光导纤维管外端,所述内螺纹罩底部设有底板,所述光导纤维管贯穿底板,所述底板顶端固定设有外螺纹筒,所述外螺纹筒设在内螺纹罩内部,且所述外螺纹筒外端与内螺纹罩内侧壁通过螺纹连接,所述内螺纹罩顶端贯穿设有转杆,所述转杆和内螺纹罩顶端通过轴承活动连接,所述转杆底端固定设有摩擦轮,所述摩擦轮设在外螺纹筒内侧,且所述摩擦轮外端与外螺纹筒内壁相接触,所述转杆顶端固定设有第一转轮,所述第一转轮设在光导纤维管一侧。
7.优选的,所述内螺纹罩顶端开设有第一通孔,所述光导纤维管贯穿第一通孔,所述第一通孔内侧壁上固定设有第一橡胶圈,所述第一橡胶圈套设在光导纤维管外端,且所述光导纤维管外端与第一橡胶圈内侧相接触。
8.优选的,所述底板底端开设有第二通孔,所述光导纤维管贯穿第二通孔。
9.优选的,所述底板底端加工有多个箭头,所述第二通孔设在多个箭头之间,且多个所述箭头以底板中轴线呈环形阵列分布。
10.优选的,所述第一转轮外端加工有第一防滑纹。
11.优选的,所述光导纤维管外端固定设有限位环,所述限位环设在内螺纹罩顶部。
12.优选的,所述电线贯穿空心杆,所述空心杆顶端和底端分别开设有一个线孔,所述电线贯穿线孔。
13.优选的,所述空心杆外端套设有两个第二橡胶圈,所述第二橡胶圈设在光导纤维
管内部,且所述第二橡胶圈外端与光导纤维管内侧壁相接触。
14.优选的,所述空心杆外端固定套设有第二转轮,所述第二转轮设在光导纤维管顶部,所述第二转轮外端加工有第二防滑纹。
15.优选的,所述底板底部设有外壳,所述光导纤维管设在外壳顶部并延伸至外壳内部,所述外壳内部底端固定设有底座,所述底座设在光导纤维管底部,且所述底座顶端与光导纤维管底端相适配。
16.与相关技术相比较,本发明提供的一种可视多功能伤口深度测量装置具有如下有益效果:
17.1、通过将光导纤维管插入伤口中,期间微型摄像头可透过光导纤维管壁拍摄伤口内的情况,并通过电线将拍摄的画面通过显示器显示出来供医护人员观看,做到对伤口可视化深度测量,有利于治疗工作的顺利进行;
18.2、通过光导纤维管插入伤口内部后,再下移定位机构至伤口处的皮肤处,然后再控制底板进一步靠近伤口处,当底板贴在伤口处的皮肤上时,再通过底板上的箭头指向光导纤维管上的刻度线的位置即可判断出光导纤维管插入伤口中的长度,进而较为精准的得出伤口深度的数值,且全程不需要再借助尺子等工具配合测量,直接读数,使用非常方便。
附图说明
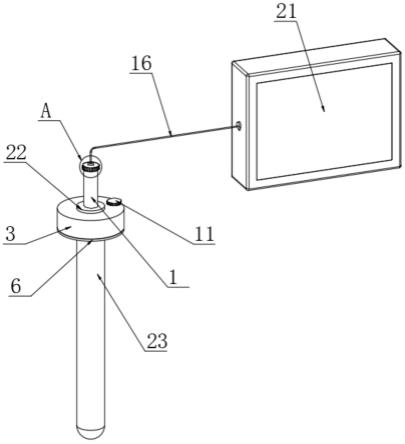
19.图1为本发明提出的一种可视多功能伤口深度测量装置的整体立体结构示意图;
20.图2为本发明提出的一种可视多功能伤口深度测量装置的图1中a部放大立体结构示意图;
21.图3为本发明提出的一种可视多功能伤口深度测量装置的局部立体结构示意图;
22.图4为本发明提出的一种可视多功能伤口深度测量装置的光导纤维管立体结构示意图;
23.图5为本发明提出的一种可视多功能伤口深度测量装置的光导纤维管内部立体结构示意图;
24.图6为本发明提出的一种可视多功能伤口深度测量装置的摩擦轮和微型摄像头立体结构示意图;
25.图7为本发明提出的一种可视多功能伤口深度测量装置的外壳剖视立体结构示意图;
26.图8为本发明提出的一种可视多功能伤口深度测量装置的定位机构立体结构示意图;
27.图9为本发明提出的一种可视多功能伤口深度测量装置的转杆和摩擦轮立体结构示意图;
28.图10为本发明提出的一种可视多功能伤口深度测量装置的内螺纹罩立体结构示意图;
29.图11为本发明提出的一种可视多功能伤口深度测量装置的底板和外螺纹筒第一视角立体结构示意图;
30.图12为本发明提出的一种可视多功能伤口深度测量装置的底板和外螺纹筒第二视角立体结构示意图。
31.图中标号:1、光导纤维管,2、刻度线,3、内螺纹罩,4、第一通孔,5、第一橡胶圈,6、底板,7、第二通孔,8、外螺纹筒,9、转杆,10、摩擦轮,11、第一转轮,12、第一防滑纹,13、箭头,14、空心杆,15、微型摄像头,16、电线,17、线孔,18、第二橡胶圈,19、第二转轮,20、第二防滑纹,21、显示器,22、限位环,23、外壳,24、底座。
具体实施方式
32.实施例一,由图1-12给出,本发明包括光导纤维管1,所述光导纤维管1前侧加工有刻度线2,所述光导纤维管1外端套设有定位机构,所述光导纤维管1内部设有空心杆14,所述空心杆14底端固定设有微型摄像头15,所述微型摄像头15顶端电性连接有电线16,所述光导纤维管1一侧设有显示器21,所述微型摄像头15和显示器21通过电线16电性连接,光导纤维管1插入伤口内部后,在通过刻度线2进行读数,可快速得出伤口深度的测量数值,而微型摄像头15可对伤口内部进行拍摄并通过显示器21将画面显示出来,显示器21在使用时可显示出虚拟坐标,类似雷达坐标,以便于医护人员辅助观察光导纤维管1在伤口中潜行的深度和方向,参照坐标一般都是以患者头部为12点,顺时针计算几点钟方位,且该种辅助坐标为现有技术中医疗设备常见功能,因此在此不再对其过度详细介绍。
33.所述电线16贯穿空心杆14,所述空心杆14顶端和底端分别开设有一个线孔17,所述电线16贯穿线孔17,线孔17方便电线16穿过空心杆14。
34.所述空心杆14外端套设有两个第二橡胶圈18,所述第二橡胶圈18设在光导纤维管1内部,且所述第二橡胶圈18外端与光导纤维管1内侧壁相接触,第二橡胶圈18可将空心杆14在光导纤维管1内部固定住,同时还不会影响空心杆14在光导纤维管1内部转动或者抽出。
35.所述空心杆14外端固定套设有第二转轮19,所述第二转轮19设在光导纤维管1顶部,所述第二转轮19外端加工有第二防滑纹20,第二转轮19方便手动对空心管14进行转动,从而对微型摄像头15进行角度调节以便于拍摄伤口内不同位置的画面,第二防滑纹20起到防滑作用。
36.所述底板6底部设有外壳23,所述光导纤维管1设在外壳23顶部并延伸至外壳23内部,所述外壳23内部底端固定设有底座24,所述底座24设在光导纤维管1底部,且所述底座24顶端与光导纤维管1底端相适配,外壳23对光导纤维管1起到保护作用,在不使用时可将外壳23套在光导纤维管1上,底座24可对光导纤维管1起到支撑并固定的作用。
37.实施例二,在实施例一的基础上,所述定位机构包括内螺纹罩3,所述内螺纹罩3套设在光导纤维管1外端,所述内螺纹罩3底部设有底板6,所述光导纤维管1贯穿底板6,所述底板6顶端固定设有外螺纹筒8,所述外螺纹筒8设在内螺纹罩3内部,且所述外螺纹筒8外端与内螺纹罩3内侧壁通过螺纹连接,所述内螺纹罩3顶端贯穿设有转杆9,所述转杆9和内螺纹罩3顶端通过轴承活动连接,所述转杆9底端固定设有摩擦轮10,所述摩擦轮10设在外螺纹筒8内侧,且所述摩擦轮10外端与外螺纹筒8内壁相接触,所述转杆9顶端固定设有第一转轮11,所述第一转轮11设在光导纤维管1一侧,在光导纤维管1插入伤口中后,可按住内螺纹罩3使得定位机构整体沿着光导纤维管1向伤口处的皮肤移动,当定位机构大致靠近伤口后,可通过第一转轮11、转杆9和摩擦轮带动外螺纹筒8转动使得外螺纹筒8和底板6下移,更为细致精准的调节底板6靠近伤口处的皮肤,以便于可更精准的读出刻度线2的数值,进而
提高对伤口深度测量的精准性,在摩擦轮10与外螺纹筒8内壁横向接触传动时,外螺纹筒8也会竖向轻微移动,并不会影响摩擦轮10对外螺纹筒8的传动转动。
38.所述内螺纹罩3顶端开设有第一通孔4,所述光导纤维管1贯穿第一通孔4,所述第一通孔4内侧壁上固定设有第一橡胶圈5,所述第一橡胶圈5套设在光导纤维管1外端,且所述光导纤维管1外端与第一橡胶圈5内侧相接触,第一通孔4方便内螺纹罩3沿着光导纤维管1移动,而第一橡胶圈5与光导纤维管1接触的部位摩擦力更大,进而可避免定位机构在光导纤维管1上随意移动。
39.所述底板6底端开设有第二通孔7,所述光导纤维管1贯穿第二通孔7,第二通孔7可使得底板6沿着光导纤维管1移动时二者不会发生相互干涉的问题。
40.所述底板6底端加工有多个箭头13,所述第二通孔7设在多个箭头13之间,且多个所述箭头13以底板6中轴线呈环形阵列分布,箭头13指向刻度线2的位置方便对测量数据进行读数,而环形阵列分布可在底板6转动任意角度时均会有箭头13指向刻度线2进行辅助读数。
41.所述第一转轮11外端加工有第一防滑纹12,第一防滑纹12起到防滑作用。
42.所述光导纤维管1外端固定设有限位环22,所述限位环22设在内螺纹罩3顶部,限位环22可对定位机构起到限位作用,避免定位机构在光导纤维管1上上移过度而发生脱离的问题。
43.工作原理:
44.光导纤维管1在不使用时可放置在外壳23内部,既可对光导纤维管1起到保护作用,还可避免光导纤维管1被污染,使用时将外壳23取下,然后开启微型摄像头15和显示器21,随后将光导纤维管1底部沿着伤口以垂直与皮肤表面的角度插入伤口内部,在光导纤维管1底部插入伤口内部时,微型摄像头15可透过光导纤维管1对伤口内部的情况进行拍摄,随后再通过电线16传递至显示器21并通过显示器21将微型摄像头15拍摄的画面显示出来,进而起到可视化的伤口深度测量;
45.当感觉到光导纤维管1底部受阻无法在插入时则说明到底了,此时光导纤维管1插入伤口中的长度即为伤口深度,然后用手向下推动内螺纹罩3,此时内螺纹罩3通过第一橡胶圈5过盈配合套在光导纤维管1上,当定位机构整体被推动至靠近伤口处皮肤的位置时,为了能够得到更精准的伤口深度数值,可停止下推定位机构并转动第一转轮11,第一转轮11转动时可通过转杆9带动摩擦轮10转动,由于摩擦轮10外端与外螺纹筒8内壁过盈配合接触,而外螺纹筒8外壁又与内螺纹罩3内壁通过螺纹连接,因此在摩擦轮10转动时可通过摩擦力使得外螺纹筒8转动,而在外螺纹筒8转动时则会因为与内螺纹罩3的螺纹连接而沿着螺纹下移,即,外螺纹筒8带动底板6沿着光导纤维管1向伤口处的皮肤移动,直至底板6底部贴住伤口处的皮肤即可停止调节;
46.此时再将光导纤维管1从伤口处取出,底板6底部的箭头13指向光导纤维管1上的刻度线2即为光导纤维管1插入伤口的深度,从而得出伤口深度的数值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1