一种动态监测调节牵拉力量的食管拉钩
1.本发明属于医疗器械技术领域,具体涉及一种动态监测调节牵拉力量的食管拉钩。
背景技术:
2.食管即食道,上接咽部,下与胃的贲门相连的一条细长管道,是饮食入胃的通道。食管主要由环节肌层(内层)和纵行肌层(外层)组成。由于这两种肌肉的收缩蠕动,迫使食物进入胃,故其主要作用是向胃内推进食物。食管发生钝性损伤、锐器伤及火器伤时,由于含有各种细菌的食物及反流胃内消化液溢入纵隔内,可引起严重纵隔感染,威胁患者生命健康。
3.现目前,临床中多类手术设计到将食管牵开,如食道手术、气管插管手术等,在整个牵拉食管的过程中其力度很难把控,容易对食管造成损伤,以至不可挽救的后果,威胁患者的生命安全;同时,在使用的食管拉钩多是钝器,与食管硬性接触,在是牵拉的过程中极易损伤食管,造成食管的破裂损伤。
4.因此,在临床手术中需要一种能帮助操作者掌控牵拉力、同时于物理层面保护食管的食管牵拉装置。
技术实现要素:
5.为了解决上述技术问题,本发明设计了一种动态监测调节牵拉力量的食管拉钩,通过外力调控介入牵拉力调节,同时设计拉钩于食管柔性连接,以解决上述的牵拉力量控制困难、拉钩对食管容易造成损伤的问题。
6.为了达到解决上述技术问题的技术效果,本发明是通过以下技术方案来实现的:一种动态监测调节牵拉力量的食管拉钩,其特征在于,包括:牵拉头、过渡连杆、拿持柄、弹性过渡带;
7.所述过渡连杆一端带阻尼的滑动连接于拿持柄内腔,另一端可拆卸的卡接牵拉头,所述弹性过渡带固定连接在过渡连杆与拿持柄之间;
8.所述牵拉头可拆卸的连接有带有薄膜压力传感器的柔性垫,所述拿持柄内设有驱动构件驱动过渡连伸缩滑动,且受其内部中央处理单元接收薄膜压力传感器监测信息相应调控;
9.进一步的,所述牵拉头整体呈圆弧状,且设有卡槽,所述柔性垫固定连接“u”卡件,通过“u”卡件卡接于牵拉头的卡槽内,所述牵拉头的尾端固定设有“t”型卡块;所述“u”卡件外侧和卡槽内侧契合的位置处设有卡接时接触的电导片,电连接薄膜压力传感器和拿持柄;
10.进一步的,所述柔性垫内部的薄膜压力传感器的里侧契合其接受压力的位置设有硬质的压力传递过渡片,所述该过渡片未突出至柔性垫外侧;
11.进一步的,所述过渡连杆包括连接端头和滑动连接在拿持柄内腔的连接条,所述
连接端头设有契合牵拉头“t”型卡块的“t”型槽,所述连接条上下两侧设有齿条,且末端分别设有导电滑块和电阻滑块;所述齿条契合拿持柄的驱动构件,导电滑块和电阻滑块分别接触拿持柄内部的滑槽的上下两侧;
12.进一步的,所述“t”型卡块的“t”型槽贴合部位分别设有电连接的电导片;
13.进一步的,所述拿持柄的驱动构件设置于其内部滑槽的上下两侧,主体为带有齿轮的步进电机,所述该步进电机的齿轮与连接条的齿条啮合,驱动过渡连杆运动,所述拿持滑槽上下两侧面固定设有分别接触导电滑块和电阻滑块的导电条和电阻条;
14.进一步的,所述导电滑块和电阻滑块的背部和滑槽外端侧壁之间设有复位弹簧;所述导电条通过导线电连接中央处理单元,所述导电滑块通过导线电连接“t”型槽;
15.进一步的,所述拿持柄外部固定设有显示屏、启停按键以及调节按键,所述拿持柄内部还设有蓄电池;
16.本发明的又一目的在于提供一种动态监测调节牵拉力量的食管拉钩的使用方法;
17.1、将该装置各个部件进行拆卸消毒处理;
18.2、根据使用人群的不同,选择合适的牵拉头组装该装置;
19.3、将该装置的牵拉头置于食管外周吗,并保证柔性垫完全包裹食管;
20.4、拿持拿持柄向一既定方向牵拉;
21.5、在牵拉到合适状态时,按下调节按键,设定拉力值;
22.6、持续保持其牵拉力。
23.本发明的有益效果是:
24.1、本发明通过自拉钩的端头进行改造,在其接触食管的一端设计于食管侧壁柔性接触的柔性垫,相较于传统的硬性接触,避免了食管被硬性割伤或造成食管钝器伤的风险;同时,整个拉钩的端头设计成与食管外形相契合的圆弧状,使得牵拉开拉钩时的的力均匀作分布作用于食管上,避免局部拉力过大损伤食管;
25.2、本发明在拉钩的端头内侧部位设计薄膜压力传感器接触食管,时刻监测拉钩与食管之间的压力,从而反应为该拉钩具体的拉力,同时该装置的中央处理接收该压力信息,并于预设值进行对比分析,如果该压力过大,则调节驱动构件向牵拉的反方向驱动该装置的牵拉头运动,随后自锁,在整个运动过程中缓解突然变大的拉力,卸去食管收到的瞬间增大压力,通过一动态平衡的形式繁复调节拉钩作用于食管上的力,将不均匀的人为拉力,转换于一个值内,避免不稳定的不可控拉力,牵拉损伤食管;
26.3、基于上述的动态调节牵拉力的形式,该装置可根据不同情况、不同人体,设置其牵拉力的值的大小,方便医护人员掌控不同人体的食管的牵拉力度,同时方便不同医护人员在对同一患者进行食管牵拉时保证其牵拉气度的均;
27.4、该装置的牵拉头与其主体部分整体为可拆卸的连接的形式,一方面在方便消毒杀菌处理,另一方面则可更具实用人群的不同,如儿童、成年的区别,选用不同尺寸的牵拉头,以适应手术,达到最好的牵拉效果。
附图说明
28.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领
域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
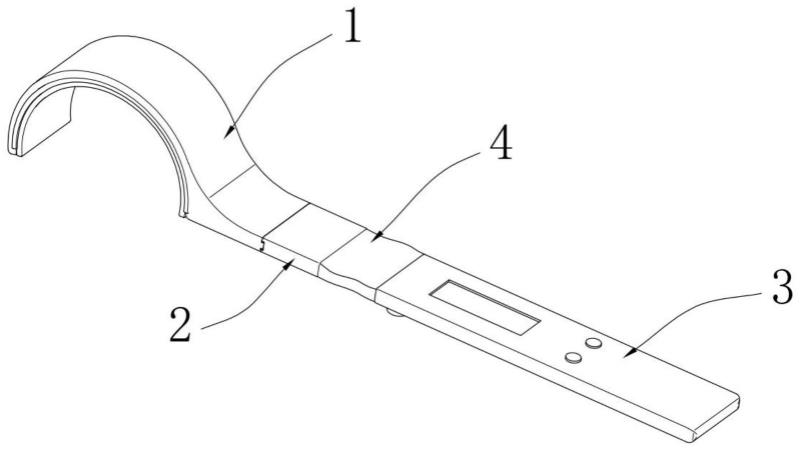
29.图1是一种动态监测调节牵拉力量的食管拉钩的整体结构示意图;
30.图2是一种动态监测调节牵拉力量的食管拉钩的内部结构示意图;
31.图3是一种动态监测调节牵拉力量的食管拉钩的牵拉头及其附属结构示意图;
32.图4是一种动态监测调节牵拉力量的食管拉钩的牵拉头又一结构示意图;
33.图5是一种动态监测调节牵拉力量的食管拉钩的柔性垫截面示意图;
34.图6是一种动态监测调节牵拉力量的食管拉钩的拿持柄内部结构示意图;
35.图7是附图6部位5处的局部放大示意图;
36.附图中,各标号所代表的部件列表如下:
37.1-牵拉头,11
‑“
t”型卡块,12
‑“
u”卡件,121-电导片,13-柔性垫,131-压力传递过渡片,132-薄膜压力传感器,14-卡槽,2-过渡连杆,21-连接端头,22-连接条,23
‑“
t”型槽,221-电阻滑块,222-导电滑块,3-拿持柄,31-显示屏,32-启停按钮,33-调节按钮,34-蓄电池,35-中央处理单元,36-滑槽,361-电阻条,362-导电条,37-齿轮,38-步进电机,39-导线,4-弹性过渡带,6-复位弹簧。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.实施例1
40.一种动态监测调节牵拉力量的食管拉钩,其特征在于,包括:牵拉头1、过渡连杆2、拿持柄3、弹性过渡带4;
41.所述过渡连杆2一端带阻尼的滑动连接于拿持柄3内腔,另一端可拆卸的卡接牵拉头1,所述弹性过渡带4固定连接在过渡连杆2与拿持柄3之间;拿持拿持柄3向一既定方向牵拉,通过过渡连杆2牵动牵拉头1向一方向运动,其中弹性过渡带4一方面为牵拉头1的回缩提供一恢复力,另一方面侧分析其二者的连接部位,避免对装置的内部造成污染,方便整个装置的消毒清洁;
42.所述牵拉头1可拆卸的连接有带有薄膜压力传感器132的柔性垫13,所述拿持柄3内设有驱动构件驱动过渡连杆2伸缩滑动,且受其内部中央处理单元35接收薄膜压力传感器132监测信息相应调控;在薄膜压力传感132在接受的压力超过既定值时,驱动构件启动,并驱动过渡连杆2朝着食管一侧运动,减缓瞬间增加的压力,以此往复,实现一动态调节的过程,调节人体牵拉食管拉钩的力矩,避免牵拉力矩较大而损伤食管;
43.所述牵拉头1整体呈圆弧状,且设有卡槽14,所述柔性垫13固定连接“u”卡件12,通过“u”卡件12卡接于牵拉头1的卡槽14内,所述牵拉头1的尾端固定设有“t”型卡块11;所述“u”卡件12外侧和卡槽14内侧契合的位置处设有卡接时接触的电导片121,电连接薄膜压力传感器132和拿持柄3;
44.所述柔性垫13内部的薄膜压力传感器132的里侧契合其接受压力的位置设有硬质
的压力传递过渡片131,使得薄膜压力传感器132接收的压力更准确,方便该装置牵拉力的判别准确,所述该压力传递过渡片131未突出至柔性垫13外侧,即该压力传递过渡片131的外侧附有薄的柔性垫体,避免其直接接触患者食管;
45.所述过渡连杆2包括连接端头21和滑动连接在拿持柄3内腔的连接条22,所述连接端头21设有契合牵拉头1“t”型卡块11的“t”型槽23,所述连接条22上下两侧设有齿条,且末端分别设有导电滑块222和电阻滑块221;所述齿条契合拿持柄3的驱动构件,导电滑块222和电阻滑块221分别接触拿持柄3内部的滑槽36的上下两侧;
46.所述“t”型卡块11的“t”型槽23贴合部位分别设有电连接的电导片121,用于电连接牵拉头1;
47.所述拿持柄3的驱动构件设置于其内部滑槽36的上下两侧,主体为带有齿轮37的步进电机38,所述该步进电机38的齿轮37与连接条22的齿条啮合,驱动过渡连杆2运动,所述拿持柄3滑槽36上下两侧面固定设有分别接触导电滑块222和电阻滑块221的导电条362和电阻条361;
48.所述导电滑块222和电阻滑块221的背部和滑槽36外端侧壁之间设有复位弹簧6;所述导电条362通过导线电连接中央处理单元35,所述导电滑块222通过导线39电连接“t”型槽23;
49.所述拿持柄3外部固定设有显示屏31、启停按键32以及调节按键33,所述拿持柄3内部还设有蓄电池34。
50.实施例2
51.本实施例为一种动态监测调节牵拉力量的食管拉钩的工作原理,及其具体使用方法、步骤;
52.该装置的工作原理:
53.基于上述实施例1,该装置的步进电机38通过齿轮37带动过渡连杆2的连接条22运动,最终调节其牵拉头1的运动,通过在牵拉过程中向食管方向运动,缓解其牵拉的力矩;
54.具体的,首先在牵拉过程中通过调节按键33设定既定的拉力值,在牵拉的过程中薄膜压力传感器132时刻监测其牵拉头1作用于食管表面的压力信号,将其传输至中央处理单元35分析处理,得出整个装置作用于食管的牵拉力,该牵拉力在到达上述设定的值后候,步进电机38工作带动连接条22向食管方向运动一小段距离,在其压力值缩减值达到系统设定值后,立即停止运动;
55.在整个动态调节过程中电阻滑块221配合电阻条361,以滑动变阻器的形式通过阻值变化,呈现出牵拉过程中直接的牵拉力,方便操作者掌控其牵拉力。
56.该装置的具体使用方法及其步骤;
57.1.将该装置各个部件进行拆卸消毒处理;
58.2.根据使用人群的不同,选择合适的牵拉头1组装该装置;
59.3.将该装置的牵拉头1置于食管外周吗,并保证柔性垫13完全包裹食管;
60.4.拿持拿持柄3向一既定方向牵拉;
61.5.在牵拉到合适状态时,按下调节按键33,设定拉力值;
62.6.持续保持其牵拉力。
63.综上所述,1、本发明通过自拉钩的端头进行改造,在其接触食管的一端设计于食
管侧壁柔性接触的柔性垫,相较于传统的硬性接触,避免了食管被硬性割伤或造成食管钝器伤的风险;同时,整个拉钩的端头设计成与食管外形相契合的圆弧状,使得牵拉开拉钩时的的力均匀作分布作用于食管上,避免局部拉力过大损伤食管;
64.2、本发明在拉钩的端头内侧部位设计薄膜压力传感器接触食管,时刻监测拉钩与食管之间的压力,从而反应为该拉钩具体的拉力,同时该装置的中央处理接收该压力信息,并于预设值进行对比分析,如果该压力过大,则调节驱动构件向牵拉的反方向驱动该装置的牵拉头运动,随后自锁,在整个运动过程中缓解突然变大的拉力,卸去食管收到的瞬间增大压力,通过一动态平衡的形式繁复调节拉钩作用于食管上的力,将不均匀的人为拉力,转换于一个值内,避免不稳定的不可控拉力,牵拉损伤食管;
65.3、基于上述的动态调节牵拉力的形式,该装置可根据不同情况、不同人体,设置其牵拉力的值的大小,方便医护人员掌控不同人体的食管的牵拉力度,同时方便不同医护人员在对同一患者进行食管牵拉时保证其牵拉气度的均;
66.4、该装置的牵拉头与其主体部分整体为可拆卸的连接的形式,一方面在方便消毒杀菌处理,另一方面则可更具实用人群的不同,如儿童、成年的区别,选用不同尺寸的牵拉头,以适应手术,达到最好的牵拉效果。
67.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
68.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1