一种电动缝合装置的制作方法
1.本发明涉及医疗器械领域,特别涉及一种电动缝合装置。
背景技术:
2.腹腔镜手术是一门新发展起来的微创方法,是未来手术方法发展的必然趋势。随着工业制造技术的突飞猛进,相关学科的融合为开展新技术、新方法奠定了坚定的基础,加上医生越来越娴熟的操作,使得许多过去的开放性手术已被腔内手术取而代之,大大增加了手术选择的机会。腹腔镜手术传统方法是首先插入一个叫做"trocar"的管道状工作通道,以后一切操作均通过这个管道进行;用特制的加长手术器械在视频监视下完成与开放手术同样的步骤,达到同样的手术效果。近年来,具有创伤小、恢复快、痛苦轻、治愈率高等优点的微创外科发展迅速,腹腔镜作为微创外科的代表,在外科领域被广泛应用,涉及许多病种和手术,受到患者欢迎,而且随着科学技术的不断进步,手术器械不断改进创新,腹腔镜的施展空间将会越来越大。
3.由于腹腔或者胸腔内空间的限制,微创手术器械必然是比较小且比较长的,才可实现精确的操作。在微创腹腔手术内操作难度相对大的无疑是缝合。过去,通过内窥镜外科手术对身体器官或组织的缝合是通过使用尖利的金属缝合针实现的,所述缝合针的一端系有一定长度的缝合材料,外科医生操作缝合针刺透并穿过身体组织,将缝合材料拖过身体组织,一旦缝合材料被拖过身体组织,外科医生就对缝合材料打个结,缝合材料的结点允许外科医生调节缝合材料的张力以适应正在被缝合的特定组织并且控制组织的近似 值、闭合、联结或其它情况。对外科医生来说控制张力的能力是极其重要的,而与正在进行的外科手术程序的类型无关。在传统的缝合中需要用双手协调操作缝合针和持针器械在有限的空间内连续缝合,许多外科医生发现此操作是极其困难的,并且缝合针的裸露也容易导致意外发生,比如会刺破患者其他器官或伤到外科医生、护士。
4.随着技术的发展,半手动缝合器已经在手术中使用,在操作半手动缝合器进行手术时,通过握动击发扳机,一个循环即扳机完全握下与完全打开复位实现出针扎入缝合组织,再次握动击发扳机实现缝合针完全穿透组织、缝针归位,如没有归位,则需要多次重复握动扳机,因此一台手术需要医生连续数次手动握动击发扳机,操作费力且需要较长的缝合时间。
技术实现要素:
5.本发明要解决的是现有技术中缝合器操作费力的技术问题。
6.为解决上述技术问题,本发明提供的技术方案如下:一种电动缝合装置,包括:工作端组件、主驱动机构、弯转驱动机构和旋转驱动机构;工作端组件包括缝合组件和弯转连接管,其中,主驱动机构用于驱动针线部件往复旋转对缝合组织进行缝合,弯转驱动机构用于驱动工作端组件左右摆动以调整工作端组件相对缝合组织的位置,旋转驱动机构用于驱动工作端组件的缝合组件围绕工作端轴线实现360
度旋转,从而调整针线部件相对缝合组织的入针点位置。
7.本发明通过设置主驱动机构、弯转驱动机构和旋转驱动机构,可以方便医生调节缝合组件的位置和进行缝合操作,从而可以提高缝合效率,缩短手术时间。
8.进一步地,所述电动缝合装置还包括支撑组件,支撑组件包括:主骨架、副骨架、右外壳、左外壳、手柄;动力电源可拆卸地安装于手柄内,主骨架和副骨架用于固定安装主驱动机构、弯转驱动机构和旋转驱动机构。
9.进一步地,电动缝合装置还包括延长管,延长管的远端连接工作端组件,延长管用于穿过手术通道,把工作端组件推送至需要缝合的部位。
10.进一步地,主驱动机构包括:主驱动电机、偏心轮、缓冲器、延长杆、柔性轴;主驱动电机驱动偏心轮旋转带动缓冲器做直线往复运动,缓冲器的远端与延长杆的近端连接,延长杆的远端与柔性轴的近端固定连接,柔性轴的远端与工作端组件连接。
11.进一步地,工作端组件包括缝合组件和弯转连接管,其中,缝合部件包括:齿条部件、齿轮部件、连杆部件、基座;其中,齿条部件与齿轮部件通过齿形咬合,柔性轴与齿条部件的一端固定连接;连杆部件设有销轴与齿轮部件设有的腰型孔铰接配合;连杆部件设有顶针杆基座装入基座的弧形槽内,从而形成反四边形曲柄滑块机构。
12.进一步地,主驱动机构、弯转驱动机构和旋转驱动机构可独立操作,且三者操作时互不影响。
13.进一步地,弯转驱动机构包括:弯转驱动电机、弯转电机齿轮箱部件、弯转连杆、弯转拉片和弯转关节;弯转电机齿轮箱部件包括传动螺杆和连接块,弯转驱动电机驱动传动螺杆旋转带动连接块往复直线运动,连接块与弯转连杆连接,连接块往复直线运动带动弯转连杆连接的弯转拉片推拉运动,从而带动工作端组件围绕弯转关节设有的两处连接销弯转。
14.进一步地,旋转驱动机构包括中心齿轮,中心齿轮的中心设有d型孔,延长杆穿过中心齿轮中心的d型孔;所述旋转驱动机构还包括电动驱动结构和/或手动驱动结构,其中,电动驱动结构包括:减速马达、电机齿轮;电机齿轮与中心齿轮咬合,减速马达旋转带动电机齿轮旋转,电机齿轮带动中心齿轮反向旋转,中心齿轮带动延长杆随着反向旋转,并通过柔性轴传递旋转带动工作端组件的缝合组件进行旋转运动;手动驱动结构包括:旋转头、惰性齿轮、驱动齿轮,旋转头设有内齿轮,内齿轮、惰性齿轮、驱动齿轮、中心齿轮互相咬合,手动转动旋转头,通过内齿轮、惰性齿轮、驱动齿轮、中心齿轮带动延长杆旋转,并通过柔性轴传递旋转从而带动工作端组件的缝合组件进行旋转运动。
15.进一步地,电动缝合装置还包括操控电控组件,操控电控组件包括按键模块和电路模块;其中,按键模块包括:主按键、左按键、右按键;其中,主按键用于控制主驱动机构和弯转驱动机构,左按键和右按键用于控制旋转驱动机构。
16.进一步地,左按键、右按键对称设计,方便操作者左右手互换操作。
17.采用这样的设计后,本发明至少具有以下优点:(1)发明通过设置主驱动机构、弯转驱动机构和旋转驱动机构,可以方便医生调节缝合组件的位置和进行缝合操作,从而可以提高缝合效率,缩短手术时间。(2)本发明的电动缝合装置操作方便,可实现单手操作,减少器械调整操作耗时,节省手术时间。(3)本发明结构简单,效果好,且成本低,易工艺实现。
附图说明
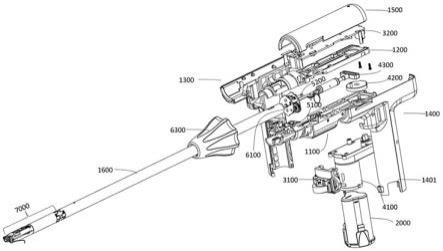
18.上述仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,以下结合附图与具体实施方式对本发明作进一步的详细说明图1是本发明电动缝合装置的部件分解示意图;图2是本发明电动缝合装置的部件剖面结构示意图;图3是本发明主驱动机构的结构示意图;图4是本发明工作端组件的剖面示意图;图5是本发明工作端内部结构示意图;图6是本发明工作端组件的运行原理示意图;图7是本发明弯转驱动机构示意图;图8为本发明旋转驱动机构示意图;图9为本发明旋转驱动机构剖面结构示意图;附图标记,1100主骨架、1200副骨架、1300右外壳、1400左外壳、1401手柄、1500上壳、1600延长管、2000动力电源、3100按键模块、3101左按键、3102右按键、3103主按键、3200电路模块、4100主驱动电机、4200偏心轮、4300缓冲器、4400延长杆、4500柔性轴、5100弯转电机齿轮箱部件、5101传动螺杆、5102连接块、5200弯转连杆、5300弯转拉片、5400弯转关节、5500连接销、6100齿轮箱部件、6101中心齿轮、6102电机齿轮、6103惰性齿轮、6104驱动齿轮、6200减速马达、6300旋转头、6301内齿轮、7000工作端组件、7100齿条部件、7200齿轮部件、7201腰型孔、7300连杆部件、7301顶针杆基座、7302销轴、7400基座、7401弧形槽、7500弯转连接管、7600针线部件。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.在本文中,“上”、“下”等仅用于表示相关部分之间的相对位置关系,而非限定这些相关部分的绝对位置。
21.以下每个部件靠近操作者的一端定义为近端,远离操作者的一端定义为远端。该近端、远端的表达只用于使描述简单、清楚,不应该理解为对本发明的任何限定。
22.参见附图1-5,一种电动缝合装置,包括:工作端组件7000、主驱动机构、弯转驱动机构和旋转驱动机构;工作端组件7000包括缝合组件和弯转连接管,其中,主驱动机构用于驱动针线部件7600往复旋转对缝合组织进行缝合,弯转驱动机构用于驱动工作端组件7000左右摆动调整工作端组件7000相对缝合组织的位置,旋转驱动机构用于驱动缝合组件围绕缝合组件轴线实现360度旋转,从而调整针线部件7600相对组织缝合的入针点位置。
23.所述电动缝合装置还包括支撑组件,支撑组件包括:主骨架1100、副骨架1200、右外壳1300、左外壳1400、手柄1401;动力电源2000可拆卸地安装于手柄内,主骨架和副骨架用于固定安装主驱动机构、弯转驱动机构和旋转驱动机构。动力电源2000为主驱动机构、弯转驱动机构和旋转驱动机构提供电源驱动,动力电源可以快速插接至手柄1401处,主骨架
1100、副骨架1200作为安装三个驱动机构的主要支撑件,用于实现对三个驱动机构的固定安装。
24.电动缝合装置还设有延长管1600,延长管1600的远端连接工作端组件7000,延长管用于穿过手术通道,把工作端组件7000推送至需要缝合的部位。
25.主驱动机构包括:主驱动电机4100、偏心轮4200、缓冲器4300、延长杆4400、柔性轴4500。主驱动电机4100驱动偏心轮4200旋转带动缓冲器4300做直线往复运动,缓冲器4300的远端与延长杆4400连接,延长杆4400的远端与柔性轴4500固定连接,柔性轴4500的远端与工作端组件7000连接;主驱动机构通过柔性轴4500驱动工作端组件7000进行缝合操作。其中,缓冲部件包括:缓冲弹簧、缓冲杆、缓冲轴套;缓冲部件能够实现拉动和推动过程的缓冲。优选地,延长杆与柔性轴的固定方式包括但不限于焊接、过盈压装等。柔性轴4500是刚性很小且具有弹性可自由弯曲传动的轴,用于联接不在同一轴线和不在同一方向或有相对运动的两轴以传递旋转运动和扭矩,能把旋转运动和转矩灵活地传到任何位置。
26.参见附图5-6,工作端组件7000包括缝合组件和弯转连接管7500,其中缝合部件包括:齿条部件7100、齿轮部件7200、连杆部件7300、基座7400。其中,齿条部件7100与齿轮部件7200通过齿形咬合,柔性轴4500与齿条部件7100的一端固定连接。连杆部件7300设有销轴7302与齿轮部件7200设有的腰型孔7201铰接配合;连杆部件7300设有顶针杆基座7301装入基座7400的弧形槽7401内,从而形成反四边形曲柄滑块机构。通过柔性轴4500推拉齿条部件7100往复运动可联动齿轮部件7200旋转,齿轮部件7200旋转带动连杆部件7300摆动,带动顶针杆基座7301在弧形槽7401往复摆动,从而实现缝合操作。
27.主驱动机构、弯转驱动机构和旋转驱动机构可独立操作,且三者操作时互不影响。参见附图7,弯转驱动机构包括:弯转驱动电机、弯转电机齿轮箱部件5100、弯转连杆5200、弯转拉片5300和弯转关节5400。弯转驱动电机驱动弯转电机齿轮箱部件5100输出动力,弯转电机齿轮箱部件5100包括传动螺杆5101和连接块5102,弯转驱动电机驱动传动螺杆5101旋转带动连接块5102往复直线运动,连接块5102与弯转连杆5200连接,连接块5102往复运动带动弯转连杆5200连接的弯转拉片5300推拉运动,从而带动工作端组件7000围绕弯转关节5400设有的两处连接销5500弯转。柔性轴4500穿过弯转关节5400处,当工作端组件弯转时,位于中心的柔性轴4500也会随着弯转,柔性轴4500由于其固有的特性,因此弯转后也可以传动推拉力和扭转力。
28.参见附图8-9,旋转驱动机构包括中心齿轮6101,中心齿轮6101的中心设有d型孔,延长杆穿过中心齿轮中心的d型孔,旋转驱动机构包括电动和/或手动驱动结构,其中电动驱动结构包括:减速马达6200、电机齿轮6102,中心齿轮6101和电机齿轮6102组成齿轮箱部件6100;工作端组件的弯转连接管7500与弯转关节铰接连接。电机齿轮与中心齿轮咬合,减速马达6200旋转带动电机齿轮旋转,电机齿轮旋转带动中心齿轮6101反向旋转,从而带动延长杆4400随着反向旋转,并通过柔性轴4500传递旋转从而带动工作端组件7000的缝合组件进行旋转运动。通过截面为d型结构的延长杆4400与中心齿轮6101中心设置的d型孔配合,可以使得主驱动机构驱动延长杆的直线往复运动和旋转驱动机构驱动延长杆的旋转运动互不影响。
29.手动驱动结构包括:旋转头6300、惰性齿轮6103、驱动齿轮6104,旋转头6300设有内齿轮6301,内齿轮6301、惰性齿轮6103、驱动齿轮6104、中心齿轮6101互相咬合,手动转动
旋转头6300,可以通过内齿轮6301、惰性齿轮6103、驱动齿轮6104、中心齿轮6101带动延长杆旋转,并通过柔性轴4500传递旋转从而带动工作端组件7000的缝合组件进行旋转运动。当同时设置手动和电动驱动结构时,可以实现电动旋转与手动旋转操作的任意切换。
30.参见附,1、9,进一步地,电动缝合装置还包括操控件电控组件,操控电控组件包括按键模块3100和电路模块3200。按键模块3100包括:主按键3103、左按键3101、右按键3102。其中,主按键用于控制主驱动机构和弯转驱动机构,左按键和右按键用于控制旋转驱动机构。其中左按键3101、右按键3102对称设计,方便操作者左右手互换操作器械。电路模块3200预设程序用于整体电控系统的控制,包括电机驱动,电压检测、电流检测、状态提示等。
31.本领域技术人员在考虑说明书及实施例公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
32.应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1