神经外科术后体位干预的姿态矫正系统的制作方法
1.本技术属于医疗康复治疗设备领域,具体涉及神经外科术后护理的体位干预辅助装置。
背景技术:
2.神经外科术后,体位干预是护理的重要内容。30~45
°
半卧位,对颅脑外伤脑脊液鼻漏者,利于术后鼻腔及鼻窦分泌物及渗血流出;重症患者肠内营养时,可降低由于体位不当引起的误吸;对鼻饲者,可避免食物反流,促进胃肠排空,帮助肠道消化。昏迷行开颅全麻手术者,术后采取仰卧位头偏向健侧位,可确保呼吸道通畅,防止误吸呕吐物。脊髓内肿瘤手术者由于术中椎板破坏了脊柱稳定性,术后通过轴线翻身体位护理,可防止颈部过度扭转、屈伸,降低呼吸障碍。高血压脑出血者腰穿术后,6小时内取头低脚高位,可避免腰穿后头痛。
3.维持合理体位常用到柔性垫块、束缚带和专用支架。尽管束缚带和专用支架进行了舒适设计,但难免引起患者负面情绪,影响康复。
4.美国专利us61/446191(2011)公开的压力创伤预防系统,通过多传感器压力检测装置监测受试者身体所受压力和体位变化,从而通知护理员变换受试者体位,并帮助护理员确认上述体位变换。中国专利cn113749651a(2021)公开的压力评估方法,采用床面薄膜压力传感器采集人体所受压力数据,采用微软kinect传感器采集人体骨骼数据,利用上述数据进行姿势识别和评估人体相应部位压力值。以上两个方案用于预防褥疮。神经外科术后体位干预不仅关注患者身体承受压力情况,还要控制特定部位姿态。
5.中国专利cn103750841a(2015)公开了基于mems惯性传感器的人体膝关节角度无线检测系统,融合陀螺仪和加速度传感器的数据,检测步行时膝关节人体膝关节角度信息。中国专利cn211863056u(2017)公开一种医疗康复外支架,用于治疗骨折,支架主体嵌设多个传感器组,传感器组包括肌电传感器、心电传感器和运动传感器,运动传感器是加速度传感器、陀螺仪、地磁传感器和角度传感器中至少一种。
6.中国专利cn110338805a(2019)公开的孕妇姿态实时监测系统,采用设有惯性传感器的姿态检测模块,帮助使用者进行姿态判断和保持正确姿态;多个姿态检测模块粘贴在孕妇身体的多个姿态监测点位。该专利没有公开姿态检测模块的具体构造。
技术实现要素:
7.本技术要解决的技术问题是,如何改进人体姿态矫正或监测装置,从而适用于神经外科术后护理的体位干预。
8.本技术公开一种神经外科术后体位干预的姿态矫正系统。
9.该姿态矫正系统包括至少三个姿态矫正带,一个所述姿态矫正带用于环绕在人体腰腹,一个所述姿态矫正带用于环绕在人体头部,剩余的所述姿态矫正带用于环绕在人体上臂或人体脚踝,所有所述姿态矫正带均设有姿态传感单元和无线通讯单元。
10.在一些实施例中可以选择,所述姿态矫正带包括:
11.矫正器,相对两端设有矫正器搭扣,内部设有所述姿态传感单元和所述无线通讯单元;以及
12.弹性绑带,两端设有可拆卸地连接矫正器搭扣的绑带搭扣。
13.在一些实施例中可以选择,所述弹性绑带与所述矫正器的主体厚度一致。
14.在一些实施例中可以选择,所述姿态矫正带还包括配重件,该配重件:位于所述弹性绑带中部,质量与所述矫正器相同。
15.在一些实施例中可以选择,所述矫正器:表面设置为柔性硅橡胶层,或者套设在一个硅橡胶套内。
16.在一些实施例中可以选择,所述矫正器还包括震动提示单元和语音提示单元,该语音提示单元在预定时间停止运行。
17.在一些实施例中可以选择,位于人体腰腹的姿态矫正带的矫正器:朝向人体头部和脚部的两个侧面,分别设有超声波发射器;位于人体头部、人体上臂和人体脚踝的姿态矫正带的矫正器,朝向人体腰腹的一个侧面设有超声波接收器。
18.在一些实施例中可以选择,该姿态矫正系统还包括用于获取人体姿态的压力检测子系统
19.在一些实施例中可以选择,所述压力检测子系统包括胸肩部检测带、臀髋部检测带和小腿部检测带中至少一种,用于临时固定设置在病床床垫上。
20.在一些实施例中可以选择,所述胸肩部检测带与臀髋检测带的宽度不低于20cm,所述小腿检测带的宽度不低于40cm。
21.实施本技术的技术方案,可获得以下有益效果;
22.本技术公开一种神经外科术后体位干预的姿态矫正系统。该姿态矫正系统包括至少三个姿态矫正带:一个用于环绕在人体腰腹,一个用于环绕在人体头部,剩余的用于环绕在人体上臂或人体脚踝,所有姿态矫正带均设有姿态传感单元和无线通讯单元。该姿态矫正系统组成简单、设置方便,获取的姿态数据可用于确认正确姿态及许可的姿态变化范围,从而能减少束缚带和专用支架的使用,提高护理工作自动化和信息化。
附图说明
23.后面的附图应结合具体实施方式部分使用。附图中:
24.图1是实施例一的组成示意图;
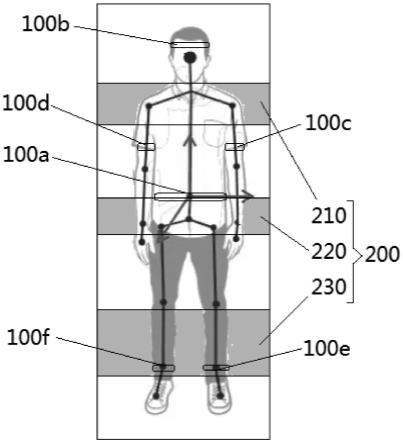
25.图2是实施例一中姿态矫正带在人体连杆模型的设置位置示意图;
26.图3是实施例一中腰腹部姿态矫正带的结构示意图;
27.图4是实施例一中头部姿态矫正带的矫正器的立体结构示意图,弹性绑带拆除。
28.附图中,各标注分别代表:
29.100a-腰腹部姿态矫正带,100b-头部姿态矫正带,100c-左上臂姿态矫正带,100d-右上臂姿态矫正带,100e-左脚踝矫正带,100f-右脚踝矫正带;
30.110-矫正器,111-矫正器搭扣,121-超声波发射器,122-超声波接收器,140-弹性绑带,141-绑带搭扣,150-配重件,200-压力检测子系统,210-胸肩检测带,220-臀髋检测带,230-小腿检测带;
31.801-腰腹部,802-头部,803-左上臂,804-右上臂,805-左脚踝,806-右脚踝。
具体实施方式
32.为充分理解本技术的内容,下面结合附图介绍实施例。
33.在本说明书中:“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”及“外”等方位指示词,是基于附图所示的观察角度。“示意图”仅用于说明下面实施例的技术特征,从示意图观测到的其他特征不一定是本技术实施例的技术特征。
34.实施例一
35.公开一种神经外科术后体位干预的姿态矫正系统。
36.请参阅图1和图2,该姿态矫正系统包括六个姿态矫正带和一个压力检测子系统200。
37.六个姿态矫正带的设置位置分别是:一个姿态矫正带用于环绕在人体腰腹部801,称为腰腹姿态矫正带100a;一个姿态矫正带用于环绕在人体头部802,称为头部姿态矫正带100b;一个姿态矫正带用于环绕在人体左上臂803,称为左上臂姿态矫正带100c;一个姿态矫正带用于环绕在人体右上臂804,称为右上臂姿态矫正带100d;一个姿态矫正带用于环绕在人体左脚踝805,称为左脚踝姿态矫正带100e;一个姿态矫正带用于环绕在人体右脚踝806,称为右脚踝姿态矫正带100f。
38.微软kinect传感器,是游戏娱乐设备,可以捕获人体姿态和动作。人体姿态捕获,是基于人体连杆模型,将人体关节抽象为若干节点。神经外科术后患者,需要卧床继续治疗和休养。如果维持特定身体姿势,只需要关注头、躯干和四肢即可,但是需要更精确的控制特定部位的姿态。因此,患者遵从医生叮嘱,在有护士监护条件下,在上述主要人体部位设置姿态矫正带,能够实现辅助监测患者身体姿态的目的。为了确定上肢姿态,选择上臂部位设置姿态矫正带。
39.请参阅图3和图4,所有姿态矫正带的构造基本一致。
40.每个姿态矫正带包括矫正器110、弹性绑带140和配重件150。
41.矫正器110的相对两端设有矫正器搭扣111,弹性绑带140,两端设有可拆卸地连接矫正器搭扣111的绑带搭扣141。
42.具体地,矫正器搭扣111是一个环形挂耳,绑带搭扣141是一个类似钥匙扣的弹簧挂钩环。二者连接后,弹性绑带140与矫正器110组成一个封闭的环带。
43.姿态矫正带在不使用时,弹性绑带140与矫正器110是相互分离的。使用时,先将弹性绑带140的一端与矫正器110的一侧连接,将矫正器110对正要检测的人体部位,将弹性绑带140包绕该人体部位一周后在将另一端与与矫正器110的另一侧连接。
44.矫正器110内设有主电路板、电源单元、震动提示单元和语音提示单元。主电路板上设有姿态传感单元、无线通讯单元、电源单元、处理单元和存贮单元,从而组成一个嵌入式计算机系统。
45.姿态传感单元可以是cn103750841a(2015)公开的mems惯性传感器,也可以是一个陀螺仪传感器,用于获取所在人体部位的方向角度及其变化的数据,这些数据能够被处理单元处理而获得具体人体部位保持特定姿态的持续时间。以上方位角数据和姿态持续时间数据可以通过无线通讯单元上传到一个护士站终端、医院数据中心服务器或护士手持的移
动终端。护士站终端、服务器或移动终端内,设有相应的应用软件处理上述数据,从而确认、设定或修改正确姿态及许可的姿态变化范围,并且设置相应的姿态矫正(提示)条件和方式。姿态矫正可以通过震动提示单元和语音提示单元直接提示佩戴者(患者),也可以通过病房内智能对讲器直接提示佩戴者,也可以发送到护士站终端、护士手持移动终端,由护士执行。
46.上述语音提示单元在预定时间停止运行。例如夜间睡眠时间和午休时间,以免干扰相同病房内的其他患者。
47.矫正器110的电路和有关部件,采用嵌入式设备领域常规设计,也与智能手机、智能手表等常见个人移动设备的组成类似,在此无需赘述。
48.弹性绑带140与矫正器110的主体厚度一致。采用上述结构,可以让患者佩戴舒适。如果人体在矫正器110所在一侧受到压力,弹性绑带140也能承受压力,矫正器110不单独受压。
49.配重件150:位于弹性绑带140中部,质量与矫正器110相同。采用上述结构,如果矫正器110位于患者卧床时的侧立面(例如侧卧时在腹部),可以防止姿态矫正带因为矫正器110较重而偏转。
50.具体地,弹性绑带140中部设有容纳仓,容纳仓设有可打开的封口。配重件150是实心金属块,套设在硅橡胶套或纺织布套中,放在容纳仓内。
51.矫正器110:表面设置为柔性硅橡胶层,或者套设在一个硅橡胶套内。采用上述结构,可以防止矫正器110被意外碰撞而损坏内部电路,也能在接触人体时提高舒适度。
52.腰腹姿态矫正带100a的矫正器110:朝向人体头部和脚部的两个侧面,分别设有超声波发射器121。位于人体头部、人体上臂和人体脚踝的姿态矫正带的矫正器110,朝向人体腰腹的一个侧面设有超声波接收器121。
53.采用上述结构,可以测量腰腹姿态矫正带100a与头部姿态矫正带100b、左上臂姿态矫正带100c、右上臂姿态矫正带100d、左脚踝矫正带100e和右脚踝矫正带100f之间的距离。上述距离数据与姿态传感单元获取的方向角度数据,可结合人体卧床姿态可能的变化范围,评估评估腰腹部、头部、四肢的相对位置。
54.压力检测子系统200是压力膜传感器的组合体,用于获得人体对承重的病床或座椅施加的压力数据,从而能够估算人体姿势,具体请参阅美国专利us61/446191(2011)。但是单独使用压力检测子系统200,无法判断人体部位的朝向方位。压力检测子系统200与六个姿态矫正带结合,可以将压力检测数据与姿态矫正带的数据结合起来,用于获取人体特定部位的姿态。
55.压力检测子系统200包括胸肩部检测带210、臀髋部检测带220和小腿部检测带230。胸肩部检测带210和臀髋部检测带220宽度为25cm。小腿检测带的宽度为50cm。
56.胸肩部检测带210、臀髋部检测带220和小腿部检测带230,彼此独立,用于临时固定设置在病床床垫上。采用上述结构,可以按照需要选择任何一个检测带安装使用,与采用覆盖整幅病床的压力膜检测系统相比,设置灵活、成本低,能够满足神经外科术后护理的需要。
57.实施例二
58.公开一种神经外科术后体位干预的姿态矫正系统。
59.该姿态矫正系统是对实施例一的改进,主要改进之处是:取消压力检测子系统200、左脚踝矫正带100e和右脚踝矫正带100f、上臂姿态矫正带100d;还要取消左上臂姿态矫正带100c和右上臂姿态矫正带100d中的一个。
60.该姿态矫正系统的其他方面与实施例一基本一致。
61.该姿态矫正系统可用于维护“30~45
°
半卧位”。该体位不涉及下肢,所以只需要检测腰腹、头部和左(或右)上臂的方向角,不需要检测人体压力数据,就可以准确识别正确体位和允许的变化范围。
62.实施例三
63.公开一种神经外科术后体位干预的姿态矫正系统。
64.该姿态矫正系统是对实施例一的改进,主要改进之处是:取消左脚踝矫正带100e、右脚踝矫正带100f和小腿部检测带230。
65.该姿态矫正系统的其他方面与实施例一基本一致。
66.该姿态矫正系统可用于维护“仰卧位头偏向健侧位”。该体位不涉及下肢,但是对肩胸部位要求更严格,所以需要检测腰腹、头部、左上臂和右上臂的方向角,还需要检测肩胸部位压力和臀髋部压力,就可以准确识别正确体位和允许的变化范围。
67.实施例四
68.公开一种神经外科术后体位干预的姿态矫正系统。
69.该姿态矫正系统是对实施例一的改进,主要改进之处是:取消左上臂姿态矫正带100c和右上臂姿态矫正带100d。
70.该姿态矫正系统的其他方面与实施例一基本一致。
71.该姿态矫正系统可用于维护“头低脚高位”。该体位不涉及上肢,所以需要检测腰腹、头部、双脚裸的方向角,还需要检测肩胸部位压力、臀髋部压力和小腿部压力,就可以准确识别正确体位和允许的变化范围。
72.实施例五
73.公开一种神经外科术后体位干预的姿态矫正系统。
74.该姿态矫正系统是对实施例一的改进,主要改进之处是:取消配重件150;弹性绑带140由两段组成,而且该两段的结合处重合长度可调整。即:姿态矫正带的构造,近似于常见的皮质表带手表。
75.该姿态矫正系统的其他方面与实施例一基本一致。
76.以上所有实施例,旨在介绍本技术的技术构思及特点,使本领域技术人员了解和实施本技术的技术方案,但不构成对本技术保护范围的任何限制。对上述实施例的简单改动或等效变换,均在本技术保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1