心腔内三维超声成像优化系统及优化方法与流程
本发明涉及心内超声成像,尤其涉及一种心腔内三维超声成像优化系统及优化方法。
背景技术:
1、随着社会经济和医疗卫生条件的发展,人类预期寿命显著提高,但同时与老龄化相关疾病的病例数量也在增加。其中,心脏类疾病由于发病率高,而且几乎所有形式的心脏病都与老龄化具有强相关性,让医学界尤为关注。
2、在心脏病诊疗方面,手术一直是不可替代的临床手段。传统的开胸手术中,为了让术者能够触及患者的心脏,需要让患者心脏在术中暴露于外部环境,这不仅在术中对患者的身体造成了较大创伤,而且由于创口大,术后容易出现并发症。近年来逐渐兴起的心脏介入手术,通过穿刺体表血管,将介入导管送到心脏内的目标位置对病变部位进行诊疗。该技术对患者的创伤小、手术时间短,可以有效减少患者痛苦,缩短术后恢复时间,还能够降低术后并发症的不利影响,与开胸手术相比具有明显优势,临床应用日益广泛。
3、为了顺利完成介入手术,术者在术中必须持续了解患者的心脏结构、介入导管处于心腔内的什么位置,这需要借助影像技术。在心脏影像方面,心腔内超声心动图(ice)技术凭借相对较低的成本、无电离辐射和较好的实时性,优势较为明显。但是,传统的心腔内超声成像方法仅能向术者提供二维影像,术者要根据二维图像在脑中想象出目标部位的三维空间形态、大小、与周边组织的关系,这对术者的经验和技术提出了很高的要求,在二维图像转化为三维想象方面的学习曲线较长。
4、要解决这一难题,目前临床使用的方式是在介入导管中植入位置传感器,该传感器基于磁定位/电定位/磁电结合定位。系统先对心脏做三维标测,然后对照静态参考物构造出心脏的三维空间模型。此类系统的弊端在于:首先,介入导管直接接触心脏内壁获取电信号时,可能导致患者不适而有意移动;其次,患者自身的呼吸、心跳等无意运动,也会对标测造成较大干扰;然后,使用环境中的电磁干扰、金属器件的存在和电场分布不均匀。这些因素都会影响标测的效果,进而影响三维建模的精准度。
5、此外,困扰临床的另一大难点在于,此类系统为了满足磁/电定位的要求,往往围绕手术台设置若干个位置探测器,导致其结构复杂,操作较为繁琐,定位时间较久,且系统对每个扫描面的定位校准也比较慢。进而导致此类系统构造三维空间模型慢,实时性不佳,与临床期望的快速、准确相比存在较大差距。这也在客观上限制了心腔内三维超声成像技术在临床的推广使用。
6、因此,对于心腔内三维超声成像的现状而言,需要一种结构简便、容易部署、且能够实现快速成像的系统及方法。
技术实现思路
1、因此,本发明的目的在于提供一种心腔内三维超声成像优化系统及优化方法,采用逐步校准法,将多角度的二维超声图像数据,利用指纹数据差异值进行比对后,逐步校准,通过ssim测量函数和aha函数的组合,得到新的指纹比较函数,能够准确快速的对两幅图像进行比较,并挑选出所有图像中,差异最小的两幅图像,计算过程更加详细精确,避免太多对硬件结构的依赖,结构更简单。
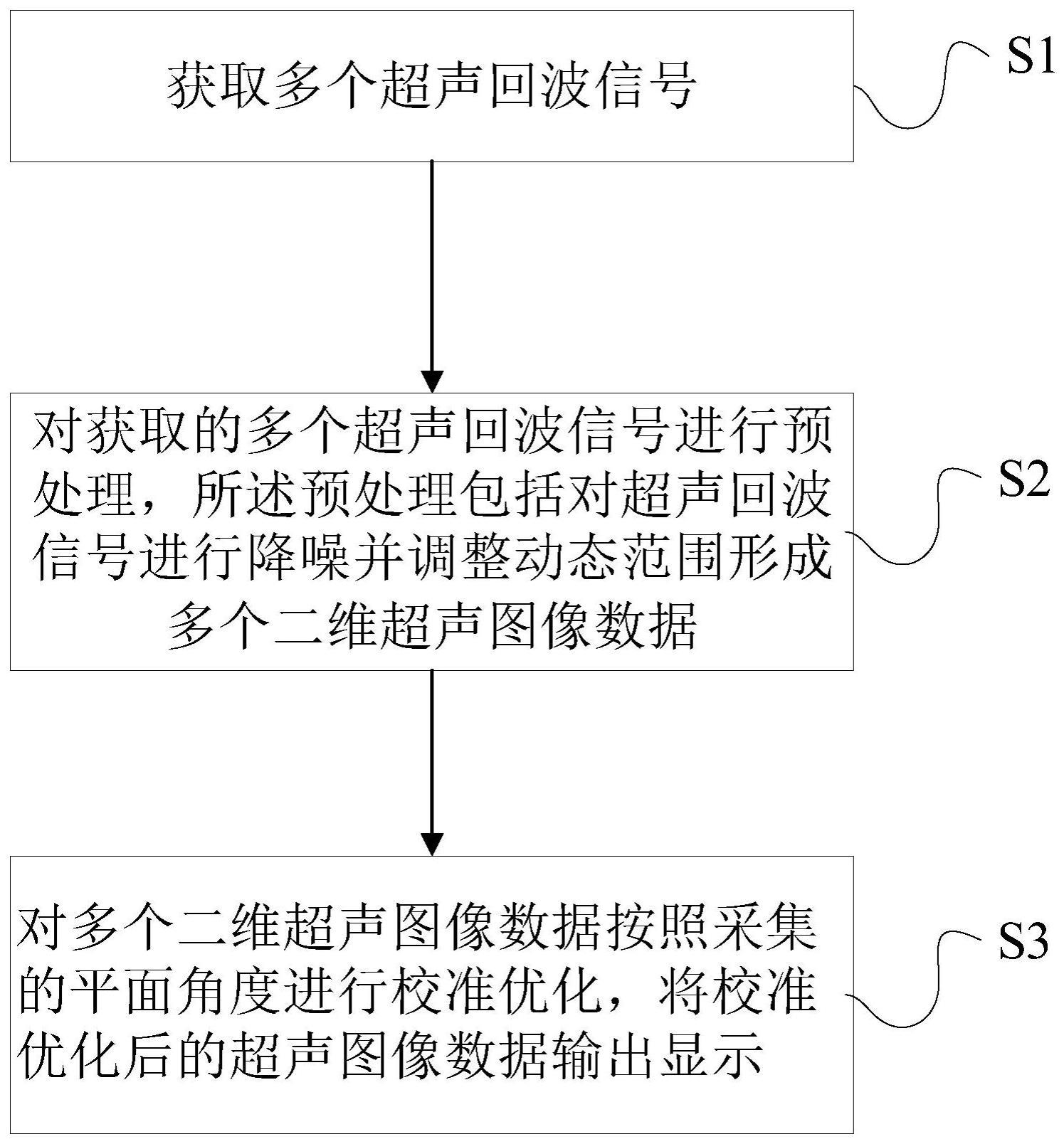
2、为了实现上述目的,本发明的一种心腔内三维超声成像优化方法,包括以下步骤:s1、获取多个超声回波信号;s2、对获取的多个超声回波信号进行预处理,所述预处理包括对超声回波信号进行降噪并调整动态范围形成多个二维超声图像数据;s3、对多个二维超声图像数据按照采集的平面角度及指纹数据差异值进行校准优化,将校准优化后的超声图像数据输出显示。
3、进一步优选的,所述对多个超声图像数据按照平面角度进行校准优化,包括如下步骤:
4、s301、将采集到的多个二维超声图像数据,按照采集角度排列成二维超声图像数据集;
5、s302、选取任一角度的二维超声图像数据作为校准的初始平面θi;
6、s303、以校准的初始平面为垂直方向建立直角坐标系,将相邻的下一角度二维超声图像数据θi-1,投影到初始平面上,对相邻的下一角度二维超声图像数据θi-1进行校准;
7、s304以校准后的二维超声图像数据θi-1作为新的初始平面,继续建立直角坐标系,对相邻的下一角度二维超声图像数据θi-2进行校准,重复迭代s303直至完成二维超声图像数据集中所有角度的二维超声图像数据的校准。
8、进一步优选的,所述对多个二维超声图像数据按照采集的平面角度进行校准优化还包括:
9、对下一角度二维超声图像数据θi-1进行校准时,
10、以θi为基准,将θi-1进行偏移,每次偏移角度设置为δθ,根据如下公式:θi-1±nδθ=θi-1±nδθ
11、将偏移的平面θi-1±nδθ投影到垂直面θi上,记为(θi-1±nδθ)′,提取其与θi的指纹数据差异值;
12、将θi-1及其所有偏移平面的指纹数据差异值与θi的指纹数据差异值进行对比,得到差异最小的平面,记为θ′i-1,将θ′i-1作为校准后的θi-1。
13、进一步优选的,所述指纹数据差异值采用如下公式计算得出:
14、fx-y=ahax-y-10×ssim(x,y)
15、其中,ahax-y为相比较的两幅图像的均值哈希值,ssim(x,y)为相比较的两幅图像的ssim函数值。
16、进一步优选的,计算指纹数据差异值中的均值哈希值时,包括以下步骤:
17、将相比较的两幅图像缩小至8*8的尺寸,使每一副图像包含64个像素;
18、将缩小尺寸后的两幅图像转为64灰度级的灰度图像,使每副图像所有像素点共有64种颜色;
19、计算两幅灰度图像的灰度平均值,将两幅灰度图像的每个像素的灰度值均与该图像的灰度平均值进行比较,将大于或等于灰度平均值的像素记为1,小于灰度平均值的像素记为0,将两幅灰度图像的像素值分别记录为二进制数;
20、计算两个二进制数的汉明距离作为两幅图像的哈希值。
21、进一步优选的,计算相比较的两幅图像的ssim函数值采用如下公式计算:
22、ssim(x,y)=f(l(x,y),c(x,y),s(x,y))=[l(x,y)]α[c(x,y)]β[s(x,y)]γ
23、其中,α为亮度对比函数l(x,y);β为对比度对比函数c(x,y)的权重;γ为结构对比函数s(x,y)的权重,且α、β、γ>0。
24、本发明还提供一种心腔内三维超声成像优化系统,用于实施上述心腔内三维超声成像优化方法,包括信号接收模块,处理模块,图像优化模块;
25、所述信号接收模块用于获取多个超声回波信号;
26、所述处理模块对获取的多个超声回波信号进行预处理,所述预处理包括对超声回波信号进行降噪并调整动态范围形成多个二维超声图像数据;
27、所述图像优化模块对多个二维超声图像数据按照采集的平面角度进行校准优化,将校准优化后的超声图像数据输出显示。
28、在上述任意一项实施例中进一步优选的,还包括信号发射模块,所述信号发射模块用于按照设定好的方式发射超声信号。
29、在上述任意一项实施例中进一步优选的,还包括数据缓冲区模块,所述数据缓冲区模块用于缓存接收到的超声回波信号。
30、在上述任意一项实施例中进一步优选的,所述处理模块包括信号处理模块和图像处理模块;所述信号处理模块用于对接收到的超声回波信号进行滤波;所述图像处理模块将滤波后的信号数据进行降噪,动态范围调整形成超声图像数据。
31、本技术公开的一种心腔内三维超声成像优化系统及优化方法,采用逐步校准法,将多角度的二维超声图像数据,利用指纹数据差异值进行比对后,逐步校准,通过ssim测量函数和aha函数的组合,得到新的指纹比较函数,能够准确快速的对两幅图像进行比较,并挑选出所有图像中,差异最小的两幅图像,计算过程更加详细精确,避免太多对硬件结构的依赖,结构更简单。
32、传统心内成像在进行定位时,为了满足磁/电定位的要求,往往围绕手术台设置若干个位置探测器,导致其结构复杂,操作较为繁琐,定位时间较久,且系统对每个扫描面的定位校准也比较慢。进而导致此类系统构造三维空间模型慢,实时性不佳,与临床期望的快速、准确相比存在较大差距。本发明通过计算指纹数据差异值,能够快速对平面进行校准,所耗费的时间成本,操作成本,以及所需的额外软硬件成本均大幅减小,降低了定位所耗费的成本,使得三维定位变得快速,准确,成本低。
- 还没有人留言评论。精彩留言会获得点赞!