一种手术机械臂的制作方法
1.本说明书涉及医疗器械领域,特别涉及一种手术机械臂。
背景技术:
2.手术机器人应用在外科手术上,能够辅助医生执行夹持、切除、切割、缝合等操作,具有手术创口小、操作精细和视野清晰等优点。通常,手术机器人包括床旁机械臂塔和机械臂组成,其中床旁机械臂塔用于为机械臂提供支撑,床旁机械臂塔会占用手术台旁的大量空间,导致床旁机械臂塔的医护人员活动空间有限。
技术实现要素:
3.本说明书实施例之一提供一种手术机械臂,该手术机械臂包括悬吊组件和臂组件;所述臂组件包括依次连接的升降臂、主臂、联动臂和操纵器;所述悬吊组件包括导轨和滑动件,所述导轨用于设置于外部支撑物上,所述滑动件可移动地配合于所述导轨,所述升降臂设置于所述滑动件上;其中,所述导轨为所述滑动件提供沿第一方向和第二方向的平移自由度,所述第一方向垂直于所述第二方向。
4.在一些实施例中,所述导轨包括第一轨道和第二轨道,所述第一轨道用于沿第一方向固定于所述外部支撑物上,所述第二轨道沿第二方向可移动地设置于所述第一轨道上,所述滑动件可移动地配合于所述第二轨道。
5.在一些实施例中,所述操纵器预设有远端不动点,所述臂组件用于控制所述操纵器围绕所述远端不动点执行平摆运动和/或俯仰运动。
6.在一些实施例中,所述升降臂设置为沿第一轴线方向伸缩,所述第一轴线布置为经过所述远端不动点,所述第一轴线方向垂直于所述第一方向和所述第二方向。
7.在一些实施例中,所述主臂包括构造成l型的横臂和竖臂,所述横臂与所述升降臂绕所述第一轴线可转动地连接,所述竖臂平行于所述第一轴线布置。
8.在一些实施例中,所述臂组件还包括重力平衡机构,所述重力平衡机构设置于所述升降臂内且与所述主臂传动相连,所述重力平衡机构用于至少部分平衡所述主臂对所述升降臂施加的沿重力方向的力。
9.在一些实施例中,所述联动臂包括彼此可转动地连接的第一臂节和第二臂节,所述第一臂节与所述竖臂可转动地连接,所述第二臂节与所述操纵器转动连接;所述联动臂形成为平行联动机构。
10.在一些实施例中,所述联动臂还包括位置调节机构,所述位置调节机构用于在所述联动臂运动过程中维持所述第二臂节始终与所述竖臂保持平行。
11.在一些实施例中,所述位置调节机构包括传动轮、传动绳和张紧轮,所述传动轮分别设置于所述第一臂节和所述第二臂节的两端,所述传动绳绕接在所述传动轮上,所述张紧轮抵接在所述传动绳上以张紧和/或放松所述传动绳。
12.在一些实施例中,所述臂组件还包括扭矩平衡机构,所述扭矩平衡机构设置在所
述主臂内,所述扭矩平衡机构用于至少部分平衡所述联动臂对所述主臂施加的扭矩。
13.在一些实施例中,所述扭矩平衡机构包括弹性件和平衡绳,所述弹性件的一端与所述主臂的内壁连接,所述弹性件的另一端与所述平衡绳的一端连接,所述平衡绳的另一端连接于所述联动臂;所述弹性件的弹力能够通过所述平衡绳作用于所述联动臂以至少部分平衡所述联动臂对所述主臂施加的扭矩。
14.根据上述手术机械臂的结构,悬吊组件可以悬挂于天花板等外部支撑物上,并为臂组件提供支撑,可以让出手术台周围的空间,为医护人员提供更多的活动空间。并且,悬吊组件还包括导轨和滑动件,滑动件能带动臂组件沿导轨滑动,导轨和滑动件的配合不仅能实现臂组件更便捷的移动,还能够扩大臂组件的活动范围。
附图说明
15.本说明书将以示例性实施例的方式进一步说明,这些示例性实施例将通过附图进行详细描述。这些实施例并非限制性的,在这些实施例中,相同的编号表示相同的结构,其中:
16.图1a是根据本说明书一些实施例所示的手术机械臂的应用场景示意图;
17.图1b是根据本说明书一些实施例所示的手术机械臂的应用场景的侧视图;
18.图2是根据本说明书一些实施例所示的悬吊组件的结构示意图;
19.图3是根据本说明书一些实施例所示的臂组件的结构示意图;
20.图4是根据本说明书一些实施例所示的联动臂的结构示意图;
21.图5是根据本说明书一些实施例所示的扭矩平衡机构的结构示意图。
22.附图标记说明:
23.1、臂组件;11、升降臂;111、壳体;112、伸缩杆;12、主臂;121、横臂;122、竖臂;123、加强件;13、联动臂;131、第一臂节;132、第二臂节;133、驱动装置;134、位置调节机构;135、传动轮;1351、第一轮;1352、第二轮;1353、第三轮;1354、第四轮;136、传动绳;1361、第一传动绳;1362、第二传动绳;137、张紧轮;138、第一虚拟杆;139、第二虚拟杆;14、操纵器;141、柔性关节;15、扭矩平衡器;151、弹性件;152、平衡绳;2、悬吊组件;21、导轨;211、第一轨道;2111、第一导向结构;212、第二轨道;22、滑动件;3、手术台;4、轨枕;p、远端不动点;v1、第一方向;v2、第二方向;a1、第一轴线;pm、俯仰运动方向;sm、摆动运动方向。
具体实施方式
24.为了更清楚地说明本说明书实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本说明书的一些示例或实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图将本说明书应用于其它类似情景。除非从语言环境中显而易见或另做说明,图中相同标号代表相同结构或操作。
25.应当理解,本文使用的“系统”、“装置”、“单元”和/或“模块”是用于区分不同级别的不同组件、元件、部件、部分或装配的一种方法。然而,如果其他词语可实现相同的目的,则可通过其他表达来替换所述词语。
26.如本说明书和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其它的步骤或元素。
27.本说明书中使用了流程图用来说明根据本说明书的实施例的系统所执行的操作。应当理解的是,前面或后面操作不一定按照顺序来精确地执行。相反,可以按照倒序或同时处理各个步骤。同时,也可以将其他操作添加到这些过程中,或从这些过程移除某一步或数步操作。
28.手术机械臂可以是应用于内窥镜微创手术的机械臂,其辅助医生精准控制手术器械来执行各种手术动作。在手术过程中,手术机械臂需要通过床旁机械臂塔稳定地支撑在手术台上方或旁边,常见的床旁机械臂塔体积较大,占用空间较多。因此,本说明书的实施例提供一种手术机械臂,该手术机械臂的悬吊组件可以将臂组件吊挂在天花板等支撑物上,而无需设置床旁机械臂塔,以让出手术台旁的空间。
29.在一些实施例中,手术机械臂可以包括单孔手术机械臂,单孔手术机械臂可以应用于单孔介入手术。示例地,对于单孔手术机械臂而言,由于治疗过程中只需要在患者的身上开一个介入切孔,即可实现手术过程中的全部器械介入,其所需的自由度也相对较少,因此,可以对手术机械臂的结构进行简化。
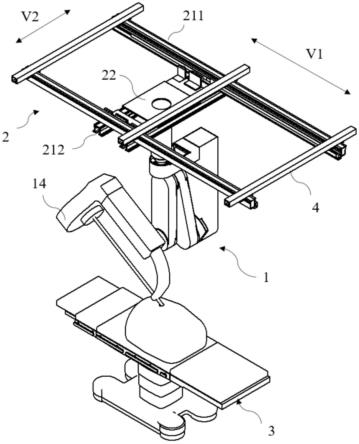
30.图1a是根据本说明书一些实施例所示的手术机械臂的应用场景示意图;
31.图1b是根据本说明书一些实施例所示的手术机械臂的应用场景的侧视图。
32.如图1a和图1b所示,本说明书的实施例提供一种手术机械臂,该手术机械臂包括悬吊组件2和臂组件1,悬吊组件2可以是为臂组件1提供支撑的组件。
33.在一些实施例中,臂组件1可以包括依次连接的升降臂11、主臂12、联动臂13和操纵器14,升降臂11、主臂12和联动臂13的运动可以操控操纵器14执行升降、俯仰和平摆等至少一种动作。在一些实施例中,对于悬置安装的臂组件而言,升降臂11可以为操纵器14提供升降自由度,主臂12可以为操纵器14提供绕远端不动点(例如图3中提及的远端不动点)执行平摆动作的转动自由度,联动臂13可以为操纵器14提供绕远端不动点执行俯仰动作的转动自由度。有关臂组件1的更详细的实施例可以参见图3至图5及其相关描述。
34.在一些实施例中,悬吊组件2包括导轨21,导轨21用于设置于外部支撑物上,外部支撑物可以是手术室的天花板、顶棚或吊顶等外部结构。悬吊组件2还包括滑动件22,滑动件22可移动地配合于导轨21,升降臂11设置于滑动件22上,滑动件22可以带动升降臂11沿导轨21滑动,其中,导轨21可以为滑动件22提供沿第一方向v1和第二方向v2的平移自由度,第一方向v1垂直于第二方向v2。有关悬吊组件2的更详细的实施例可以参见图2及其相关描述。
35.在一些手术室应用场景的示例中,导轨21可以铺设在天花板上,第一方向v1和第二方向v2与天花板保持平行,且第一方向v1可以平行于手术台3的长度方向,第二方向v2可以平行于手术台3的宽度方向,方便滑动件22带动臂组件1在手术台3范围内自由活动。
36.根据上述手术机械臂的结构,悬吊组件2可以悬挂于天花板等外部支撑物上,并为臂组件1提供支撑,可以让出手术台3周围的空间,为医护人员提供更多的活动空间。并且,悬吊组件2还包括导轨21和滑动件22,滑动件22能带动臂组件1沿导轨21滑动,导轨21和滑动件22的配合不仅能实现臂组件1更便捷的移动,还能够扩大臂组件1的活动范围。
37.图2是根据本说明书一些实施例所示的悬吊组件2的结构示意图。
38.如图2所示,在一些实施例中,导轨21可以包括第一轨道211和第二轨道212,第一轨道211和第二轨道212分别为滑动件22提供沿第一方向v1和第二方向v2的平移自由度。
39.在一些实施例中,第一轨道211用于沿第一方向v1固定于外部支撑物上。在一些实施例中,第一轨道211可以嵌设在外部支撑物的内部,仅向外露出轨道面。在一些实施例中,第一轨道211可以通过卡接、焊接、紧固件连接等多种方式固定在外部支撑物的表面。在一些实施例中,外部支撑物的表面可以设置有多条轨枕4,第一轨道211可以固定在轨枕4上,轨枕4可以缓冲第一轨道211对外部支撑物的作用力。
40.在一些实施例中,第二轨道212沿第二方向v2可移动地设置于第一轨道211上。在一些实施例中,第一轨道211上形成有第一导向结构2111,第一导向结构2111可以是凹轨滑道或凸轨滑道;第二轨道212上形成有滑块或滚轮,滑块或滚轮可移动地配合于第一导向结构2111,使第二轨道212能够相对于第一轨道211沿第一方向v1移动。
41.在一些实施例中,滑动件22可移动地配合于第二轨道212。在一些实施例中,第二轨道212上形成有第二导向结构,第二导向结构也可以是凹轨滑道或凸轨滑道;滑动件22可移动地配合于第二导向结构,且能够相对于第二轨道212沿第二方向v2移动。
42.根据第一轨道211、第二轨道212和滑动件22的连接方式,第二轨道212能够带动滑动件22沿第一方向v1移动,滑动件22能够相对于第二轨道212沿第二方向v2滑动,则滑动件22能够实现沿第一方向v1和第二方向v2的平移自由度,从而为臂组件1提供沿第一方向v1和第二方向v2的平移自由度。
43.在一些实施例中,第一轨道211可以为两条平行轨道,第二轨道212的两端分别可移动地配合于第一轨道211,第一轨道211可以为第二轨道212的两端形成支撑和限位,可以提高第二轨道212连接到第一轨道211上的连接稳定性。
44.在一些实施例中,第二轨道212可以为两条平行轨道,滑动件22构造为平板状,且滑动件22的两侧分别第二轨道212滑动连接,则第二轨道212可以为滑动件22的两侧形成支撑,提高了滑动件22连接到第二轨道212上的连接稳定性。在一些实施例中,臂组件1可以设置在滑动件22的中部位置,滑动件22的中部位置可以是位于两条第二轨道212之间的区域。
45.在一些实施例中,滑动件22可以通过手动的方式沿导轨21移动。示例地,医护人员可以对臂组件1施加沿第一方向v1的牵拉力,使第二轨道212沿第一轨道211滑动,接着医护人员继续对臂组件1施加沿第二方向v2的牵拉力,使滑动件22沿第二轨道212滑动,直到臂组件1的操纵器14靠近患者的介入切孔处。在一些实施例中,滑动件22也可以通过电机与传动带、齿轮齿条等形成配合,实现自动滑动。
46.在一些实施例中,悬吊组件2还包括制动装置(图中未示出),制动装置设置在导轨21上,用于控制滑动件22在导轨21上驻停。在一些实施例中,制动装置可以包括电磁铁,电磁铁具有通电产生磁性、断电磁性消失的性质;该电磁铁可以设置在第二导轨21上,当需要滑动件22驻停时,电磁铁通电产生磁性,使第二导轨21能够吸附驻停在第一导轨21上,并且同时能为滑动件22提供吸附力,使滑动件22驻停在第二导轨21上。在一些实施例中,电磁铁也可以分别设置在第一导轨21和滑动件22上,并且基于同样的原理使第二导轨21和滑动件22驻停。在悬吊组件2上设置制动装置,不仅能使滑动件22快速驻停在所需的位置,还能在臂组件1执行手术操作的过程中,防止滑动件22滑动,保证臂组件1的稳定性。
47.图3是根据本说明书一些实施例所示的臂组件1的结构示意图。以下将对本说明书实施例所涉及的臂组件1进行详细说明,需要注意的是,以下实施例仅用于解释本技术,并不构成对本技术的限定。
48.在一些实施例中,操纵器14预设有远端不动点p,远端不动点p是臂组件1在执行手术操作时空间位置保持不变的点,臂组件1中的主臂12和联动臂13可以分别用于控制操纵器14围绕远端不动点p执行平摆运动和/或俯仰运动。其中,操纵器14的平摆运动可以是以远端不动点p为圆心,在水平面内往复摆动的运动,具体可参见图3中的箭头sm所示的方向;操纵器14的俯仰运动可以是以远端不动点p为圆心,在竖直平面内往复摆动的运动,具体可参见图3中的箭头pm所示的方向。
49.在一些实施例中,操纵器14上设置有多个柔性关节141(图中未示出),柔性关节141用于操纵手术器械运动,示例地,柔性关节141可以连接并控制内窥镜、夹钳、持针钳、手术刀等器械。在手术应用场景中,操纵器14的远端不动点p可以位于或靠近患者的介入切孔处,柔性关节141从介入切孔伸入患者体内执行夹持、切除、切割、缝合等操作。
50.在一些实施例中,臂组件1的升降臂11设置为沿第一轴线a1方向伸缩,其中,第一轴线a1方向垂直于第一方向v1和第二方向v2,示例地,当手术机械臂设置在天花板上时,第一轴线a1可以是竖直方向。第一轴线a1可以布置为经过远端不动点p,当升降臂11伸缩时,远端不动点p沿第一轴线a1方向移动,方便调整操纵器14的远端不动点p靠近患者的介入切孔位置。
51.在一些实施例中,升降臂11包括壳体111和伸缩杆112,壳体111与滑动件22固定相连,伸缩杆112设置为能够相对于升降臂11的第一轴线a1方向伸缩。在一些实施例中,伸缩杆112可以是通过电动推杆,电动推杆能够自动调节伸缩长度。
52.在一些实施例中,臂组件1的主臂12包括构造成l型的横臂121和竖臂122,横臂121与升降臂11绕第一轴线a1可转动地连接,竖臂122平行于第一轴线a1布置。在一些实施例中,横臂121的一端与升降臂11的伸缩杆112绕第一轴线a1可转动地连接,横臂121的另一端与竖臂122的一端固定相连,在横臂121绕第一轴线a1转动的过程中,竖臂122始终平行于第一轴线a1方向转动,这样,竖臂122能够带动操纵器14在水平方向上做平摆运动。
53.在一些实施例中,主臂12还可以包括加强件123,该加强件123设置在横臂121与竖臂122连接的位置,用于提高横臂121与竖臂122之间的强度。
54.在一些实施例中,臂组件1还包括重力平衡机构(图中未示出),重力平衡机构设置于升降臂11内且与主臂12传动相连,重力平衡机构用于至少部分平衡主臂12对升降臂11施加的沿重力方向的力,该力可以包括主臂12、联动臂13和操纵器14的重力所引起的力。在一些实施例中,重力平衡机构可以完全平衡主臂12对升降臂11施加的沿重力方向的力;在一些实施例中,主臂12对升降臂11施加的沿重力方向的力中的一部分力由重力平衡机构平衡,另一部分力由升降臂11自身承担。通过设置重力平衡机构能够减轻升降臂11承受的力,避免主臂12的横臂121与升降臂11的伸缩杆112连接处的应力过大,保证横臂121相对于伸缩杆112转动的流畅性。
55.在一些实施例中,重力平衡机构可以通过产生与主臂12对升降臂11施加的沿重力方向的力大小相等、方向相反的力,从而抵消主臂12对升降臂11施加的沿重力方向的力。在一些实施例中,重力平衡机构包括但不限于配重块、机械式拉簧、恒力弹簧、磁性弹簧和气
缸平衡机构等的任意一种。
56.图4是根据本说明书一些实施例所示的联动臂13的结构示意图。
57.结合图3和图4所示,在一些实施例中,臂组件1的联动臂13包括彼此可转动地连接的第一臂节131和第二臂节132,第一臂节131与竖臂122可转动地连接,第二臂节132与操纵器14转动连接;其中,第一臂节131与竖臂122之间的转动轴线、第二臂节132与第一臂节131之间的转动轴线、第二臂节132与操纵器14之间的转动轴线彼此平行,且均可以垂直于第一轴线a1方向。
58.在一些实施例中,联动臂13形成为平行联动机构,平行联动机构可以是具有平行四边形连杆机构的联动关系的机构。示例地,如图3所示,平行联动机构可以引入第一虚拟杆138和第二虚拟杆139,其中虚拟杆在此仅为了便于理解,并不是联动臂13实际设置的杆。第一虚拟杆138可以与第一臂节131平行,第二虚拟杆139可以与第二臂节132平行,第一虚拟杆138和第二虚拟杆139交接处的旋转轴线可以经过操纵器14的远端不动点p,或者,第一虚拟杆138和第二虚拟杆139的交接点与远端不动点p重合,这样,在第一臂节131和第二臂节132运动过程中,能够保证操纵器14的远端不动点p始终保持不动。
59.在一些实施例中,联动臂13还包括驱动装置133,驱动装置133与第一臂节131传动相连,用于驱动第一臂节131转动,其中,传动相连是指驱动装置133通过诸如联轴器、减速器等传动件连接到第一臂节131上,驱动装置133通过该连接关系能够将扭矩等力或转动运动传递到第一臂节131。在一些实施例中,驱动装置133包括但不限于电机、马达等。
60.当驱动装置133驱动第一臂节131相对于主臂12转动时,第二虚拟杆139的两端点保持不动,第一臂节131带动第二臂节132做平面运动,在运动过程中,第一臂节131和第一虚拟杆138之间始终保持平行,第二臂节132和第二虚拟杆139之间始终保持平行。
61.在一些实施例中,联动臂13还包括位置调节机构134,位置调节机构134用于在联动臂13运动过程中维持第二臂节132始终与竖臂122保持平行,换言之,在第一臂节131转动的过程中,位置调节机构134能够调节第二臂节132的姿态,使其始终与竖臂122保持平行。通过设置位置调节机构134,仅通过第一臂节131和第二臂节132即可实现四连杆平行联动的作用,简化了联动臂13的结构。在一些实施例中,第一臂节131和第二臂节132可以包括中空的壳体111,位置调节机构134设置在壳体111内,壳体111可对位置调节机构134起到防尘、防水的作用。
62.如图3和图4所示,在一些实施例中,位置调节机构134包括传动轮135和传动绳136,传动轮135分别设置于第一臂节131和第二臂节132的两端,传动绳136绕接在传动轮135上,第一臂节131和第二臂节132之间可以通过传动轮135和传动绳136连接,以实现联动运动。
63.在一些实施例中,传动轮135可以为四个,包括第一轮1351、第二轮1352、第三轮1353和第四轮1354,传动绳136可以为两根,包括第一传动绳1361和第二传动绳1362。在一些实施例中,第一轮1351和第二轮1352分别可转动地设置在第一臂节131的两端,且第一轮1351与主臂12固定相连,第二轮1352与第二臂节132固定相连,第一传动绳1361绕接在第一轮1351和第二轮1352上以传递扭矩。第三轮1353和第四轮1354分别可转动地设置在第二臂节132的两端,且第三轮1353与第一臂节131固定相连,第四轮1354与操纵器14固定相连,第二传动绳1362绕接在第三轮1353和第四轮1354上以传递扭矩。其中,这里的固定相连可以
是传动轮135与对应的臂组件1的壳体111保持相对静止的连接方式。
64.在一些实施例中,位置调节机构134还包括张紧轮137,张紧轮137抵接在传动绳136上以张紧和/或放松传动绳136。通过张紧轮137可以调节传动绳136与传动轮135之间摩擦力,防止传动绳136相对于传动轮135打滑。
65.在一些实施例中,第一臂节131和第二臂节132的中间位置可以分别设置两个张紧轮137,两个张紧轮137分别抵压在传动绳136上。在一些实施例中,第一臂节131和第二臂节132上可以设置有调节螺母,张紧轮137可以设置在调节螺母上,通过旋转调节螺母可以调节张紧轮137对传动绳136的抵压力。在一些实施例中,张紧轮137还可以用于微调第一臂节131和第二臂节132之间夹角,当张紧轮137对传动绳136的抵压力改变时,第二臂节132相对于第一臂节131的夹角会随之改变,从而可以在术前校准阶段通过调节张紧轮137来校准第二臂节132,使第二臂节132调整到平行于第一轴线a1的位置。
66.根据上述联动臂13的结构,联动臂13的运动可以包括以下过程:首先,驱动装置133驱动第一臂节131转动,此时第一轮1351相对于第一臂节131转动,通过传动绳136带动第二轮1352相对于第一臂节131转动。接着,第二轮1352带动第二臂节132相对于第一臂节131转动,第一臂节131转动带动第三轮1353相对于第二臂节132转动。最后,第三轮1353带动第四轮1354相对于第二臂节132转动,第四轮1354带动操纵器14相对于第二臂节132转动。基于上述联动臂13的运动过程,当第一臂节131相对于主臂12的竖臂122做往复转动时,会带动操纵器14相对于远端不动点p执行俯仰运动。
67.图5是根据本说明书一些实施例所示的扭矩平衡机构的结构示意图。
68.在一些实施例中,臂组件1还包括扭矩平衡机构,扭矩平衡机构设置在主臂12内,扭矩平衡机构用于至少部分平衡联动臂13对主臂12施加的扭矩,其中,联动臂13对主臂12施加的扭矩可以是联动臂13的重力对主臂12产生的重力矩等,扭矩平衡机构可以通过产生与该重力距大小相等、方向相反的力矩来抵消该重力矩。在一些实施例中,扭矩平衡机构可以完全平衡联动臂13对主臂12施加的扭矩;在一些实施例中,联动臂13对主臂12施加的扭矩中的一部分扭矩由扭矩平衡机构平衡,另一部分扭矩由主臂12自身承担或者通过驱动装置133进行补偿。
69.通过设置扭矩平衡机构能够减轻主臂12承受的扭矩,当联动臂13转动到所需的空间位置时,其所受到的驱动力消失后,联动臂13不会因自身重力而再发生转动,从而使联动臂13和操纵器14保持在当前位置,提高联动臂13的使用可靠性。
70.如图5所示,在一些实施例中,扭矩平衡机构包括弹性件151和平衡绳152,弹性件151的一端与主臂12的内壁连接,弹性件151的另一端与平衡绳152的一端连接,平衡绳152的另一端连接于联动臂13;弹性件151的弹力能够通过平衡绳152作用于联动臂13以至少部分平衡联动臂13对主臂12施加的扭矩。在一些实施例中,弹性件151可以是弹簧等。
71.当联动臂13相对于主臂12的竖臂122转动一定角度时,联动臂13能够通过平衡绳152带动弹性件151处于变形状态(例如,伸长状态或压缩状态),弹性件151处于变形状态时的弹力能够通过平衡绳152反作用于联动臂13,使得弹力能够相对于联动臂13与竖臂122之间的转动轴线产生平衡力矩,该平衡力矩能够至少部分平衡联动臂13的重力相对于该转动轴线产生的扭矩。
72.本技术实施例可能带来的有益效果包括但不限于:(1)手术机械臂的悬吊组件可
以悬挂于天花板等外部支撑物上,并为臂组件提供支撑,可以让出手术台周围的空间,为医护人员提供更多的活动空间。并且,悬吊组件还包括导轨和滑动件,滑动件能带动臂组件沿导轨滑动,导轨和滑动件的配合不仅能实现臂组件更便捷的移动,还能够扩大臂组件的活动范围;(2)在悬吊组件上设置制动装置,不仅能使滑动件快速驻停在所需的位置,还能在臂组件执行手术操作的过程中,防止滑动件滑动,保证臂组件的稳定性;(3)通过设置重力平衡机构能够减轻升降臂承受的力,避免主臂的横臂与升降臂的伸缩杆连接处的应力过大,保证横臂相对于伸缩杆转动的流畅性;(4)通过设置扭矩平衡机构能够减轻主臂承受的扭矩,当联动臂转动到所需的空间位置时,其所受到的驱动力消失后,联动臂不会因自身重力而再发生转动,从而使联动臂和操纵器保持在当前位置,提高联动臂的使用可靠性。需要说明的是,不同实施例可能产生的有益效果不同,在不同的实施例里,可能产生的有益效果可以是以上任意一种或几种的组合,也可以是其他任何可能获得的有益效果。
73.上文已对基本概念做了描述,显然,对于本领域技术人员来说,上述详细披露仅仅作为示例,而并不构成对本说明书的限定。虽然此处并没有明确说明,本领域技术人员可能会对本说明书进行各种修改、改进和修正。该类修改、改进和修正在本说明书中被建议,所以该类修改、改进、修正仍属于本说明书示范实施例的精神和范围。
74.同时,本说明书使用了特定词语来描述本说明书的实施例。如“一个实施例”、“一实施例”、和/或“一些实施例”意指与本说明书至少一个实施例相关的某一特征、结构或特点。因此,应强调并注意的是,本说明书中在不同位置两次或多次提及的“一实施例”或“一个实施例”或“一个替代性实施例”并不一定是指同一实施例。此外,本说明书的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。
75.同理,应当注意的是,为了简化本说明书披露的表述,从而帮助对一个或多个发明实施例的理解,前文对本说明书实施例的描述中,有时会将多种特征归并至一个实施例、附图或对其的描述中。但是,这种披露方法并不意味着本说明书对象所需要的特征比权利要求中提及的特征多。实际上,实施例的特征要少于上述披露的单个实施例的全部特征。
76.针对本说明书引用的每个专利、专利申请、专利申请公开物和其他材料,如文章、书籍、说明书、出版物、文档等,特此将其全部内容并入本说明书作为参考。与本说明书内容不一致或产生冲突的申请历史文件除外,对本说明书权利要求最广范围有限制的文件(当前或之后附加于本说明书中的)也除外。需要说明的是,如果本说明书附属材料中的描述、定义、和/或术语的使用与本说明书所述内容有不一致或冲突的地方,以本说明书的描述、定义和/或术语的使用为准。
77.最后,应当理解的是,本说明书中所述实施例仅用以说明本说明书实施例的原则。其他的变形也可能属于本说明书的范围。因此,作为示例而非限制,本说明书实施例的替代配置可视为与本说明书的教导一致。相应地,本说明书的实施例不仅限于本说明书明确介绍和描述的实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1