一种术中肌腱张度测量仪的制作方法
1.本实用新型涉及医疗器械技术领域,尤其涉及一种术中肌腱张度测量仪。
背景技术:
2.肌腱断裂后进行手术缝合后,需要在术中进行肌腱缝合后的张度进行测量,以便对手术效果进行评估。
3.通常的方法是在肌腱缝合后,将无菌钩一端勾住肌腱,无菌钩的另一端使用类似于弹簧秤的拉力测量仪器对肌腱的拉力进行测量。由于肌腱的张度不仅与拉力相关,还与肌腱的拉伸长度相关。因而通常的测量方法只能测得肌腱的拉力,不能测得肌腱的伸长量,因而不能得出肌腱的张度。
4.公开号为cn209611214u的专利申请公开了一种关节镜下肩袖修补术中张力测量拉钩,包括手柄、伸长杆、钩体,伸长杆、钩体为空心管,手柄前部的侧方开设穿线槽,所述穿线槽槽底与伸长杆后端连通,形成缝合线通道,手柄的后端环周设有卡槽,手柄后端卡槽处抱夹有拉力器,拉力器包括相互嵌套的内管和外管,内管的前端套设在手柄后端外部,外管套设在内管外,内管后端与外管之间设有拉力弹簧,外管的侧面沿轴向嵌设有透明窗口,透明窗口中部标记有指针,内管的侧面与透明窗口对齐设置有沿轴向延伸的力度指示条。该专利采用可视结构保证肌腱拉升拉力控制在合适的范围内,保证手术效果,避免二次撕裂。但是其只能测得拉力,而对于拉钩的位移量无法确定,因而不能体现出肌腱的张度。
5.公开号为cn109820527a的专利申请公开了一种肌腱组织张力测量装置,外芯套于内芯的中部,而筒体套于外芯的中部,内芯的两端分别装有芯帽和开有过线孔,外芯位于筒体的内部装有内挡块和伸出筒体外的指针,外芯位于筒体外朝向过线孔的一端装有外挡块和缝线钩,筒体上开有供指针伸出和移动的限位槽,并于限位槽侧设有刻度线,筒体内装有带动内挡块复位的弹簧。工作时,肌腱组织通过缝线带动外芯及其上的指针移动,从而测出人体肌腱组织的拉力。同样,其只能测得拉力,而对于拉钩的位移量无法确定,因而不能体现出肌腱的张度。
技术实现要素:
6.本实用新型所要解决的技术问题是提供一种术中肌腱张度测量仪,以便在手术中准确的同时测出肌腱的拉力和对应肌腱拉伸量。
7.为解决上述技术问题,本实用新型所采用的技术方案是:
8.一种术中肌腱张度测量仪,包括底座、转动连接在底座上的丝杠、滑动连接在底座上的滑块、设置在底座上方用于和拉伸肌腱的无菌钩挂接的拉钩以及固定设置在滑块上用于测量拉钩拉力的拉力传感器,所述丝杠与滑块螺纹传动,所述底座上还固定设置有用于带动丝杠转动的电动机。
9.进一步的,所述底座上固定设置有外壳,所述底座、电动机、丝杠、滑块和拉力传感器均设置在外壳内,所述拉钩与外壳滑动配合。
10.进一步的,所述电动机为微量电动机。
11.进一步的,所述外壳上设有用于显示拉力传感器测量数据的显示屏,所述外壳在与滑块所对应的位置设有与丝杠平行的长条形的指示窗口,所述外壳上在指示窗口一旁设有刻度线,所述滑块上在指示窗口内设有指示箭头。
12.进一步的,所述底座上固定设置有定栅,所述滑块上设有用于和定栅配合的动栅,所述定栅和动栅构成容栅传感器,所述外壳上设有用于显示拉力传感器以及容栅传感器所测得数据的显示屏。
13.进一步的,所述底座上固定设置有固定杆,所述固定杆与拉钩方向一致,所述固定杆外端铰接有定位板。
14.进一步的,所述丝杠一旁设有与其平行的导向杆,所述导向杆两端分别与底座固定连接,所述滑块与导向杆滑动连接。
15.本实用新型的积极效果为:
16.1.本实用新型设有外壳、底座、丝杠、滑块、拉钩以及拉力传感器,外壳上设有指示窗口和刻度线,电动机带动丝杠拉动拉钩和无菌钩拉动肌腱,拉力传感器测得拉力,通过刻度线得出肌腱的拉伸量,从而本实用新型可同时测得肌腱的拉力和拉伸量,使拉力和拉伸量的数据测量时更加方便和准确,操作更加容易,以便准确的对手术的结果进行评估,为进行下一步手术提供准确的数据支持。
17.2.电动机为步进电动机,从而可通过控制输送到电动机的脉冲数量对拉伸量进行控制,使拉伸量的控制和测量更加方便。
18.3.底座上设置有定栅,滑块上设有动栅,动栅和定栅构成容栅传感器,从而可以很精确的测得拉钩的位移量,进而精确得到肌腱的拉伸量。
19.4.本实用新型可通过usb数据接口与计算机进行通讯连接,并将测得的位移量和拉力数值传送到计算机进行存储和处理,以提高工作效率。
附图说明
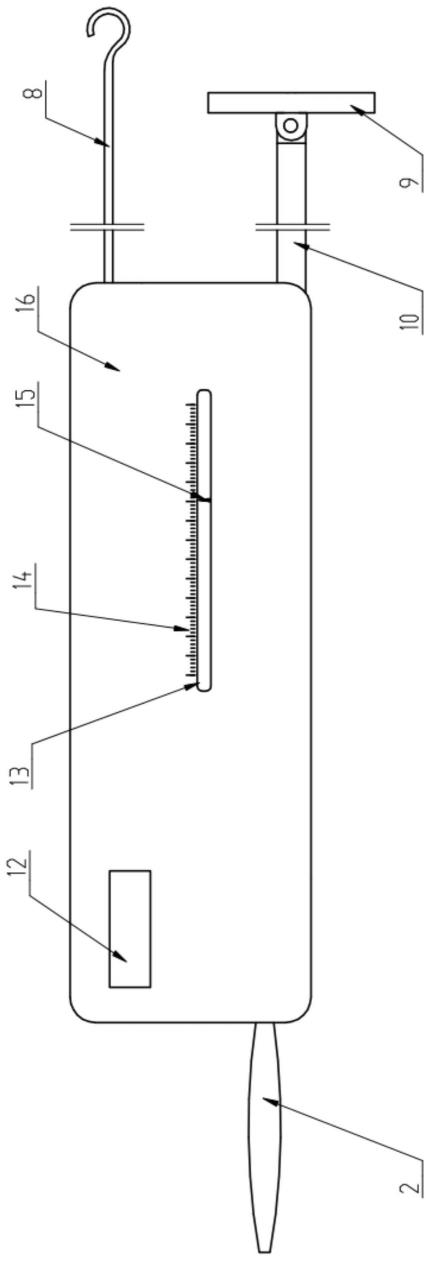
20.图1是实施例1的外形图;
21.图2是图1内部的结构示意图;
22.图3是图2的俯视图;
23.图4是实施例2的外形图;
24.图5是实施例1的使用图;
25.图中:
26.1、底座;2、手柄;3、电动机;4、导向杆;5、滑块;6、拉力传感器;7、支撑板;8、拉钩;9、定位板;10、固定杆;11、丝杠;12、显示屏;13、指示窗口;14、刻度线;15、指示箭头;16、外壳;17、无菌钩;18、肌腱。
具体实施方式
27.实施例1
28.如图2和3所示,一种术中肌腱张度测量仪,包括矩形的底座1,所述底座1左右两端分别焊接有矩形的支撑板,所述底座1上方设有与其平行的丝杠11,所述丝杠11两端分别与
对应的支撑板7贯穿转动连接,所述丝杠11上螺纹连接有矩形的滑块5。所述丝杠11两侧对称设有导向杆4,所述导向杆4的两端分别与对应的支撑板7固定连接,所述导向杆4均与滑块5贯穿滑动连接。所述滑块5上固定连接有拉力传感器6,所述拉力传感器6上设有拉钩8。左侧的支撑板7左面固定设置有与丝杠11传动连接的电动机3。
29.如图1至3所示,所述底座1上固定设置有外壳16,所述底座1、电动机3、丝杠11、滑块5、导向杆4和拉力传感器6均设置在外壳16内,所述拉钩8与外壳16滑动配合,所述外壳16左侧固定设置有手柄2。
30.所述底座1右端固定设置有向右的固定杆10,所述固定杆10右端铰接有定位板9。
31.所述外壳16内还设有控制器和电源,所述外壳16上设有显示屏12,所述电动机3、电源和拉力传感器6均与控制器电连接。所述外壳16前面在与滑块5所对应的位置设有与丝杠11平行的长条形的指示窗口13,所述外壳16在指示窗口13上方设有刻度线14,所述滑块5上在指示窗口13内设有指示箭头15。
32.如图5所示,当患者的肌腱18缝合后,将无菌钩17的一端钩住肌腱18,另一端钩在拉钩8的右端,操作者手持手柄2,将定位板9抵在患者固定的肢体上或其它固定的器械上。控制器启动电动机3,向左拉动肌腱18,然后电动机3停止运行,记录此时显示屏12上显示的拉力数值,通过刻度线14测得拉钩8的位移量,并记录。然后电动机3继续运行,随后停止,记录对应的拉力数值及拉钩8的位移量。如此反复,进而得到多组拉力和位移量。通过在术中使用本实用新型,使拉力和位移量的数据测量时更加方便和准确,操作更加容易,以便准确的对手术的结果进行评估,为进行下一步手术提供准确的数据支持。
33.实施例2
34.如图4所示,本实施例与实施例1的不同之处在于:
35.1.所述电动机3为微量电动机(或步进电动机),其采用频率固定的脉动信号进行控制,从而实现小移动距离和固定移动距离的控制。
36.2.去除实施例1中的指示窗口13、刻度线14和指示箭头15,从而使外壳16内部形成封闭的空间。因此,可防止外壳16内部受到污染。在使用完毕后,仅需对外壳16外部及外露的部件进行消毒处理。
37.控制器提供频率固定的脉动信号对电动机3的转动进行控制,从而对拉钩8的位移量进行精确控制。
38.实施例3
39.本实施例与实施例2的不同之处在于:
40.所述底座1上固定设置有定栅,所述滑块5上设有用于和定栅配合的动栅,所述动栅和定栅均与控制器电连接。所述定栅和动栅构成容栅传感器,用于测量滑块5在底座1上的位移量,其原理与数显游标卡尺相通。位移量通过显示屏12进行显示。
41.通过容栅传感器可以很精确的测得拉钩8的位移量。
42.所述外壳16内还设有与控制器电连接的寄存器,所述外壳16上设有与控制器电连接的usb数据接口,寄存器将每组测得的拉力和位移量存储到寄存器。
43.当对肌腱各组拉力和位移量测试完毕后,将无菌钩和拉钩8依次摘下,将usb数据接口通过数据线与计算机连接,计算机通过usb数据接口读取寄存器中存储的各组拉力和位移量数据并进行处理。
44.计算机在对拉力和位移量数据进行处理时,以位移量为横坐标,拉力为纵坐标形成一条拉力随位移量变化的张力曲线,并与正常的肌腱张度曲线进行对比,进而根据测得的张力曲线对当前手术的效果进行评估。
45.目前,本技术的技术方案已经进行了中试,即产品在大规模量产前的小规模实验;中试完成后,在小范围内开展了用户使用调研,调研结果表明用户满意度较高;现在已经着手准备产品正式投产进行产业化。
46.以上所述的实施例描述内容较为详细和具体,表达了本实用新型的优选实施例,仅用于说明本实用新型的技术思想及特点,其目的在于使本领域内的技术人员能够理解本实用新型的内容并据以实施,但并不仅仅局限于本实用新型,不能仅以本实施例来限定本实用新型的专利范围,即凡本实用新型所揭示的精神所做的同等变化或修饰,对于本领域的研究人员或技术人员来讲,在不脱离本实用新型的结构之内,系统内部的局部改进和子系统之间的改动、变换等,仍是本实用新型的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1