一种肠胃镜辅助支架的制作方法
1.本实用新型涉及肠胃镜技术领域,具体涉及一种肠胃镜辅助支架。
背景技术:
2.胃镜和肠镜分别是对人体的食管、胃,以及对大肠进行检查的设备,现有技术中,做胃肠镜手术时,医生往往需要长时间一手持软管部,一手固定操作部,或者由协助人员拖住并进行进管操作,检查过程的时常较长,医生难以长时间保持镜主体在胃肠道内的位置和角度,不便于检查操作,且使得医生疲劳不堪。
3.鉴于此,本案发明人对上述问题进行深入研究,遂有本案产生。
技术实现要素:
4.本实用新型的目的在于提供一种便于操作的肠胃镜辅助支架,以解决背景技术中的问题。
5.为了达到上述目的,本实用新型采用这样的技术方案:
6.一种肠胃镜辅助支架,包括支架主体;所述支架主体包括承载软管部的第一支架、承载肠胃镜操作部的第二支架、以及承载第一支架和第二支架的底座;所述第一支架包括与底座滑动连接的管体和与管体固定连接的第一架体;所述第二支架包括与管体滑动连接的杆体和与杆体固定连接的第二架体。
7.所述第一支架还包括输送软管部的输送装置;所述输送装置包括对软管部进行限位的定位支座;所述定位支座包括供软管部通过的限位口和处于限位口内的输送组件。
8.所述限位口包括第一边框;所述第一边框包括对软管部进行承载限位的限位滑槽。
9.所述限位滑槽的开口小于软管部的半径。
10.所述限位滑槽具有与软管部圆周面相匹配的弧形面。
11.所述限位口还包括与第一边框相对设置的第二边框;所述输送组件包括与限位滑槽相对设置且挤压软管部的柔性挤压轮、连接于第二边框与柔性挤压轮之间的预紧伸缩杆。
12.所述输送组件还包括驱动柔性挤压轮转动的第一驱动电机、控制第一驱动电机正转的第一脚踏开关、以及控制第一驱动电机反转的第二脚踏开关。
13.所述第二架体具有承载定位支座的承载板和驱动定位支座沿承载板的长度方向移动的第一驱动装置。
14.所述第一驱动装置包括第二驱动电机、控制第二驱动电机正转的第三脚踏开关、以及控制第二驱动电机反转的第四脚踏开关。
15.所述支架主体还包括驱动管体升降移动的第二驱动装置和驱动杆体升降移动的第三驱动装置。
16.采用上述技术方案后,一种肠胃镜辅助支架,至少具有如下有益效果:
17.在实际实施过程中,通过第一支架与第二支架对肠胃镜进行支撑,使得医生能腾出双手,便于医生对肠胃镜进行操作,也便于医生观察显示器;同时在长时间的检查过程中,医生也不易疲惫,能有效的提高医生的工作效率,进而提高检测的准确度。
附图说明
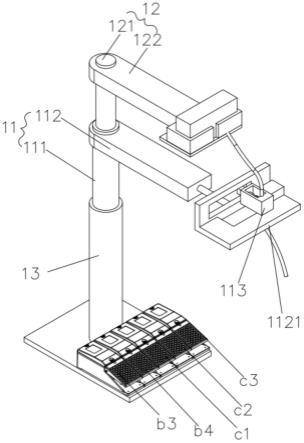
18.图1为根据本实用新型的实施例的辅助支架的结构示意图;
19.图2为根据本实用新型的实施例的输送装置的结构示意图;
20.图3为根据本实用新型的实施例的控制器的连接示意图。
21.图中:
22.第一支架11;第二支架12;底座13;管体111;第一架体112;杆体121;第二架体122;定位支座113;限位口1131;输送组件1132;第一边框a1;限位滑槽a11;第二边框a2;柔性挤压轮b1;预紧伸缩杆b2;第一脚踏开关b3;第二脚踏开关b4;承载板1121;第三脚踏开关c1;第四脚踏开关c2;备用脚踏开关c3。
具体实施方式
23.为了进一步解释本实用新型的技术方案,下面通过图1-3所示对具体实施例进行详细阐述。
24.一种肠胃镜辅助支架,包括支架主体;支架主体包括承载软管部的第一支架11、承载肠胃镜操作部的第二支架12、以及承载第一支架11和第二支架12的底座13;第一支架11包括与底座13滑动连接的管体111和与管体111固定连接的第一架体112;第二支架12包括与管体111滑动连接的杆体121和与杆体121固定连接的第二架体122。在实际实施过程中,通过第一支架11与第二支架12对肠胃镜进行支撑,使得医生能腾出双手,便于医生对肠胃镜进行操作,也便于医生观察显示器;同时在长时间的检查过程中,医生也不易疲惫,能有效的提高医生的工作效率,进而提高检测的准确度。
25.优选地,第一支架11还包括输送软管部的输送装置;输送装置包括对软管部进行限位的定位支座113;定位支座113包括供软管部通过的限位口1131和处于限位口1131内的输送组件1132。在实际实施过程中,通过输送装置对软管部进行定位,同时对软管部进行输送,便于医生操作,提高医生的工作效率。
26.优选地,限位口1131包括第一边框a1;第一边框a1包括对软管部进行承载限位的限位滑槽a11。在实际实施过程中,通过限位滑槽a11对软管部进行限位,同时在输送装置的输送过程中,限位滑槽a11对软管部进行辅助,进而提高软管部的输送效率和稳定性,进而提高医生的工作效率。
27.优选地,限位滑槽a11的开口小于软管部的半径。在实际事实上过程中,限位滑槽a11的开口小于软管部的半径,使得软管部的圆周面的较大部分露出限位滑槽a11;便于柔性挤压轮b1包覆软管部,增加接触面积提高摩擦力,便于软管部高效稳定输送。
28.优选地,限位滑槽a11具有与软管部圆周面相匹配的弧形面。在实际实施过程中,通过弧形面对软管部进行限位的同时便于软管部移动,能有效的提高输送效率。
29.优选地,限位口1131还包括与第一边框a1相对设置的第二边框a2;输送组件1132包括与限位滑槽a11相对设置且挤压软管部的柔性挤压轮b1、连接于第二边框a2与柔性挤
压轮b1之间的预紧伸缩杆b2。在实际实施过程中,预紧伸缩杆b2通过预紧力使得柔性挤压轮b1抵顶软管部,使得柔性挤压轮b1形变包覆软管部,能有效的增加软管部与柔性挤压轮b1的接触面积,进而提高软管部与柔性挤压轮b1之间的摩擦力,从而有效的提高软管部的输送效率。
30.优选地,输送组件1132还包括驱动柔性挤压轮b1转动的第一驱动电机、控制第一驱动电机正转的第一脚踏开关b3、以及控制第一驱动电机反转的第二脚踏开关b4。在实际实施过程中,通过第一脚踏开关b3和第二脚踏开关b4驱动第一驱动电机,进而控制柔性挤压轮b1转动,便于医生操作。
31.优选地,第一架体112具有承载定位支座113的承载板1121和驱动定位支座113沿承载板1121的长度方向移动的第一驱动装置。在实际实施过程中,通过第一驱动装置控制定位支座113移动,使得医生可调控软管部的方向,便于医生进行操作。
32.优选地,第一驱动装置(可以是丝杆螺母副)包括第二驱动电机、控制第二驱动电机正转的第三脚踏开关c1、以及控制第二驱动电机反转的第四脚踏开关c2。在实际实施过程,通过第三脚踏开关c1与第二脚踏开关b4控制第二驱动电机,使得定位支座113高效移动,同时便于医生进行操作。
33.优选地,支架主体还包括处于底座13上的备用脚踏开关c3。在实际实施过程中,当第一脚踏开关b3、第二脚踏开关b4、第三脚踏开关c1、以及第四脚踏开关c2中任意一个损坏时,可临时接通备用脚踏开关c3。
34.优选地,支架主体还包括驱动管体111升降移动的第二驱动装置(可以是电动升降杆)和驱动杆体121升降移动的第三驱动装置(可以是电动升降杆)。在实际实施过程中,第二驱动装置包括第三驱动电机,第三驱动装置包括第四驱动电机;辅助支架还包括控制第一驱动电机、第二驱动电机、第三驱动电机、以及第四驱动电机的控制器和与控制器无线连接的遥控器;具体的,通常管体111与杆体121的高度与病患所处的卧床位置相当,较少调整;通过遥控器进行无线遥控,能有效的提高调节效率,也便于医生进行操作。
35.本实用新型的产品形式并非限于本案图示和实施例,任何人对其进行类似思路的适当变化或修饰,皆应视为不脱离本实用新型的专利范畴。
36.虽然参照示例性实施例对本公开进行了描述,但是应当理解,本公开并不限于所公开的示例性实施例。应当对所附权利要求的范围给予最宽的解释,以使其涵盖所有这些变型例以及等同的结构和功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1