一种自动按摩机器人及多用途按摩头的制作方法
1.本实用新型属于机器人按摩领域,具体涉及一种自动按摩机器人及多用途按摩头。
背景技术:
2.现如今,由于生活节奏的加快以及工作压力的增大,使得人们的身体长时间处于高压状态,往往会感觉到疲惫劳累。与此同时,按摩机器人技术逐渐发展成熟,人们可利用按摩机器人的按摩动作缓解疲劳、放松身心、改善血液循环、加速人体新陈代谢,以达到增强免疫力、保健养生的目的。
3.现在市场上各种自动按摩理疗机器人基本上都是通过在机器人末端安装不同形状的按摩头来实现不同的按摩手法,因此存在功能单一的问题。即,受限于按摩头和驱动装置连接关系,一种按摩头只能实现一种按摩手法,无法简单以更换按摩头的方式实现功能切换。例如,实用新型专利cn 213911296u中的按摩头,只能实现局部位置的叩击动作;实用新型cn 212940491u中的按摩头,只能实现局部位置的揉捏动作。如果使用者想要在按摩过程中同时体验到医生按摩手法中的“擦法”、“推法”和“穴位按法”等多种按摩动作,就需要更换配置了不同驱动装置和按摩头的机器人。如果按摩机器人设备不便于移动,甚至还得让使用者改换按摩床位。这不仅会让按摩过程长时间中断,更严重影响使用者的体验。
技术实现要素:
4.本实用新型要解决的技术问题是,克服现有技术中的不足,提供一种自动按摩机器人及多用途按摩头。
5.为解决技术问题,本实用新型的解决方案是:
6.提供一种用于自动按摩机器人的多用途按摩头,包括法兰套筒、电动推杆、手指组件和手掌组件;其中,法兰套筒的一端以法兰面封闭另一端设开口,所述电动推杆和手指组件均设于法兰套筒中;电动推杆的一端固定在法兰面的内侧,另一端固定连接手指组件,手指组件与套筒内壁之间形成滑动配合;
7.所述手指组件包括依次布置的上盖、弹性体和手指支承件,上盖与电动推杆的端部相连,弹性体被夹持于上盖和手指支承件之间,在手指支承件的末端装有柔性的手指套;
8.所述手掌组件包括手掌支承件和手掌套;手掌支承件是一个t形中空构件,其柄部的开口空腔以过盈配合方式安装在法兰套筒的开口端;在手掌支承件的平面端装有柔性的手掌套,手掌支承件的平面端和手掌套的中部设连通的通孔,手指组件与两通孔之间为间隙配合;在电动推杆的带动下,手指组件的末端能够从手掌组件的通孔伸出或收回。
9.作为一种改进方案,所述手指组件还包括中空的缸体,所述上盖、弹性体和手指支承件的端部被封装于缸体内,手指支承件的主体部分和手指套均位于缸体之外;上盖与缸体之间为固定连接,手指支承件的端部与缸体内壁之间形成滑动配合,能沿缸体内壁滑动;缸体外表面与套筒内壁之间形成滑动配合。
10.作为一种改进方案,所述上盖的表面设有一对平行相间布置的安装耳,电动推杆的末端设一个安装耳,各安装耳上均设有通孔;上盖和电动推杆通过安装耳对接,并以销轴、螺钉或螺栓螺母组件穿入通孔实现固定。
11.作为一种改进方案,所述手指支承件的末端呈凸台状,所述手指套具有开口空腔,能以过盈配合方式安装在手指支承件的凸台状的末端位置。
12.作为一种改进方案,所述手指支承件与手指套具有相等的外径尺寸,在安装后使手指组件整体呈尺寸均一的杆状。
13.作为一种改进方案,所述手指套和手掌套是柔性硅胶套或柔性橡胶套。
14.作为一种改进方案,所述手指套或手掌套的端面呈圆形或椭圆形。
15.本实用新型进一步提供了一种自动按摩机器人,包括设于台车上控制电脑和机械臂,机械臂由多个转向节臂组成;在机械臂的末端装有前述的按摩头。
16.作为一种改进方案,所述机械臂的末端设有法兰面,所述按摩头的法兰套筒以螺钉或螺栓螺母组件固定在机械臂的法兰面上。
17.与现有技术相比,本实用新型的有益效果是:
18.1、本实用新型提供的自动按摩机器人,能通过电动推杆实现手掌套与手指套的切换使用,实现模拟手掌形状与手指形状。在机械臂的运动规划下,可以模拟医生按摩手法中的“擦法”、“推法”和“穴位按法”等多种按摩手法。因此,无需更换相应的驱动装置。
19.2、本实用新型通过机械臂和组合式按摩头的配合使用,仅使用一个按摩头就可以实现手指和手掌多种按摩手法的模拟操作。在整个按摩过程中不需要更换按摩头,也不需要为匹配按摩头而更换驱动装置甚至更换操作台车,所以不会长时间中断按摩过程。因此不仅提高了按摩效率,也让用户体验度更好。
附图说明
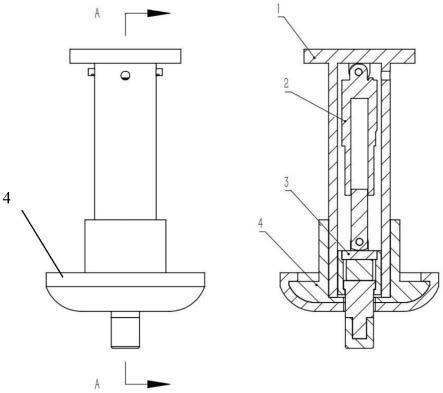
20.图1为本实用新型中按摩头的结构示意图及其剖面图。
21.图2为手指组件的结构体及其剖面图。
22.图3为手掌组件的剖面图。
23.图4为本实用新型安装在自动按摩机器人的手臂端部后的工作状态图。
24.图中附图标记:1法兰套筒;2电动推杆;3手指组件;4手掌组件;3-1上盖;3-2缸体;3-3弹性体;3-4手指支承件;3-5手指套;4-1手掌支承件;4-2手掌套。
具体实施方式
25.如图4所示,本实用新型中的自动按摩机器人,包括设于台车上控制电脑(图中未示出)和机械臂,机械臂由多个转向节臂组成;在机械臂的末端设有法兰面。
26.如图1-3所示,本实用新型设计了一种全新的按摩头。该按摩头包括法兰套筒1、电动推杆2、手指组件3和手掌组件4;其中,法兰套筒1的一端以法兰面封闭而在另一端设开口,电动推杆2和手指组件3均设于法兰套筒1中;电动推杆2的一端固定在法兰面的内侧,另一端固定连接手指组件3,手指组件3与套筒内壁之间形成滑动配合;法兰套筒1以螺钉或螺栓螺母组件固定在机械臂的法兰面上。
27.手指组件3包括依次布置的上盖3-1、弹性体3-3和手指支承件3-4,上盖3-1与电动
推杆2的端部相连,弹性体3-3被夹持于上盖3-1和手指支承件3-4之间,在手指支承件3-4的末端装有柔性的手指套3-5。
28.在上盖3-1的表面设有一对平行相间布置的安装耳,电动推杆2的末端设一个安装耳,各安装耳上均设有通孔;上盖3-1和电动推杆2通过安装耳对接,并以销轴(或者是以螺钉或螺栓螺母组件)穿入通孔实现固定。
29.手指组件3还包括中空的缸体3-2,上盖3-1、弹性体3-3和手指支承件3-4的端部被封装于缸体3-2内,手指支承件3-4的主体部分和手指套3-5均位于缸体3-2之外;上盖3-1与缸体3-2之间为固定连接,手指支承件3-4的端部与缸体内壁之间形成滑动配合,能沿缸体内壁滑动。弹性体3-3使得手指组件3在按压过程中能够给与使用者更好的体验,避免动作过于生硬。缸体3-2的外表面与套筒内壁之间形成滑动配合,便于手指组件3位移。
30.手掌组件4包括手掌支承件4-1和手掌套4-2;手掌支承件4-1是一个t形中空构件,其柄部的开口空腔以过盈配合方式安装在法兰套筒1的开口端;在手掌支承件4-1的平面端装有柔性的手掌套4-2。手掌支承件4-1的平面端和手掌套4-2的中部设有连通的通孔,手指组件3与两通孔之间为间隙配合;在电动推杆2的带动下,手指组件3的末端(及手指套3-5)能够从手掌组件4的通孔伸出或收回。当手指组件3末端处于伸出状态时,按摩头用于模拟手指“穴位按法”;通过调节伸出长度,还可以同时实现手指和手掌按压的模拟;当手指组件3末端收回使手指套3-5与手掌套4-2的表面持平时,按摩头用于模拟手掌的“擦法”和“推法”。
31.手指支承件3-4的末端呈凸台状,手指套3-5具有开口空腔,能以过盈配合方式安装在手指支承件3-4的凸台状的末端位置。手指支承件3-4与手指套3-5具有相等的外径尺寸,在安装后使手指组件3整体呈径向尺寸均一的杆状,以便能够在手掌组件4的通孔中顺利位移。
32.该产品中,手指套3-5和手掌套4-2均可拆卸、更换,其材质均可选是柔性的硅胶套或橡胶套,其端面形状均可选是圆形或椭圆形。法兰套筒1、上盖3-1、缸体3-2、手指支承件3-4、手掌支承件4-1可选由工程塑料3d打印制作,或以硬质塑料注塑制成,也可以使用金属加工而成。弹性体3-3可选硬度大于手指套3-5的硅胶材料,手掌套4-2可选厚度为5mm的硅胶材料。上盖3-1和缸体3-2可选通过超声波焊接固定。电动推杆2的技术已很成熟,可根据尺寸、位移、控制方式等条件在市售的微型电动推杆产品中进行选择,例如龙岩锶庭科技有限公司生成的la-t8-12-30-21/65-32型号产品。
33.使用方法示例:
34.使用时,先将按摩头的法兰套筒1用螺钉(或螺栓螺母组件)固定在机械臂末端的法兰面上。然后根据整套按摩动作的设计,预先在控制电脑中设置机械臂的位移控制方案。以首先进行模拟手掌按摩为例,先确认手指组件3已收回且保持与手掌组件4表面齐平;然后由机械臂带动手掌组件4沿着人体移动,在皮肤局部位置往复运动的同时赋予受控的下压力度,实现中医按摩手法中的“擦法”和“推法”。然后切换为模拟手指按压动作,根据预设按摩方案由机械臂带动按摩头运动到指定的人体穴位处。通过控制电动推杆2的伸长幅度、速度和间隔时间,由伸出手掌组件4表面的手指组件3模拟按压穴位,实现中医按摩手法中的“穴位按法”。
35.在本实用新型产品的使用过程中,可以由电脑控制整个按摩过程,从而减少医生
陪护工作量。与现有技术不同,该产品无需中途停下来更换使用不同按摩头、更不需要更换按摩主机或机器人。因此,本产品不仅大大提高了按摩效率,而且用户体验度更好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1