一种爬梯轮椅座椅实时调整装置的制作方法
1.本实用新型属于医疗康复设备技术领域,具体是涉及一种爬梯轮椅座椅实时调整装置。
背景技术:
2.轮椅是装有轮子可以帮助替代行走的椅子,分为电动和手动折叠轮椅。是用于伤员、病员、残疾人居家康复、周转运输、就诊、外出活动的重要移动工具,轮椅它不仅满足肢体伤残者和行动不便人士的代步,更重要的是方便家属移动和照顾病员,使病员借助于轮椅进行身体锻炼和参与社会活动。
3.但是轮椅在应对楼梯时,是无法进行爬梯操作的,从而就需要背着受伤的人员向上之后,再次搬运轮椅向上,这样就十分的费力费时,且针对一般劳动力不在家的家庭,就更加的麻烦。
技术实现要素:
4.本实用新型主要是解决上述现有技术所存在的技术问题,提供一种爬梯轮椅座椅实时调整装置。
5.本实用新型的上述技术问题主要是通过下述技术方案得以解决的:一种爬梯轮椅座椅实时调整装置,包括座椅本体和底部车架,所述底部车架位于座椅本体的下方,所述底部车架与座椅本体之间设置有升降机构,所述升降机构与底部车架之间前后铰接设置,所述升降机构的后侧分别设置有设备收纳箱,所述设备收纳箱的下方设置有前后缓冲装置,所述前后缓冲装置的前端与升降机构相互连接,所述前后缓冲装置的后端与底部车架相互连接,所述底部车架包括前悬臂轴、后悬臂轴和轴座,所述前悬臂轴通过轴座与后悬臂轴相互连接,所述升降机构设置在轴座的顶部,所述前悬臂轴和后悬臂轴的左右两侧均设置有支撑杆,所述支撑杆的表面套接有套筒,所述套筒的顶部插接有纵向杆,位于所述后悬臂轴上的所述纵向杆中部均设置有第一安装板,所述第一安装板上均设置有电控箱,每个所述纵向杆顶部的向外侧均插接有插接头,每个所述插接头上均插接有独立悬挂,所述底部车架的侧边四角均设置有动力箱,每个所述动力箱的底部侧边对应的支撑杆相互连接,所述独立悬挂的另一端与对应的动力箱相互连接,所述动力箱的外侧表面均转动连接有三输出的行星式行走轮,所述行星式行走轮的每个输出端均设置有麦克纳姆轮。
6.作为优选,所述座椅本体的顶部设置有脖托,所述脖托与座椅本体的连接处设置有连接头,所述脖托的背面设置有第一加强板,所述第一加强板的下方设置有第一加强箍,所述第一加强箍的两端连接在座椅本体背面的左右侧边,所述座椅本体的背面下方设置有第二加强板,所述第二加强板的后侧设置有两组第二加强箍,两组所述第二加强箍的两端连接在座椅本体的左右侧边,所述座椅本体底部的前端设置有前扩撑架,所述前扩撑架的正面底部设置有后托板,所述后托板的底部铰接设置有脚托板,所述座椅本体的左右两侧均设置有扶手底架,所述扶手底架的顶部均设置有侧扶手,所述侧扶手的顶部一侧设置有
控制器。
7.作为优选,所述升降机构包括第一电动推杆、后挡座、底板和第二安装板,所述底板设置在轴座的顶部,所述底板底部的左右两侧均转动设置有铰接座,所述铰接座与轴座相互固定连接,所述第一电动推杆和后挡座均设置在底板的顶部,所述后挡座设置在第一电动推杆的后侧,所述第一电动推杆的侧面设置有陀螺仪传感器,所述第二安装板设置在第一电动推杆的顶部,所述座椅本体设置在第二安装板的顶部,所述前扩撑架的顶部与第二安装板的底部前端通过螺栓固定连接。
8.作为优选,每个所述动力箱的顶部均设置有顶部安装架,所述顶部安装架与对应的独立悬挂的一端相互连接,每个所述动力箱靠近支撑杆的一侧设置有与其相互套接的底部安装架,每个所述动力箱的顶部均设置有多个固定杆,所述固定杆上均设置有防护罩,所述防护罩对行星式行走轮以及麦克纳姆轮进行保护。
9.作为优选,所述前后缓冲装置包括后插接座、第一连接杆、第二连接杆、第二电动推杆和后壳体,所述后插接座插接在后悬臂轴的后端,所述第一连接杆设置在后插接座的后侧,所述第二连接杆设置在后插接座的顶部后端,所述第二电动推杆的后端与插接座的底部相互转动连接,所述第二电动推杆的输出端与升降机构的后端相互转动连接,所述后壳体的套接在第二电动推杆的表面,且向下对后悬臂轴进行保护,所述后壳体的顶部位于设备收纳箱的下方,所述后壳体的前端与两个纵向杆相互连接,所述第一连接杆的后端与后壳体的内壁相互连接。
10.作为优选,所述设备收纳箱的下方设置有第三安装板,所述第三安装板的前端连接在位于后侧的两个纵向杆的顶部,所述第二连接杆的顶部向上贯穿后壳体与第三安装板相互连接。
11.本实用新型具有的有益效果:
12.1、通过设置底部车架,且其由后悬臂轴和前悬臂轴套接在轴座中设置,整个小车的前后轮子均连接在前悬臂轴和后悬臂轴内,使得整个前轮和后轮分别独立起来,当左前轮(右前轮)遇到障碍物时会碾压越过,同时右前轮(左前轮)也不会离地,保证了轮子与地面接触,后轮也有同样的越障能力。
13.2、通过在座椅本体的下方分别设置有升降机构以及前后缓冲装置由两个电动推杆通过铰链连接组成连杆机构。通过陀螺仪传感器实时检测座椅本体座面相对于地面的倾斜角度,并反馈给第二电动推杆,第二电动推杆将根据接收到的信号做出对应的伸缩动作以调整座椅座面,维持水平。在陀螺仪传感器检测到座椅倾斜时,同步第一电动推杆会上升至最高状态,避免座椅和乘坐者在座椅自动调节过程中与台阶接触,从而当在爬楼梯或者上升坡面时,能够大大的减缓对人体倾斜造成的不适感,从而使得整个机构的舒适性更强。
14.3、在整个底部车架的四角上均设置有四个行星式行走轮,每组行星式行走轮由3个麦克纳姆轮组成,通过四组行星式行走轮,让这款多动能椅子在平地上行走时,可以轻松的完成前进、后退、左右横移、斜向移动、原地旋转等多种行走方式,在遇到台阶等障碍物时,如果不能正常行驶通过的,可通过行星式结构翻越障碍。
附图说明
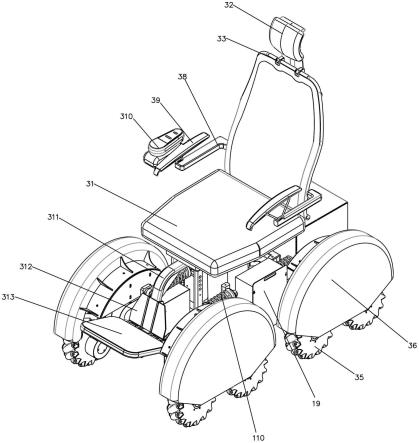
15.图1是本实用新型正面的一种立体结构示意图;
16.图2是本实用新型背面的一种立体结构示意图;
17.图3是本实用新型未安装座椅本体的一种立体结构示意图;
18.图4是本实用新型部分结构的一种立体结构示意图;
19.图5是本实用新型部分结构的一种立体结构示意图;
20.图6是图4中a处的一种放大结构示意图。
21.图中:11、后悬臂轴;12、前悬臂轴;13、轴座;14、支撑杆;15、第一安装板;16、套筒;17、纵向杆;18、插接头;19、电控箱;110、独立悬挂;111、第三安装板;21、铰接座;22、底板;23、后挡座;24、第一电动推杆;25、第二安装板;26、陀螺仪传感器;3、动力箱;31、顶部安装架;32、底部安装架;33、固定杆;34、行星式行走轮;35、麦克纳姆轮;36、防护罩;4、前后缓冲装置;41、后插接座;42、第一连接杆;43、第二连接杆;44、第二电动推杆;45、后壳体;5、设备收纳箱;61、座椅本体;62、脖托;63、连接头;64、第一加强板;65、第一加强箍;66、第二加强箍;67、第二加强板;68、扶手底架;69、侧扶手;610、控制器;611、前扩撑架;612、后托板;613、脚托板。
具体实施方式
22.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
23.实施例:一种爬梯轮椅座椅实时调整装置,如图1-图6所示,包括座椅本体61和底部车架,底部车架位于座椅本体61的下方,底部车架与座椅本体61之间设置有升降机构,升降机构与底部车架之间前后铰接设置,升降机构的后侧分别设置有设备收纳箱5,设备收纳箱5的下方设置有前后缓冲装置4,前后缓冲装置4的前端与升降机构相互连接,前后缓冲装置4的后端与底部车架相互连接,底部车架包括前悬臂轴12、后悬臂轴11和轴座13,前悬臂轴12通过轴座13与后悬臂轴11相互连接,升降机构设置在轴座13的顶部,前悬臂轴12和后悬臂轴11的左右两侧均设置有支撑杆14,支撑杆14的表面套接有套筒16,套筒16的顶部插接有纵向杆17,位于后悬臂轴11上的纵向杆17中部均设置有第一安装板15,第一安装板15上均设置有电控箱19,每个纵向杆17顶部的向外侧均插接有插接头18,每个插接头18上均插接有独立悬挂110,底部车架的侧边四角均设置有动力箱3,每个动力箱3的底部侧边对应的支撑杆14相互连接,独立悬挂110的另一端与对应的动力箱3相互连接,动力箱3的外侧表面均转动连接有三输出的行星式行走轮34,行星式行走轮34的每个输出端均设置有麦克纳姆轮35;
24.通过设置底部车架,且其由后悬臂轴11和前悬臂轴12套接在轴座13中设置,整个小车的前后轮子均连接在前悬臂轴12和后悬臂轴11内,使得整个前轮和后轮分别独立起来,当左前轮(右前轮)遇到障碍物时会碾压越过,同时右前轮(左前轮)也不会离地,保证了轮子与地面接触,后轮也有同样的越障能力,在整个底部车架的四角上均设置有四个行星式行走轮34,每组行星式行走轮34由3个麦克纳姆轮35组成,通过四组行星式行走轮34,让这款多动能椅子在平地上行走时,可以轻松的完成前进、后退、左右横移、斜向移动、原地旋转等多种行走方式,在遇到台阶等障碍物时,如果不能正常行驶通过的,可通过行星式结构翻越障碍。
25.座椅本体61的顶部设置有脖托62,脖托62与座椅本体61的连接处设置有连接头63,脖托62的背面设置有第一加强板64,第一加强板64的下方设置有第一加强箍65,第一加
强箍65的两端连接在座椅本体61背面的左右侧边,座椅本体61的背面下方设置有第二加强板67,第二加强板67的后侧设置有两组第二加强箍66,两组第二加强箍66的两端连接在座椅本体61的左右侧边,座椅本体61底部的前端设置有前扩撑架611,前扩撑架611的正面底部设置有后托板612,后托板612的底部铰接设置有脚托板613,座椅本体61的左右两侧均设置有扶手底架68,扶手底架68的顶部均设置有侧扶手69,侧扶手69的顶部一侧设置有控制器610。
26.升降机构包括第一电动推杆24、后挡座23、底板22和第二安装板25,底板22设置在轴座13的顶部,底板22底部的左右两侧均转动设置有铰接座21,铰接座21与轴座13相互固定连接,第一电动推杆24和后挡座23均设置在底板22的顶部,后挡座23设置在第一电动推杆24的后侧,第一电动推杆24的侧面设置有陀螺仪传感器26,第二安装板25设置在第一电动推杆24的顶部,座椅本体61设置在第二安装板25的顶部,前扩撑架611的顶部与第二安装板25的底部前端通过螺栓固定连接。
27.每个动力箱3的顶部均设置有顶部安装架31,顶部安装架31与对应的独立悬挂110的一端相互连接,每个动力箱3靠近支撑杆14的一侧设置有与其相互套接的底部安装架32,每个动力箱3的顶部均设置有多个固定杆33,固定杆33上均设置有防护罩36,防护罩36对行星式行走轮34以及麦克纳姆轮35进行保护。
28.前后缓冲装置4包括后插接座41、第一连接杆42、第二连接杆43、第二电动推杆44、和后壳体45,后插接座41插接在后悬臂轴11的后端,第一连接杆42设置在后插接座41的后侧,第二连接杆43设置在后插接座41的顶部后端,第二电动推杆44的后端与后插接座41的底部相互转动连接,第二电动推杆44的输出端与升降机构的后端相互转动连接,后壳体45的套接在第二电动推杆44的表面,且向下对后悬臂轴11进行保护,后壳体45的顶部位于设备收纳箱5的下方,后壳体45的前端与两个纵向杆17相互连接,第一连接杆42的后端与后壳体45的内壁相互连接,设备收纳箱5的下方设置有第三安装板111,第三安装板111的前端连接在位于后侧的两个纵向杆17的顶部,第二连接杆43的顶部向上贯穿后壳体45与第三安装板111相互连接;
29.通过在座椅本体61的下方分别设置有升降机构以及前后缓冲装置4由两个电动推杆通过铰链连接组成连杆机构。通过陀螺仪传感器26实时检测座椅本体61座面相对于地面的倾斜角度,并反馈给第二电动推杆44,第二电动推杆44将根据接收到的信号做出对应的伸缩动作以调整座椅座面,维持水平。在陀螺仪传感器26检测到座椅倾斜时,同步第一电动推杆24会上升至最高状态,避免座椅和乘坐者在座椅自动调节过程中与台阶接触,从而当在爬楼梯或者上升坡面时,能够大大的减缓对人体倾斜造成的不适感,从而使得整个机构的舒适性更强。
30.最后,应当指出,以上实施例仅是本实用新型较有代表性的例子。显然,本实用新型不限于上述实施例,还可以有许多变形。凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均应认为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1