一种消毒机器人用防撞保护机构的制作方法
1.本技术涉及消毒机器人领域,尤其是涉及一种消毒机器人用防撞保护机构。
背景技术:
2.消毒防疫机器人简称消毒机器人,机器人为载体,在机器人内部装置有储液腔对消毒水进行储存,并通过喷头将消毒水喷洒出去,从而对周围环境进行消毒。
3.现有的部分消毒机器人的上端受到撞击后容易导致装置失去平衡,从而容易导致装置倾倒。
技术实现要素:
4.为了改善上述提到的部分消毒机器人的上端受到撞击后容易导致装置失去平衡,从而容易导致装置倾倒的问题,本技术提供一种消毒机器人用防撞保护机构。
5.本技术提供一种消毒机器人用防撞保护机构,采用如下的技术方案:
6.一种消毒机器人用防撞保护机构,包括机器人主体,其特征在于:所述机器人主体的内部开设有储液腔,所述机器人主体的顶面设置有喷头,所述喷头的尾端设置有水泵,所述水泵的进水端固定连接有导水软管,所述导水软管远离所述水泵的一端贯穿所述机器人主体的顶面并延伸至所述储液腔的内部,所述机器人主体的侧面固定连接有弹簧,所述弹簧远离所述机器人主体的一端固定连接有防护板,所述机器人主体远离所述防护板的一侧铰接有支撑板,所述支撑板的侧面固定连接有两个抵触板,所述机器人主体的侧面活动穿插有抵触杆,所述抵触杆的一端与防护板的侧面固定连接,所述抵触杆的另一端与抵触板的侧面贴合。
7.通过上述技术方案,便于通过水泵与导水软管配合将储液腔内的消毒液输送至喷头内,随之通过喷头喷洒出去,当机器人主体与外物碰撞时,通过防护板与弹簧配合对碰撞产生的冲击力进行削减。
8.可选的,上述一种消毒机器人用防撞保护机构中,所述导水软管远离所述水泵的一端固定套接有浮板,所述浮板的顶面固定连接有水位杆,所述水位杆活动插接在所述机器人主体的顶面。
9.通过上述技术方案,便于通过浮板促使水位杆始终在储液腔内消毒液水位线的上侧,从而通过水位杆便于操作员对储液腔内消毒液的余量进行观察。
10.可选的,上述一种消毒机器人用防撞保护机构中,所述水位杆的数量为两个,两个所述水位杆关于所述浮板对称。
11.通过上述技术方案,通过两个水位杆配合便于操作员对储液腔内消毒液的水位高度进行观察。
12.可选的,上述一种消毒机器人用防撞保护机构中,所述水位杆的上端固定连接有挡圈,所述挡圈的直径是所述水位杆直径的两倍。
13.通过上述技术方案,便于通过挡圈对水位杆进行限位,从而减少水位杆完全进入
储液腔内并难以移动出来的可能。
14.可选的,上述一种消毒机器人用防撞保护机构中,所述弹簧的数量为四个,四个所述弹簧呈矩形分布在所述机器人主体的侧面。
15.通过上述技术方案,便于通过四个弹簧与防护板配合对碰撞产生的冲击力进行削减。
16.可选的,上述一种消毒机器人用防撞保护机构中,所述支撑板由一个圆杆与两个竖板组成,两个所述竖板对称设置在所述圆杆的侧面。
17.通过上述技术方案,便于通过支撑板偏转对机器人主体进行支撑,从而减少机器人主体被撞击后倾倒的可能。
18.可选的,上述一种消毒机器人用防撞保护机构中,所述抵触杆的数量为两个,两个所述抵触杆关于所述机器人主体对称。
19.通过上述技术方案,便于通过两个抵触杆与两个抵触板抵触促使支撑板偏转,进而通过支撑板便于对机器人主体进行支撑。
20.综上所述,本技术包括以下至少一种有益效果:1、当机器人主体与外物碰撞时,通过防护板与弹簧配合对碰撞产生的冲击力进行削减,同时通过防护板带动抵触杆移动并促使抵触板带动支撑板偏转,进而通过支撑板对机器人主体进行支撑,从而减少机器人主体倾倒的可能;
21.2、通过浮板促使水位杆始终在储液腔内消毒液水位线的上侧,从而通过水位杆便于操作员对储液腔内消毒液的余量进行观察,进而促使操作员能够及时对储液腔添加消毒液。
附图说明
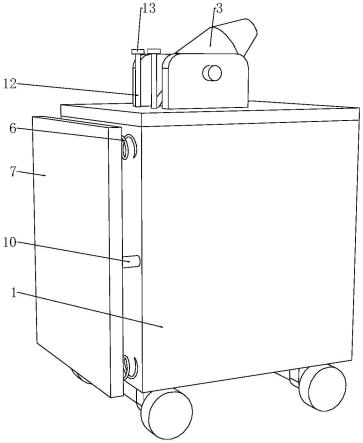
22.图1是本技术立体结构示意图;
23.图2是本技术局部立体结构剖面图;
24.图3是本技术局部立体结构剖面图。
25.图中:1、机器人主体;2、储液腔;3、喷头;4、水泵;5、导水软管;6、弹簧;7、防护板;8、支撑板;9、抵触板;10、抵触杆;11、浮板;12、水位杆;13、挡圈。
具体实施方式
26.以下结合附图1-3对本技术作进一步详细说明。
27.请参看说明书附图中图1、图2和图3,本技术提供的一种实施例:一种消毒机器人用防撞保护机构,包括机器人主体1,机器人主体1的内部开设有储液腔2,通过储液腔2便于对消毒液进行储存,机器人主体1的顶面设置有喷头3,通过喷头3便于将消毒液喷洒出去,喷头3的尾端设置有水泵4,水泵4的进水端固定连接有导水软管5,导水软管5远离水泵4的一端贯穿机器人主体1的顶面并延伸至储液腔2的内部,通过水泵4与导水软管5配合便于将储液腔2内的消毒液输送至喷头3内,进而通过喷头3将消毒液喷洒出去。
28.机器人主体1的侧面固定连接有弹簧6,弹簧6远离机器人主体1的一端固定连接有防护板7,弹簧6的数量为四个,四个弹簧6呈矩形分布在机器人主体1的侧面,通过四个弹簧6与防护板7配合便于对碰撞产生的冲击力进行削减,从而减少机器人主体1受到的冲击力。
29.机器人主体1远离防护板7的一侧铰接有支撑板8,支撑板8的侧面固定连接有两个抵触板9,支撑板8由一个圆杆与两个竖板组成,两个竖板对称设置在圆杆的侧面,通过支撑板8偏转便于对机器人主体1进行支撑,从而减少机器人主体1被撞击后倾倒的可能。
30.机器人主体1的侧面活动穿插有抵触杆10,抵触杆10的一端与防护板7的侧面固定连接,抵触杆10的另一端与抵触板9的侧面贴合,抵触杆10的数量为两个,两个抵触杆10关于机器人主体1对称,通过两个抵触杆10与两个抵触板9抵触促使支撑板8偏转,进而通过支撑板8便于对机器人主体1进行支撑,从而减少机器人主体1倾倒的可能。
31.参看说明书附图中图3,导水软管5远离水泵4的一端固定套接有浮板11,浮板11的顶面固定连接有水位杆12,水位杆12活动插接在机器人主体1的顶面,水位杆12的数量为两个,两个水位杆12关于浮板11对称,通过两个水位杆12配合促使浮板11保持平衡,从而减少浮板11倾斜的可能,并且通过两个水位杆12配合便于对储液腔2内消毒液的水位高度进行观察,进而促使操作员能够及时对储液腔2添加消毒液。
32.参看说明书附图中图3,水位杆12的上端固定连接有挡圈13,挡圈13的直径是水位杆12直径的两倍,通过挡圈13便于对水位杆12进行限位,从而减少水位杆12完全进入储液腔2内并难以移动出来的可能。
33.工作原理:在使用该消毒机器人用防撞保护机构时,通过水泵4与导水软管5配合将储液腔2内的消毒液输送至喷头3内,随之通过喷头3喷洒出去,当机器人主体1与外物碰撞时,通过防护板7与弹簧6配合对碰撞产生的冲击力进行削减,同时通过防护板7带动抵触杆10移动并促使抵触板9带动支撑板8偏转,进而通过支撑板8对机器人主体1进行支撑。
34.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1