一种转节式C型臂医用X射线机的制作方法
一种转节式c型臂医用x射线机
技术领域
1.本实用新型属于医疗器械技术领,具体涉及一种转节式c型臂医用x射线机。
背景技术:
2.现有医用x射线机中,c型臂通常可实现上下的升降运动、沿横导轨的前进后退运动,绕垂直轴线的小角度摆动运动以及沿着c型臂轨道的圆弧形状运动。
3.由于现有的c型臂医用x射线机中,采用旋转中心位于横导轨底部的构造结构,使得在使用该c型臂装置时需要较大的旋转空间。因此,有必要提供一种新的c型臂装置,实现在狭窄手术室及病房中,仍然能对医用床上的患者进行临床检测的需求。
技术实现要素:
4.发明目的:本实用新型所要解决的技术问题是针对现有技术的不足,提供一种转节式c型臂医用x射线机。
5.为了解决上述技术问题,本实用新型公开了一种转节式c型臂医用x射线机,该装置包括机身、横导轨、斜伸臂、c型臂以及转向组件。横导轨的底部与机身活动连接。c 型臂与斜伸臂活动连接。横导轨靠近斜伸臂的一端通过转向组件与斜伸臂连接,从而c 型臂在沿横导轨直线运动的同时,能绕转向组件的竖直轴线作旋转运动。
6.进一步地,所述转向组件包括转向节、上轴承、下轴承、转向轴以及连接板。转向轴包括顶部连接板以及与顶部连接板垂直连接的台阶轴。转向轴远离顶部连接板的一端穿过转向节与连接板可拆卸地连接。转向节通过上轴承和下轴承旋转连接于台阶轴上。连接板与下轴承的底面接触。转向节与横导轨靠近斜伸臂的一端连接。连接板与顶部连接板均与斜伸臂连接。
7.进一步地,所述转向节设有用以穿过转向轴的通孔、转向节的顶部设置有与通孔贯通的上轴承孔,转向节的底部设置有与通孔连通的下轴承孔。上轴承孔与上轴承的外圈过盈配合,下轴承孔与下轴承的外圈过盈配合。
8.进一步地,台阶轴设有上台阶段、与上台阶段连接的过渡段以及与过渡段连接的下台阶段。上台阶段与上轴承内圈过盈配合,过渡段与通孔间隙配合,下台阶段与下轴承内圈过盈配合。
9.进一步地,台阶轴远离顶部连接板的末端设有外螺纹,连接板的中部设有与台阶轴末端外螺纹适配的螺纹孔;连接板与台阶轴远离顶部连接板的末端通过螺纹地方式旋紧连接。
10.进一步地,斜伸臂设有相对设置的顶部连接端盖和底部连接端盖,顶部连接端盖与顶部连接板连接,底部连接端盖与连接板连接。
11.进一步地,顶部连接端盖与顶部连接板通过螺钉可拆卸地连接,底部连接端盖与连接板通过螺钉可拆卸地连接。
12.进一步地,上轴承与下轴承均为圆锥滚子轴承。
13.进一步地,所述横导轨能沿竖直方向升降运动、绕竖直方向旋转运动直线往复运动。
14.进一步地,所述c型臂能沿着斜伸臂的轨道圆弧形状运动。
15.有益效果:
16.(1)本实用新型中,将c型臂通过轨道安装在斜伸臂上,实现沿着斜伸臂的轨道圆弧运动,实现对医用床上的患者的临床检测。
17.(2)本实用新型中,将横导轨通过转向组件与斜伸臂连接,使c型臂在具有传统 c型臂能够沿横导轨直线运动和沿着斜伸臂的轨道圆弧运动的同时,也能够绕转向组件的轴线大角度旋转运动,增加了c型臂的运动自由度,缩短了转节式c型臂装置与医用床之间的间距,在狭窄手术间及病房内,依然可以完成相关检测工作。
18.(3)本实用新型提供的转节式c型臂装置具有结构简单、空间利用率高、灵活性高、使用便利的特点。
附图说明
19.下面结合附图和具体实施方式对本实用新型做更进一步的具体说明,本实用新型的上述和/或其他方面的优点将会变得更加清楚。
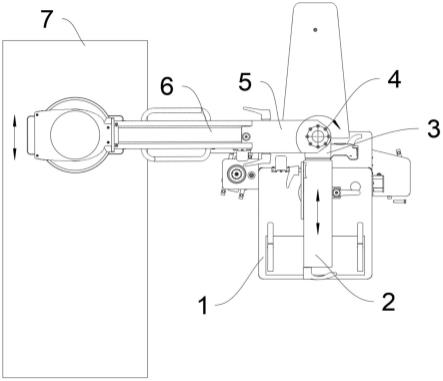
20.图1是本实用新型提供的一种转节式c型臂医用x射线机在常规c型臂检测时的结构示意图。
21.图2是图1所示的本实用新型提供的一种转节式c型臂医用x射线机在常规c型臂检测时的结构俯视图。
22.图3是本实用新型提供的一种转节式c型臂医用x射线机在c型臂旋转90后的结构示意图。
23.图4是图3所示的本实用新型提供的一种转节式c型臂医用x射线机在c型臂旋转90后的结构俯视图。
24.图5是本实用新型提供的一种转节式c型臂医用x射线机的转向组件的结构剖面图。
25.图6是本实用新型提供的一种转节式c型臂医用x射线机的转向轴的结构剖面图。
具体实施方式
26.本实用新型的附图标记如下所示:机身1,横导轨2,转向节3,通孔31,上轴承孔32,下轴承孔33,螺钉4,斜伸臂5,顶部连接端盖51,底部连接端盖52,c型臂 6,医用床7,上轴承8,转向轴9,顶部连接板91,台阶轴92,上台阶段921,过渡段922,下台阶段923,连接板10,下轴承11。
27.如图1和图4所示,本实用新型提供了一种转节式c型臂医用x射线机,该转节式c型臂装置包括机身1、横导轨2、斜伸臂5、c型臂6以及转向组件。机身1位于地面上方。横导轨2的底部与机身1活动连接,横导轨2能沿竖直方向升降运动、绕竖直方向旋转运动以及直线往复运动。c型臂6与斜伸臂5连接且能沿着斜伸臂5的轨道圆弧形状运动。转向组件设有竖直方向的轴线,横导轨2靠近斜伸臂5的一端通过转向组件与斜伸臂5相连接,从而c型臂6在沿横导轨2直线运动的同时,能绕转向组件的轴线旋转运动。
28.本实施例中,转向组件的轴线为竖直方向。
29.本实用新型在传统c型臂x光机的基础上,将横导轨2通过转向组件与斜伸臂5 连接,使c型臂能够绕转向组件的轴线大角度旋转运动,增加了c型臂的运动自由度。常规c型臂检测时,该转节式c型臂装置中各部件与医用床7的位置关系如图1和图 2所示。而在增加转向组件后,通过c型臂6绕转向组件的轴线旋转90度后,该转节式c型臂装置中各部件与医用床的位置关系如图3和图4所示。从图可知,通过转向有效缩短了机身1远端与医用床7之间的间距,在狭窄手术间及病房内,依然可以完成相关检测工作。
30.当c型臂所在平面与横导轨方向一致时,与传统c型臂一样,能够沿横导轨2方向直线运动和沿着斜伸臂5的轨道圆弧运动;当c型臂绕转向组件的轴线旋转一定角度后,在横导轨的带动下,c型臂可以沿横导轨方向平移,从而增加了c型臂运动自由度。
31.本实施例中,如图5所示,转向组件包括转向节3、上轴承8、下轴承11、转向轴 9以及连接板10。转向轴9包括顶部连接板91以及与顶部连接板91垂直连接为一体的台阶轴92。转向节3通过上轴承8和下轴承11旋转连接于呈竖直方向设置的台阶轴 92上。连接板10与转向轴9远离顶部连接板91的一端通过螺纹旋紧的方式连接。连接板10与下轴承11的底面接触,用于实现对轴承11的轴向定位,保证运行平稳可靠。
32.转向节3设有用以穿过转向轴9的通孔31;转向节3的顶部设置有与通孔31贯通的上轴承孔32,转向节3的底部设置有与通孔31连通的下轴承孔33。上轴承孔32与上轴承8的外圈过盈配合,下轴承孔33与下轴承11的外圈过盈配合。
33.本实施例中,如图5所示,上轴承8与下轴承11均为圆锥滚子轴承。本实用新型采用圆锥滚子轴承,配对的圆锥滚子轴承可以同时承受较大的轴向载荷和径向载荷,而且游隙小,满足本实用新型的运动性能要求。
34.本实施例中,如图6所示,台阶轴92设有上台阶段921、与上台阶段921连接的过渡段922以及与过渡段922连接的下台阶段923,上台阶段921与上轴承8内圈过盈配合,过渡段922与通孔31间隙配合,下台阶段923与下轴承11内圈过盈配合。
35.本实施例中,台阶轴92远离顶部连接板91的末端设有外螺纹,连接板10的中部设有与转向轴9末端外螺纹适配的螺纹孔。连接板10与台阶轴92远离顶部连接板91 的末端通过螺纹地方式旋紧连接。
36.本实施例中,转向节3与横导轨2靠近斜伸臂5的一端可通过螺钉固定连接。
37.本实施例中,如图1所示,斜伸臂5设有相对水平设置的顶部连接端盖51和底部连接端盖52,顶部连接端盖51与顶部连接板91以及底部连接端盖52与连接板10之间均通过螺钉4固定连接。
38.本实施例中,将c型臂6通过轨道安装在斜伸臂5上,实现沿着斜伸臂5的轨道圆弧运动,实现对医用床7上的患者的临床检测。
39.本实施例中,将横导轨2通过转向组件与斜伸臂5连接,从而c型臂6既能够沿横导轨2直线运动,也能够绕转向组件的轴线大角度旋转运动,增加了c型臂的运动自由度,实现了在狭窄手术室及病房中,仍然能对医用床7上的患者进行临床检测的需求。
40.参照附图,安装时,先在机身1上方安装横导轨2,再安装转向节3,在转向节3 上下相对的两端面装配上轴承8和下轴承11,再安装转向轴9,将连接板10与转向轴 9旋紧连接,最后通过螺钉4将斜伸臂5和横导轨2分别与转向组件连接。通过c型臂6绕转向组件的轴线
大角度摆转,实现了在狭窄手术室及病房中,仍然能对医用床7 上的患者进行临床检测的需求。
41.本实用新型提供了一种转节式c型臂医用x射线机的思路及方法,具体实现该技术方案的方法和途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1