角度可调节踝泵训练器的制作方法
1.本实用新型涉及医疗器械,具体涉及一种角度可调节踝泵训练器。
背景技术:
2.踝泵运动是指通过下肢肌肉收缩带动踝关节运动,从而使下肢肌肉起到像泵一样的作用,促进下肢血液和淋巴循环,进而促进下肢肿胀消退、预防下肢血栓形成,一般卧床患者或术后为了预防病人深静脉血栓,需要患者进行踝泵运动,来促进病人下肢血液循环及淋巴回流,但是,对于不同的情况患者需要做足跖曲和足背曲的角度和踝泵运动次数也不同,因此对不同人员需要设置不同的角度,和计量踝泵运动的次数,同时因为有些患者不具备主动锻炼的能力或能力较弱,因此需要辅助患者做踝泵运动。
技术实现要素:
3.本实用新型所要解决的技术问题是,患者不具备主动锻炼的能力或能力较弱和对于不同的情况患者需要做足跖曲和足背曲的角度以及计量踝泵运动的次数的问题。
4.针对上述技术问题,提出一种角度可调节踝泵训练器;通过以下技术方案实现的:一种角度可调节踝泵训练器,包括脚踏其特征在于:动力传动装置、角度调节装置和计数装置设置在基座上,脚踏与设置在基座上的安装卡铰接,动力传动装置和角度调节装置基座上,并且分别设置在脚踏的两侧,计数装置垂直设置在基座上,呈左右两侧分布。
5.本实用新型技术方案中,利用绑带把患者的腿和脚固定在脚踏上,同时利用动力传动装置带动患者的脚做踝泵运动,角度调节装置上的限位器可控制踝泵运动中足跖曲和足背曲的角度,计数装置可实时计量和显示患者踝泵运动的次数,避免出现漏数或多数的情况。
6.对本实用新型技术方案的优选,在脚踏的四周垂直脚踏设置有一段凸起的围挡,脚踏的一端沿脚踏侧面设置有贯穿脚踏的传动杆,传动杆的两端凸出脚踏的两侧,传动杆把脚踏铰接在安装卡内,在传动杆的一端设置有传动齿轮,同时在脚踏一侧的外壁上垂直外壁设置有一个限位板和两根脚部绑带,脚部绑带一端固定在脚踏一侧的外壁上,脚部绑带非固定一端的外侧面上分别设置有魔术贴的子面和母面,安装扣环设置在脚踏另一侧的外壁上,围挡的设置可有效防止患者脚部固定不稳产生的滑动,同时安装扣环也利于脚部绑带的固定。
7.对本实用新型技术方案的优选,动力传动装置包括驱动电机和传动蜗杆,驱动电机设置在基座上,传动蜗杆一端与驱动电机连接,一端设置在安装座上,传动蜗杆与传动杆上固定的传动齿轮接触配合传动,传动蜗杆和传动齿轮的配合使用能有效防止打滑,使运动更稳定,便于患者锻炼。
8.对本实用新型技术方案的优选,安装座垂直设置在基座上,在安装座上开设有一个圆形通口,圆形通孔内可插入传动蜗杆的一端,这样的设置使得传动蜗杆与基座不接触,保证了传动蜗杆的正常运行。
9.对本实用新型技术方案的优选,角度调节装置为半圆形,圆心处与传动杆轴向对应,角度调节装置包括角度盘、调节棒和限位器,在角度盘上沿圆弧面设置有刻度,垂直于角度盘沿圆弧面开设有弧形通槽,调节棒有两根,调节棒设置在弧形通槽内,调节棒可沿弧形通槽滑动,在调节棒与弧形通槽滑动接触处设置有一段矩形条,使得调节棒上的矩形处与弧形通槽滑动接触,同时在调节棒与弧形通槽滑动接触的一端设置有锁紧螺母,限位器设置在调节棒的另外一端,调节棒位置可调的设置使得在调节角度后,脚踏在运行时,脚踏侧面的限位板会触碰到调节棒一端的限位器,进而使电机停止转动,并且反向运动,保证的装置的稳定运行。
10.对本实用新型技术方案的优选,角度盘上设置的刻度为均匀设置,从中部向两端依次递增,角度范围分别是0
°‑
90
°
,这样的设置使得在脚踏沿铰接处运动时,可任意调节运动两个方向的角度,达到了调节足跖曲和足背曲的角度的效果。
11.对本实用新型技术方案的优选,计数装置包括光电感应器和显示屏,光电感应器设置在基座上,左右分布设置在脚踏的两端,显示屏垂直设置在基座上,这样的设置使得,脚踏每经过一次光电感应器就代表患者做了一次踝泵运动,使计数更准确。
12.对本实用新型技术方案的优选,在基座上设置有腿垫,并且腿垫与脚踏在同一中轴线上,在腿垫的一侧壁上设置有腿部绑带,同时在腿垫的另外一侧壁上设置有安装扣环,在腿部绑带非固定一端的外侧面上分别设置有魔术贴的子面和母面,这样的设计便于患者腿部的固定,使踝泵运动效果更好。
13.对本实用新型技术方案的优选,在脚踏和动力传动装置的外端罩有防护罩,防护罩的设置使得患者身上的衣物或其他物品不会被夹在动力传动装置中,使用更安全。
14.本实用新型与现有技术相比具有的有益效果是:
15.本实用新型的技术方案,利用绑带把患者的腿和脚固定在脚踏上,同时利用动力传动装置带动患者的脚做踝泵运动,角度调节装置上的限位器可控制踝泵运动中足跖曲和足背曲的角度,计数装置可实时计量和显示患者踝泵运动的次数,避免出现漏数或多数的情况。
附图说明
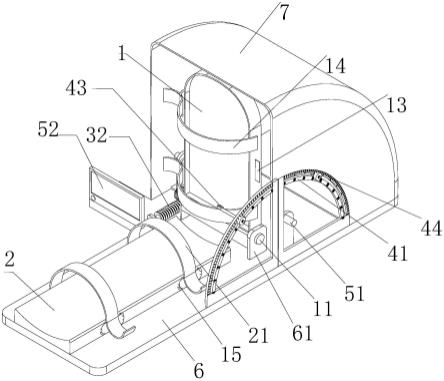
16.图1为本实施例角度可调节踝泵训练器的立体示意图。
17.图2为本实施例角度可调节踝泵训练器的正视图。
18.图3为本实施例角度可调节踝泵训练器的侧视图。
19.图4为动力传动装置的立体示意图。
20.图5为本实施例角度可调节踝泵训练器的立体爆炸图。
21.图6为实施例2的立体示意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图1-6,对本实用新型实施例中的技术方案进行详细的描述。
23.实施例1
24.如图1所示,一种角度可调节踝泵训练器,包括脚踏1、动力传动装置3、角度调节装
置4、计数装置5和基座6。
25.如图1和4所示,安装卡61焊接在基座6上,在安装卡61上垂直于安装卡61设置有贯通的圆孔,脚踏1的一端设置有贯穿脚踏1的传动杆11,在传动杆11的一端设置有传动齿轮12,传动杆11贯穿脚踏1,并且传动杆11与脚踏1之间添加有防滑键结构,两者不产生径向滑动,传动杆11把脚踏1铰接在安装卡61内,脚踏可沿铰接处旋转。
26.如图1和2所示,在脚踏1的一侧的外壁上垂直外壁设置有一个限位板13和两根脚部绑带14,脚部绑带14可直接用螺钉固定在在脚踏1的外壁上,安装扣环15也可用螺钉固定在在脚踏1另一侧的外壁上,同时在脚部绑带14非固定一端的外侧面上分别设置有魔术贴的子面和母面,这样在使用时把患者脚部放置在脚踏1上,把脚部绑带14非固定一端穿过安装扣环15,再把脚部绑带14上的魔术贴子面和母面贴合到一起即可完成患者脚部的固定。
27.如图1和4所示,驱动电机31和传动蜗杆32设置在基座6上传动杆11安装传动齿轮12的一侧,驱动电机31通过螺栓水平固定在基座6上,传动蜗杆32一端通过联轴器图中未画出与驱动电机31固定在一起,传动蜗杆32的另一端插在焊接在基座6上的安装座33中,在安装座33上开设有一个圆形通口,圆形通孔内可插入传动蜗杆32,传动蜗杆32与传动杆11上的传动齿轮12配合。
28.本实施例的驱动过程:在使用时驱动电机31带动传动蜗杆32旋转,同时传动蜗杆32带动传动齿轮12转动,进而带动传动杆11和脚踏1旋转,完成脚部的运动,因驱动电机31可双向旋转因此可带动患者脚部进行踝泵运动。
29.如图1和3所示,角度调节装置4为半圆形设置,角度调节装置4圆心处与传动杆11轴向对应,角度调节装置4包括角度盘41、调节棒42和限位器43,在角度盘41上开设有弧形通槽,弧形通槽垂直于角度盘41沿圆弧面开设,在弧形通槽内放置调节棒42,调节棒42有两根,分别设置在两侧的弧形通槽内,在弧形通槽内的调节棒42为矩形设置,这样可防止调节棒42在矩形槽内转动,并且在调节棒42的一端沿轴向设置有螺纹,并通过锁紧螺母45来固定调节棒42的位置,同时在调节棒42的另外一端固定有限位器43,限位器43可与旋转的脚踏1上的限位板13接触。
30.如图1和3所示,在角度盘41上沿圆弧面设置有刻度44,刻度44为均匀设置,从中部向两端依次递增,角度范围分别是0
°‑
90
°
。
31.本实施例的角度调节过程:在角度调整时,首先拧松调节棒42上的锁紧螺母45,然后移动调节棒42到合适角度,然后拧紧锁紧螺母45,驱动电机31驱动脚踏1转动过程中,脚踏1上的限位板13会碰到固定在调节棒42上的限位器43,在限位器43的电信号反馈下驱动电机31反向转动,再至后面的限位器43,驱动电机31再反向转动,即完成一个周期的踝泵运动。
32.如图1和5所示,在脚踏1的两侧装有光电感应器51,光电感应器51通过螺丝固定在基座6上,光电感应器51可为对射型感应器,并且配有显示屏52,显示屏52固定在基座6上,脚踏1转动时,会经过光电感应器51,每经过一次光电感应器51所对应的显示屏52上数值就会增加一,进而完成计数,光电感应器51和显示屏52为现有物品,可直接使用。
33.如图1和5所示,为了防止患者身上的衣物或其他物品被夹在动力传动装置中,在脚踏1和动力传动装置3的外端罩有防护罩7。
34.实施例2
35.如图6所示,基于实施例1,在基座6上通过螺钉固定有腿垫2,腿垫2与脚踏1在同一中轴线上,为了增强患者的舒适性在腿垫2上用胶固定有海绵,同时为了固定患者腿部,在腿垫2的一侧壁上缝合有两根腿部绑带21,同时在腿垫2的另外一侧壁上对应处固定两个安装扣环15,使用时可把腿部绑带21插入安装扣环15中,对患者腿部进行束缚,同时为了固定腿部,在腿部绑带21非固定一端的外侧面上分别设置有魔术贴的子面和母面,使用时插入安装扣环15的腿部绑带21可以再通过魔术贴完成粘贴固定。
36.以上实施例仅为说明本实用新型的技术思想,不能以此限定本实用新型的保护范围,凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落入本实用新型保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1