一种基于3d摇杆的万向转向机构的制作方法
1.本实用新型涉及方向检测技术领域。一种基于3d摇杆的万向转向机构。
背景技术:
2.在微创手术操作过程中,外科医生在患者体表切开2~4个5~10mm的小切口,把所需手术器械通过患者体表的微小切口插入到腹腔内部,对病灶组织器官进行切割、夹持等手术操作,该操作方式使得手术器械只能在以切口为顶点的狭小倒锥子形工作空间内运动。
3.现有技术如cn114469201a中的图14示出了一种通过手腕运动及四股丝线配合绕线盘运动操控多自由度度柔性器械的蛇形关节相对轴管上下左右偏摆的技术方案。该方案的偏摆控制机构与手柄不可拆卸,该装置在手术使用后,只能整体遗弃,不能回收循环利用,而要解决手术器械循环利用的问题,需将介入人体的手术器械和操纵单元分离,因此在本实用新型的微创手术器械上需要操作单元能独立监测操作者对手柄施加的控制动作,并转换为电信号,来控制驱动手术器械的电机。
技术实现要素:
4.本实用新型的目的在于针对上述不足,提出了一种基于3d摇杆的万向转向机构,能监测手柄相对驱动部万向转动时的。
5.本实用新型采用以下技术方案,一种基于3d摇杆的万向转向机构,3d摇杆元器件安装在万向转向机构中,所述万向转向机构包括可拆卸的外球壳和内球壳,内球壳嵌于外球壳内形成球形铰结构,内球壳在外球壳内可自由转动,内球壳和外球壳均为一端敞口另一端封闭的结构,内球壳的封闭端正对外球壳的敞口端,并与驱动部的近端可拆卸的连接,内球壳的敞口朝向外球壳的封闭端,外球壳内固定有正对内球壳敞口的套筒,所述3d摇杆元器件的信号发生模块固定在内球壳的腔体中,使所述摇杆背离信号发生模块的一端从所述内球壳的敞口中心伸出后插入所述外球壳的套筒内。
6.所述外球壳包括外下半球和外上半球,所述外下半球和外上半球相向的一端在外周设置有相对的耳板,并通过螺栓一连接固定。
7.所述内球壳包括内上半球和内下半球,所述内上半球和内下半球相向的一端靠近球壳边沿设置有对应的内螺纹孔,并通过螺栓二连接固定。
8.所述外球壳的封闭端朝向手柄并固定在手柄上,所述连接杆背向内球壳的一端与驱动部连接,所述万向转向机构用于衔接驱动部和手柄。
9.所述手柄在面向驱动部处设有凹腔,所述外球壳的封口端通过连接件固定在凹腔内。
10.所述外球壳的敞口边缘通过至少三根环绕驱动部的轴线均匀布置的弹簧与驱动部的近端相连。
11.所述信号发生模块内安装有两个可变电阻器,一个可变电阻器用于将驱动部相对
于万向转向机构中心绕垂直于套筒的第一轴转动的角度转变为电信号,另一个可变电阻器用于将驱动部相对于万向转向机构中心绕垂直于套筒的第二轴转动的角度转变为电信号,第一轴和第二轴正交,且第一轴与手柄的延伸方向垂直。
12.如手柄竖直延伸时,第一轴就是水平轴,这样手柄相对驱动的转动等同于相对水平轴和竖直轴转动后在可变电阻器上监测获得的电信号,获得的电信号更加对应于手腕的运动方式。本实用新型的有益效果是:本实用新型的万向转向机构设置在手柄内,通过在万向转向机构设有3d摇杆元器件,将手柄的动作经3d摇杆元器件的电信号发生模块传递到处理器,转动前的电信号和转动后的电信号的差值与手柄的转动方向相关,若差值为负时,代表手柄绕水平轴或竖直轴逆时针转动,该差值的绝对值与逆时针转动的角度正相关,若差值为负时,代表手柄绕水平轴或竖直轴顺时针转动,该差值的绝对值与顺时针转动的角度正相关,处理器根据从可变电阻器采集的前后两次电信号来精准控制电机转动,从而实现借助监测手腕的动作来获得电信号,以便控制驱动手术器械的电机。
13.同时当手柄操作完毕时,借助外球壳轴向均匀布设的弹簧使得万向转向机构可以复位,提高了操作的简便性。
附图说明
14.图1为电动式多自由度度柔性医疗器械的整体结构图;
15.图2为电动式多自由度度柔性医疗器械的电机仓、万向转向机构、手柄、操作柄的半剖结构示意图;
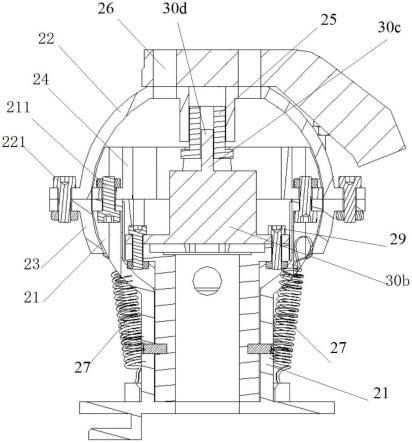
16.图3为本实用新型万向转向机构的半剖结构示意图;
17.其中,i-手柄、i-1-凹腔、ii-驱动部、v-操作柄、vi-蛇形关节、vii-前端执行装置、viii-万向转向机构、21-内上半球、22-外上半球、23-外下半球、24-内下半球、25-套筒、26-连接件、27-弹簧一、29-固定件、30-3d摇杆元器件、30a-摇杆、30b-信号发生模块、30c-第一端、30d-第二端、33-副电路板、34、38-电机、39-电路主板、221-螺栓一、211-螺栓二。
具体实施方式
18.下面结合附图来具体介绍本实用新型装置。
19.本实用新型装置可运用于如图1所示的医疗器械中的前端执行部iii,该医疗器械主要包括手柄i、驱动部ii、前端执行部iii、蛇形关节vi、前端执行装置vii,其中,在驱动部ii和手柄i之间通过万向转向机构viii衔接安装。
20.如图1至图2所示,本实用新型提出的适用于电动多自由度柔性医疗器械的万向转向机构位于手柄i内,用于衔接驱动部ii和手柄i。如图2所示,驱动部ii可拆卸的与万向转向机构viii机构连接,驱动部ii和万向转向机构viii相互连接的一端设有相互插接的信号输入及输出端子,信号输入端子与电路主板39、副电路板33信号连接。驱动部ii内两个电机34、38均通过电路主板39和信号输入/输出端子与3d摇杆元器件30信号连接。电机34、38在驱动前端执行部iii内部的传动轴转动,依次带动相应的部件机构传动,从而使在前端的蛇形关节vi、前端执行装置vii发生相应的动作。
21.现有技术cn107104016b和cn205621645u公布了两种3d摇杆元器件30,3d摇杆元器件30的壳体内设有两个可变电阻器,摇杆在壳体内连接相互正交的上摇臂和下摇臂,上摇
臂和下摇臂的转动动作分别使两个可变电阻器产生相应的信号,从输出端子输出。
22.如图2和图3所示,本实用新型万向转向机构的3d摇杆元器件30具有摇杆30a和信号发生模块30b,摇杆30a的第一端30c贯穿信号发生模块30b内的上摇臂和下摇臂,摇杆30a的转动使得上摇臂和下摇臂的转动,从而上摇臂和下摇臂的转动动作使信号发生模块30b内的两个可变电阻器产生相应幅度的信号,从输出端子输出。一个可变电阻器用于将驱动部相对于万向转向机构中心绕垂直于套筒的第一轴转动的角度转变为电信号,另一个可变电阻器用于将驱动部相对于万向转向机构中心绕垂直于套筒的第二轴转动的角度转变为电信号,第一轴和第二轴正交,且第一轴与手柄的延伸方向垂直。手柄竖直延伸时,第一轴就是水平轴,这样手柄相对驱动的转动等同于相对水平轴和竖直轴转动后在可变电阻器上监测获得的电信号,获得的电信号更加对应于手腕的运动方式。
23.3d摇杆元器件30安装在万向转向机构viii中,如图2和图3所示,万向转向机构viii具体包括:外下半球23和外上半球22组成的外球壳,以及内上半球21和内下半球24组成的内球壳,外球壳和内球壳均具有敞口,外下半球23和外上半球22的相对侧在外周设置相对的耳板以及螺栓一221连接固定,内上半球21和内下半球24的相对侧在靠近球壳边沿设置对应的内螺纹孔以及螺栓二211连接固定。内球壳的封闭端与驱动部ii的近端连接或形成一体,3d摇杆元器件30的信号发生模块30b通过固定件29固定在内球壳的腔体中,而摇杆30a从内球壳背离封闭端的敞口处伸出。外球壳的封闭端朝向手柄i,手柄i在面向驱动部ii处设有凹腔i-1,外球壳的封口端通过连接件26固定在凹腔i-1内,外球壳的敞口朝向驱动部ii的近端。外球壳内固定有正对内球壳敞口的套筒25,该摇杆30a的第二端30d插入于外球壳内的套筒25中。内球壳的封闭端与伸入外球壳的敞口端的连接杆连接,该连接杆背向内球壳的一端与驱动部ii的近端连为一体,内球壳嵌于外球壳内形成球形铰结构,内球壳在外球壳内可自由转动。外球壳的敞口边缘还通过至少三根弹簧一27与驱动部ii的近端相连,三根弹簧一27环绕驱动部ii的轴线均匀布置。
24.将外球壳和内球壳各分为上下两部分的方式,有利于将内球壳组装到外球壳内,安装时先将外上半球22固定在手柄i上,然后将3d摇杆元器件30和内上半球21、内下半球24、连接杆组装成内球壳,放入外上半球22中,是摇杆插入套筒,再安装外下半球,最后连接驱动部,安装弹簧。
25.使用操作时,当手柄i带动外球壳一起转动时,摇杆30a的第一端30c在信号发生模块30b同步转动,使得信号发生模块30b内的两个可变电阻器产生相应幅度的信号,从输出端子输出并传递给驱动部ii内的主板39、副电路板33,在将信号作用于驱动部ii内的两个电机34、38。当操作者停止向手柄i施加偏置力后,手柄i和驱动部ii能实现自主复位。
26.通过在万向转向机构设有3d摇杆元器件,将手柄的动作经3d摇杆元器件的电信号发生模块传递到处理器,转动前的电信号和转动后的电信号的差值与手柄的转动方向相关,若差值为正时,代表手柄绕水平轴或竖直轴逆时针转动,该差值的绝对值与逆时针转动的角度正相关,若差值为负时,代表手柄绕水平轴或竖直轴顺时针转动,该差值的绝对值与顺时针转动的角度正相关,处理器根据从可变电阻器采集的前后两次电信号来精准控制电机转动,从而实现借助监测手腕的动作来获得电信号,以便控制驱动手术器械的电机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1