一种穿刺设备末端及穿刺系统的制作方法
1.本说明书涉及医疗器械技术领域,尤其涉及一种穿刺设备末端及穿刺系统。
背景技术:
2.不可逆电穿孔术式作为治疗肿瘤的一种手段,是通过将两根以上的带有电极的穿刺针按一定规律放置在肿瘤周围,通过电场杀死肿瘤细胞的方式。对比于手术治疗、放射治疗和化学药物治疗等传统疗法,具有对患者的生理及心理创伤小、毒副作用小、无并发症、无后遗症等优点。同时,与射频、微波、冷冻、超声聚焦等基于热消融原理的物理疗法不同,不可逆电穿孔术式是对肿瘤细胞的破坏是基于非热生物医学效应,能够避免血管、淋巴等循环系统的“热沉效应”,并能够消融热敏器官附近的肿瘤组织,打破了热疗法(例如,射频消融、微波消融、冷冻消融等)治疗肿瘤的局限性。
3.在该术式手术过程中,至少需要两根电极针布置在肿瘤附近形成电场从而杀死肿瘤。并且,该术式手术对于布针的要求极为严苛。由于严苛的布针要求,使得该术式的人工操作难度极大,即使该术式已有相应的临床疗效证明,也依然难以大规模推广,并且临床疗效的稳定性也难以保证。
4.因此,有必要提供一种穿刺设备末端、穿刺系统及控制方法,以满足该术式的自动化布针需求。
技术实现要素:
5.本说明书实施例的第一方面提供了一种穿刺设备末端,所述穿刺设备末端包括:末端本体;以及多个穿刺针安装组件,沿所述末端本体的周向设置;其中,所述多个穿刺针安装组件中的至少一个包括:设置在所述末端本体第一端的第一安装件,以及设置在所述末端本体第二端的第二安装件;其中,所述第一安装件能够相对所述末端本体沿第一方向移动,所述第二安装件能够相对所述末端本体固定设置,所述第一方向由所述第一安装件和所述第二安装件确定。
6.在一些实施例中,所述多个穿刺针安装组件中的至少一个还包括:穿刺针安装槽,用于放置穿刺针组件;所述第一安装件设置在所述穿刺针安装槽的第一端,所述第二安装件设置在所述穿刺针安装槽的第二端。
7.在一些实施例中,所述第二安装件上设置穿刺针导向结构,和/或所述末端本体上设置第一安装件导向结构。
8.在一些实施例中,当所述第二安装件上设置穿刺针导向结构时,所述穿刺针导向结构上开设导向孔,所述导向孔的轴线方向与所述第一方向平行。
9.在一些实施例中,所述第一安装件和/或所述第二安装件上设置第一可伸缩结构,所述第一可伸缩结构用于调节第一安装件和/或所述第二安装件到穿刺针组件之间的距离。
10.在一些实施例中,还包括通过第一安装件和第二安装件安装在穿刺针安装组件上
的穿刺针组件,所述穿刺针组件包括内针和外针,所述外针套设在所述内针外,所述外针与所述内针通过连接结构可选择地连接或分离。
11.在一些实施例中,所述内针包括内针针体和内针针帽,所述外针包括外针针体和外针针帽;所述连接结构包括设置在所述内针针帽和所述外针针帽的其中一个上的第二可伸缩结构,以及设置在所述内针针帽和所述外针针帽的另一个上的凹陷,所述第二可伸缩结构能够与所述凹陷配合或分离。
12.在一些实施例中,所述外针的材料是电绝缘材料。
13.在一些实施例中,所述第一安装件的位置在内针的放电过程中不锁死,以使所述内针可以随所述穿刺对象的动作而移动。
14.在一些实施例中,所述末端本体的两端中至少一个设有连接接口,所述连接接口用于实现所述末端本体与机械臂之间的机械连接和电气连接。
15.本说明书实施例的第二方面提供了一种穿刺系统,包括前述任一实施例所述的穿刺设备末端,以及机械臂。
16.本说明书实施例可以实现的有益效果包括而不限于:可以实现多个穿刺针组件的自动化布针。
附图说明
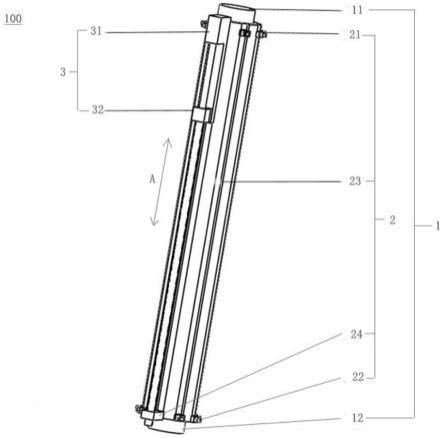
17.图1是本说明书一些实施例的穿刺设备末端100的示例性结构图。
18.图2a、图2b是本说明书一些实施例中的穿刺针导向结构24的示例性结构图。
19.图3是本说明书一些实施例的第一可伸缩结构25的示例性结构图。
20.图4是本说明书一些实施例的穿刺针组件3的示例性结构图。
21.图5a是本说明书一些实施例的内针31的示例性结构图。
22.图5b是本说明书一些实施例的外针32的示例性结构图。
23.图6a是本说明书一些实施例的电磁弹性组件600a的结构示意图。
24.图6b是本说明书一些实施例的丝杠传动组件600b的结构示意图。
25.图7是本说明书一些实施例的穿刺系统700的示例性结构图。
26.图8是本说明书一些实施例的穿刺系统700的应用场景800的示例性框图。
27.图9是本说明书一些实施例的控制方法900的示例性流程图。
28.图10是本说明书一些实施例的控制方法900中的步骤930的示例性流程1000。
29.图11是本说明书一些实施例的控制方法900中第一位置1106和第二位置1107的关系示意图。
30.附图标记说明:
31.1为末端本体;2为穿刺针安装组件;3为穿刺针组件;4为机械臂;11为末端本体第一端;12为末端本体第二端;21为第一安装件;22为第二安装件;23为穿刺针安装槽;24为穿刺针导向结构;25为第一可伸缩结构;31为内针;32为外针;241为导向孔;a为第一方向;311为内针针体;312为内针针帽;321为外针针体;322为外针针帽;3121为第二可伸缩结构;3221为凹陷;610为第一壳体;611为容纳段;612为导向段;620为电磁铁;630为复位弹簧;640为连接段;650为驱动组件;660为第二壳体;670为丝杠;680为丝杠螺母:690为伸缩块;651为电机;652为传动带;653为传动轮;1101为第一穿刺针组件;1102为第二穿刺针组件;
1103为肿瘤;1104为第一平面;1105为第二平面;1106为第一位置;1107为第二位置。
具体实施方式
32.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行描述和说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。基于本说明书提供的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。此外,还可以理解的是,虽然这种开发过程中所作出的努力可能是复杂并且冗长的,然而对于与本说明书公开的内容相关的本领域的普通技术人员而言,在本说明书揭露的技术内容的基础上进行的一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本说明书公开的内容不充分。
33.在本说明书中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本说明书的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域普通技术人员显式地和隐式地理解的是,本说明书所描述的实施例在不冲突的情况下,可以与其它实施例相结合。
34.除非另作定义,本说明书所涉及的技术术语或者科学术语应当为本说明书所属技术领域内具有一般技能的人士所理解的通常意义。本说明书所涉及的“一”、“一个”、“一种”、“该”等类似词语并不表示数量限制,可表示单数或复数。本说明书所涉及的术语“包括”、“包含”、“具有”以及它们任何变形,意图在于覆盖不排他的包含;例如包含了一系列步骤或模块(单元)的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可以还包括没有列出的步骤或单元,或可以还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。本说明书所涉及的“连接”、“相连”、“耦接”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电气的连接,不管是直接的还是间接的。本说明书所涉及的“多个”是指大于或者等于两个。“和/或”描述关联对象的关联关系,表示可以存在三种关系,例如,“a和/或b”可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。本说明书所涉及的术语“第一”、“第二”、“第三”等仅仅是区别类似的对象,不代表针对对象的特定排序。
35.在不可逆电穿孔术式手术过程中,要求所有电极针必须平行或近乎平行(例如两电极针之间的夹角在0
°±5°
范围内),两电极针的针尖连线与电极针的针体垂直或近乎垂直(例如,两电极针的针尖连线与电极针的针体之间的夹角在0
°±5°
范围内),以及电极针之间的距离也有严格的距离限制,因此,布针要求非常严苛。
36.若是采用手动操作,在布针过程中将会需要一直依赖扫描仪获取的关于待手术对象(例如肿瘤)的图像进行反复确认,并且对操作人员的经验要求极高。因此,进行手动布针,不仅效率很低,且对人员依赖性强,不利于推广。
37.基于该布针需求,本说明书实施例提供一种穿刺设备末端、穿刺系统及其控制方法,以实现自动布设多针。
38.图1是本说明书一些实施例的穿刺设备末端100的示例性结构图。
39.如图1所示,在一些实施例中,穿刺设备末端100可以包括末端本体1以及多个穿刺
针安装组件2。
40.末端本体1用于安装多个穿刺针安装组件2,以及用于与机械臂4连接。关于机械臂的结构,可以参考后面关于图7、图8的说明内容。在一些实施例中,末端本体1可以为圆柱状、圆筒状、或其他可以安装多个穿刺针安装组件2的形状,均可以包含在本说明书实施例的技术构思范围内。在一些实施例中,末端本体1通过两端与机械臂进行连接。在另一些实施例中,末端本体1可以通过两端中的其中一端与机械臂进行连接。
41.穿刺针安装组件2用于安装穿刺针组件3。关于穿刺针组件3的结构,可以参考后面关于图4、图5以及图6a、图6b的说明内容。
42.在一些实施例中,多个穿刺针安装组件2的至少一个可以包括第一安装件21和第二安装件22。
43.第一安装件21用于安装穿刺针组件3并带动穿刺针组件3移动。在一些实施例中,第一安装件21可以设置在末端本体第一端11。在一些实施例中,第一安装件21能够相对末端本体1沿第一方向a移动。第一方向a指的是与末端本体1的纵向轴线平行的方向。在一些实施例中,第一安装件21可以在移动过程中带动穿刺针组件3移动。在一些实施例中,第一安装件21可以通过末端本体1上的带轮传动机构实现相对末端本体1沿第一方向a移动。在一些实施例中,带轮传动机构可以包括电机、主动轮、从动轮以及传动带,主动轮和从动轮分别设置在末端本体1的两端,传动带与主动轮、从动轮相连,第一安装件21与传动带固定连接,电机驱动主动轮转动时,传动带带动第一安装件21相对末端本体1沿第一方向a移动。在一些实施例中,各个第一安装件21之间固定连接,从而可以实现同步移动。在一些替代性的实施例中,第一安装件21可以通过末端本体1上的绳传动机构实现相对末端本体1沿第一方向a移动,绳传动机构可以包括电机、主动轮、从动轮以及传动绳,连接方式与带轮传动机构类似,在此不做赘述。在一些实施例中,可以通过带轮传动机构、绳传动机构或丝杠传动机构驱动第一安装件21相对末端本体1沿第一方向a移动。
44.在一些替代性的实施例中,第一安装件21可以通过末端本体1上的丝杠传动机构实现相对末端本体1沿第一方向a移动。在一些实施例中,丝杠传动机构可以包括电机、丝杠以及丝杠螺母,其中,丝杠螺母两端分别安装在末端本体1的两端并由电机驱动转动,丝杠螺母与第一安装件21固定连接,电机驱动丝杠转动时,会带动丝杠螺母以及第一安装件21实现相对末端本体1沿第一方向a移动。
45.第二安装件22用于安装穿刺针组件3,以对穿刺针组件3的移动进行引导,保持直线移动。在一些实施例中,第二安装件22可以设置在末端本体第二端12。
46.末端本体第一端11指的是末端本体1沿第一方向a的其中一个端部,末端本体第二端12指的是末端本体1沿第一方向a的另一个端部。在一些实施例中,第二安装件22能够相对末端本体1固定设置。在一些实施例中,第二安装件22可以对穿刺针组件3的移动进行导向。
47.在一些实施例中,第一方向a可以根据第一安装件21和第二安装件22进行确定。例如,连接第一安装件21和与其对应安装的第二安装件22的中心点得到一条直线,该直线所在方向即可以确定为第一方向a。
48.在一些实施例中,各穿刺针安装组件2的移动方向与第一方向a平行。这里的平行指的是各穿刺针安装组件的移动方向与第一方向a之间的夹角在0
°±5°
范围内。
49.前述一些实施例通过多个穿刺针安装组件2实现多个穿刺针组件3沿着第一方向移动,从而可以自动化地布针,比手工布针更加稳定可靠。
50.在一些实施例中,多个穿刺针安装组件2中的至少一个还可以包括穿刺针安装槽23。
51.穿刺针安装槽23用于放置穿刺针组件3。在一些实施例中,穿刺针安装组件2可以沿第一方向a开设在末端本体1上。在一些实施例中,各个穿刺针安装槽23之间在末端本体1的圆周方向上等距离分布。在一些实施例中,各个穿刺针安装槽23之间相互平行。穿刺针组件3安装在穿刺针安装槽23内之后,可以沿着穿刺针安装槽23的纵向移动。在一些实施例中,第一方向a可以与穿刺针安装槽23的纵向平行。
52.在一些实施例中,第一安装件21可以设置在穿刺针安装槽23的第一端,穿刺针安装槽23的第一端与末端本体第一端11对应。在一些实施例中,第二安装件22可以设置在穿刺针安装槽23的第二端,穿刺针安装槽23的第二端与末端本体第二端12对应。
53.前述一些实施例通过设置穿刺针安装槽23,可以为各个穿刺针组件3提供安装空间,以及对穿刺针组件3的移动进行导向以使穿刺针组件3稳定地沿直线移动;并且,整个穿刺针末端具有排布整齐、结构紧凑的特点。
54.在一些实施例中,第二安装件22上可以设置穿刺针导向结构24。穿刺针导向结构24用于对穿刺针组件3的移动进行导向。
55.在一些实施例中,当所述第二安装件22上设置穿刺针导向结构24时,穿刺针导向结构24上可以开设导向孔241,导向孔241的轴线方向与第一方向a平行,如图2a、图2b所示。穿刺针组件3可以穿过导向孔241并在导向孔241中移动。导向孔241可以对穿刺针组件3的移动提供导向作用。
56.在一些替代性的实施例中,穿刺针导向结构24上可以开设c型导向槽(图中未示出),导向槽的轴线方向与第一方向a平行。穿刺针组件3可以从侧部直接卡进导向槽中并在导向槽中移动。导向槽可以对穿刺针组件3的移动提供导向作用。
57.在一些替代性的实施例中,末端本体1上可以设置第一安装件导向结构。例如,第一安装件导向结构可以为相互平行的两根导向轨并设置在末端本体1上对应于穿刺针安装槽23的两侧,第一安装件21设置在两根导向轨之间。又例如,第一安装件导向结构可以为导向环并套接在末端本体1上,该导向环分别与各个第一安装件21固定连接,从而实现各个第一安装件21之间的距离相对固定。当导向环在末端本体1上移动时,各第一安装件21随着一起同步移动。
58.在一些替代性的实施例中,第二安装件22上可以设置穿刺针导向结构24,末端本体1上可以设置第一安装件导向结构。
59.在一些替代性的实施例中,第二安装件22上可以设置穿刺针导向结构24,多个穿刺针安装组件2中的至少一个可以包括穿刺针安装槽23。
60.在一些实施例中,第一安装件21和/或第二安装件22上可以设置第一可伸缩结构25,如图3所示。图3是本说明书一些实施例的第一可伸缩结构25的示例性结构图。
61.第一可伸缩结构25用于调节第一安装件21和/或第二安装件22到末端本体1之间的距离。
62.在一些实施例中,第一可伸缩结构25可以为类似于多节且可伸缩形式的天线结
构。在一些替代性的实施例中,第一可伸缩结构25可以为液压缸、气缸或其他可以实现伸缩的组件。
63.在一些实施例中,第一可伸缩结构25的一端可以与第一安装件21固定连接,第一可伸缩结构25的另一端可以与末端本体1固定连接。在一些替代性的实施例中,第一可伸缩结构25的一端可以与第二安装件22固定连接,第一可伸缩结构25的另一端可以与末端本体1可拆卸连接。
64.前述一些实施例通过设置第一可伸缩结构25,可以调节调节第一安装件21和/或第二安装件22到穿刺针组件3之间的距离,从而调节穿刺针组件的进针方向。
65.在一些实施例中,穿刺设备末端100还可以包括通过第一安装件21和第二安装件22安装在穿刺针安装组件2上的穿刺针组件3,如图1所示。
66.在一些实施例中,穿刺针组件3可以包括内针31和外针32,外针32可以套设在内针31外,如图1、图4所示。图4是本说明书一些实施例的穿刺针组件3的示例性结构图。在一些替代性的实施例中,穿刺针组件3可以为一根实心的针。
67.在一些实施例中,外针32与内针31可以通过连接结构可选择地连接或分离。外针32与内针31连接时,外针32与内针31可以同步移动。外针32与内针31分离时,外针32可以位置固定,内针31可以相对于外针32沿着第一方向a独立进行移动(前进或后退)。关于连接结构的结构,可以参考后面关于图5a、图5b、图6a、图6b的说明内容。
68.在一些实施例中,第一安装件21的位置在内针31的放电过程中不锁死,以使内针31可以随穿刺对象的动作(例如呼吸过程中胸部有起伏)而移动,从而避免内针31在穿刺对象的移动过程中位置产生偏差(例如扎得更深或有部分退出)而影响手术效果。在一些实施例中,第一安装件21可以由带轮传动机构、绳传动机构或丝杠传动机构驱动着相对末端本体1沿第一方向a移动,当控制带轮传动机构、绳传动机构或丝杠传动机构任一个的电机松开离合后,第一安装件21即可实现不锁死。
69.在一些实施例中,所述内针31的位置在放电过程中不锁死(例如,第一安装件21不锁死,即可实现内针31的位置不锁死),以使内针31可以随所述穿刺对象的动作而移动。
70.一些实施例中,内针31可以包括内针针体311和内针针帽312,如图4、图5a所示。图5a是本说明书一些实施例的外针31的示例性结构图。
71.在一些实施例中,外针32可以包括外针针体321和外针针帽322,如图4、图5b所示。图5b是本说明书一些实施例的内针32的示例性结构图。
72.在一些实施例中,连接结构可以包括设置在内针针帽312和外针针帽322的其中一个上的第二可伸缩结构3121,以及设置在内针针帽312和外针针帽322的另一个上的凹陷3221。第二可伸缩结构3121能够与凹陷3221配合或分离。凹陷3221指的是外针针帽322上的一个向内凹的结构,该结构能够与第二可伸缩结构3121进行配合以阻止内针32相对于外针31移动。凹陷3221的结构可以包括而不限于卡槽、圆形孔、三角形孔、多边形孔等。例如,第二可伸缩结构3121伸长,伸进凹陷3221中,即可实现二者之间的配合,从而可以使得内针31与外针32同步移动。又例如,第二可伸缩结构3121缩短,退出凹陷3221,即可实现二者之间的分离,从而可以使得内针31相对于外针32独立地沿第一方向a移动(例如前进或后退)。
73.在一些实施例中,连接结构可以包括如图5a所示的设置在内针针帽312上的第二可伸缩结构3121以及如图5b所示的设置在外针针帽322上的凹陷3221。
74.第二可伸缩结构3121可以为电磁弹性组件、丝杠传动组件或其他可以实现伸缩的组件。在一些实施例中,电磁弹性组件形式的第二可伸缩结构3121可以如图6a所示。图6a是本说明书一些实施例中的电磁弹性组件600a的结构示意图。
75.如图6a所示,电磁弹性组件600a可以包括第一壳体610、电磁铁620、复位弹簧630和连接段640。第一壳体610的内部空腔分为容纳段611和导向段612,电磁铁620置于容纳段611内,复位弹簧630和连接段640置于导向段612内。连接段640可以为导磁材料(例如铁)制成。在一些实施例中,电磁铁620通电后,吸引连接段640向电磁铁620靠近并压缩复位弹簧630,连接段640从凹陷3221中退出,从而实现内针31与外针32之间的分离。电磁铁620断电后,复位弹簧630恢复自然长度,如果此时凹陷3221的位置与连接段640的位置相对应,则复位弹簧630可以推动连接段640伸进凹陷3221内,从而实现内针31与外针32之间的连接。
76.关于对电磁铁620的控制,可以参考后面关于图8的说明内容。
77.在一些实施例中,丝杠传动组件形式的第二可伸缩结构3121可以如图6b所示。图6b是本说明书一些实施例中的丝杠传动组件600b的结构示意图。
78.如图6b所示,丝杠传动组件600b可以包括驱动组件650、第二壳体660、丝杠670、丝杠螺母680和伸缩块690。在一些实施例洪,丝杠670及其上的丝杠螺母680安装在第二壳体660内,丝杠670可以由驱动组件650驱动转动,在丝杠670转动时丝杠螺母680可以在第二壳体660内沿着丝杠670的轴向移动,丝杠螺母680移动时,带动与丝杠螺母680连接的伸缩块690一起移动。在一些实施例中,驱动组件650可以包括电机651、传动带652和传动轮653,电机651可以安装在第二壳体660上,电机651的输出端转动时通过传动带652带动安装在丝杠670上的传动轮653转动,从而带动丝杠转动。当伸缩块690伸进凹陷3221内时,内针31与外针32之间实现连接,内针31不可以相对于外针32移动。当伸缩块690退出凹陷3221时,内针31与外针32之间实现分离,内针可以相对于外针32移动。
79.前述一些实施例通过第二可伸缩结构3121可以方便地实现内针31与外针32之间的连接或分离。
80.外针32为电绝缘针,内针31为电极针,外针32在内针31放电时不导电。在一些实施例中,外针32的材料可以为电绝缘材料,例如绝缘钢。在一些实施例中,外针32内壁镀电绝缘层。
81.在一些实施例中,通过调整内针针体311伸出外针针体321的长度来控制内针针体311在术式手术过程中的放电长度,从而可以将各内针针体311之间形成的电场控制在肿瘤所在区域。例如,内针针体311伸出外针针体321的长度越长,各内针针体311之间形成的电场在第一方向a上的长度就越长。又例如,内针针体311伸出外针针体321的长度缩短,各内针针体311之间形成的电场在第一方向a上的长度就相应缩短。
82.在一些实施例中,末端本体1的两端中至少一个设有连接接口(图中未示出)。
83.连接接口用于实现末端本体1与机械臂4之间的机械连接和电气连接。在一些实施例中,第一安装件21通过电气接口与机械臂4之间实现电气连接,从而可以控制第一安装件21相对末端本体1沿第一方向a的移动。在一些实施例中,第一可伸缩结构25通过电气接口与机械臂4之间实现电气连接,从而可以实现通过第一可伸缩结构25的伸缩控制来调节第一安装件21和/或所述第二安装件22到穿刺针组件3之间的距离。在一些实施例中,第二可伸缩结构3121通过电气接口与机械臂4之间实现电气连接,从而可以控制第二可伸缩结构
3121伸进或退出凹陷3221,实现内针31与外针32的连接或分离。
84.在一些实施例中,穿刺针组件3通过电气接口与机械臂4之间实现电气连接。在一些实施例中,内针31通过电气接口与机械臂4之间实现电气连接。
85.穿刺设备末端通过末端本体上的连接接口与机械臂之间实现机械连接和电气连接后,具体的电气控制可以参考后面关于图8的说明内容。
86.图7是本说明书一些实施例的穿刺系统700的示例性结构图。
87.本说明书实施例还提供了一种穿刺系统700,如图7所示。穿刺系统700包括穿刺设备末端100,以及机械臂4。
88.穿刺设备末端100可以为前述任一实施例所述的穿刺设备末端100。一些实施例中,穿刺设备末端100通过末端本体1两端的连接接口实现与机械臂之间的机械连接和电气连接。在另一些实施例中,穿刺设备末端100通过末端本体1其中一端的连接接口实现与机械臂之间的机械连接和电气连接。
89.图8是本说明书一些实施例的穿刺系统700的应用场景800的示例性框图。
90.在一些实施例中,应用场景800可以包括操作间和扫描间,在操作间中设置控制台、主动系统,在扫描间中设置扫描仪和从动系统,如图8所示。在一些实施例中,主动系统可以包括主手、第一处理器以及穿刺参数规划模块。在一些实施例中,从动系统可以包括从手、第二处理器以及前述任一实施例所述的穿刺设备末端100。主手和从手共同组成完整的机械臂。
91.扫描仪用于获取图像数据,例如患者的肿瘤部位的图像。在一些实施例中,扫描仪可以接收控制台的控制信号并根据控制信号获取图像数据,然后将图像数据传输到控制台。
92.控制台作为扫描仪的控制系统。在一些实施例中,控制台可以接收主动系统的控制命令并根据控制命令向扫描仪发出控制信号,从而控制扫描仪进行扫描操作以获取图像数据。在一些实施例中,控制台可以接收扫描仪传输的图像数据。在一些实施例中,控制台可以将接收到的图像数据进行显示。在一些实施例中,控制台可以将接收到的图像数据传输到主动系统。
93.在一些实施例中,主手用于使得操作者可以在操作间内远程操控处于扫描间内的从手,在扫描仪的图像数据的引导之下,从手将穿刺设备末端100送至规划的靶点位置并进行术式手术。
94.规划的靶点位置可以指穿刺对象身上与肿瘤相关的位置。例如图11中的第一位置1106和第二位置1107,关于第一位置1106和第二位置1107,可以参考后面关于图11的说明内容。穿刺对象指的是患有肿瘤的患者。
95.在一些实施例中,穿刺参数规划模块用于根据穿刺设备末端100从当前位置到规划的靶点位置进行路径规划以及内针31的放电规划。在一些实施例中,路径规划可以包括主手的路径规划、从手的路径规划、第一可伸缩结构25的伸缩规划、第二可伸缩结构3121的伸缩规划、第一安装件21或/和第二安装件22的移动路径规划。在一些实施例中,放电规划可以包括放电的电流大小和/或放电的时间。
96.在一些实施例中,第一处理器用于分别与控制台和第二处理器进行通信,以实现对扫描仪和从动系统的控制。
97.在一些实施例中,从手与穿刺设备末端之间通过末端本体1上的连接接口实现机械连接和电气连接。从手上设置有与末端本体1上的连接接口相匹配的连接接口,末端本体1可以通过插接方式便捷地与从手连接或分离。
98.在一些实施例中,第二处理器用于接收第一处理器发出的控制信号,并向第一处理器发送反馈信号。在一些实施例中,第二处理器可以向从手和/或穿刺设备末端100发送控制信号,以使从手和/或穿刺设备末端100完成穿刺针穿刺和术式手术。
99.图9是本说明书一些实施例的控制方法900的示例性流程图。如图9所示,方法900可以包括步骤910、步骤920以及步骤930。
100.在步骤910中,可以根据计划信息确定穿刺参数。在一些实施例中,步骤910可以由应用场景800中的穿刺参数规划模块执行。在一些实施例中,计划信息可以包括待术式手术处理的肿瘤的位置、形状信息。
101.在一些实施例中,穿刺参数可以包括目标穿刺针组件的数量以及目标穿刺针组件的位置。在一些实施例中,穿刺参数还包括第一可伸缩结构25、第一安装件21和/或第二安装件22的伸缩规划信息,以用于调整目标穿刺针组件的位置。在一些实施例中,穿刺参数可以包括电场规划信息。在一些实施例中,电场规划信息可以包括第二可伸缩结构3121的伸缩规划信息、电场的形状信息(例如长、宽、高)、电场强度和/或电场持续时间。在一些实施例中,穿刺参数可以包括路径规划信息。在一些实施例中,路径规划信息可以包括主手的路径规划信息和/或从手的路径规划信息。
102.在步骤920中,可以根据穿刺参数确定多个目标穿刺针组件。在一些实施例中,步骤920可以确定目标穿刺针组件的数量以及目标穿刺针组件的位置(即具体选择哪一个或哪些穿刺针组件)。在一些实施例中,步骤920可以由应用场景800中的第二处理器执行。在一些实施例中,穿刺参数规划模块确定穿刺参数后,将穿刺参数发送到第二处理器,第二处理器根据穿刺参数确定需要使用穿刺设备末端的多个穿刺针组件3中的部分或全部作为目标穿刺针组件。
103.在步骤930中,可以控制多个目标穿刺针组件同步执行穿刺动作。在一些实施例中,步骤930可以由应用场景800中的第二处理器执行。关于步骤930的详细过程,可以参考后面关于图10的说明内容。
104.前述实施例通过控制多个目标穿刺针组件同步执行穿刺动作,可以实现自动化布针,以满足严苛的布针要求。
105.图10是本说明书一些实施例的控制方法900中的步骤930的示例性流程1000。如图10所示,流程1000可以包括步骤1010、步骤1020和步骤1030。在一些实施例中,流程1000还可以包括步骤1040。在一些实施例中,流程1000还可以包括步骤1050、步骤1060和步骤1070。
106.在步骤1010中,可以控制目标穿刺针组件的内针31和外针32一起进入穿刺对象至第一位置1106。在一些实施例中,步骤1010可以由第一安装件21执行。在一些实施例中,第一安装件21的移动由第二处理器控制。
107.穿刺对象指的是患有肿瘤的患者。
108.第一位置1106指的是,外针32在穿刺过程中最终到达的肿瘤边缘的位置,在该位置,内针31与外针32分离,外针32停留在第一位置1106,内针31继续穿刺,如图11所示。各个
外针32所到达的第一位置1106可以处于同一个平面内。例如,如图11所示,第一穿刺针组件1101的外针32和第二穿刺针组件1102的外针32所到达的第一位置1106均处于第一平面1104内。
109.在步骤1010中,目标穿刺针组件的内针31和外针32之间通过第二可伸缩结构3121伸入凹陷3221中实现内针31与外针32的同步移动。
110.在一些实施例中,各个目标穿刺针组件的内针31和外针32可以同步一起进入穿刺对象至第一位置1106。
111.在步骤1020中,可以控制内针31与外针32分离。在一些实施例中,步骤1020可以由第二可伸缩结构3121执行。在一些实施例中,第二可伸缩结构3121的伸缩由第二处理器控制。在一些实施例中,内针31与外针32的分离可以通过第二处理器控制第二可伸缩结构3121退出凹陷3221进行实现。内针31与外针32同步穿刺到达第一位置1106之后,第二可伸缩结构3121退出凹陷3221使得内针31与外针32分离,内针31继续穿刺,外针32将停留在第一位置1106。
112.在一些实施例中,各个目标穿刺针组件的内针31与外针32可以同步分离。
113.在步骤1030中,可以控制内针31继续进入穿刺对象至第二位置1107。在一些实施例中,步骤1030可以由第一安装件21执行。在一些实施例中,第一安装件21的移动由第二处理器控制。
114.第二位置1107指的是内针31在穿刺过程中最终到达的规划的治疗位置。内针31被继续运送至第二位置1107后,即可开始进行纳米刀治疗,如图11所示。各个内针31所到达的第二位置1107可以处于同一个平面内。例如,如图11所示,第一穿刺针组件1101的内针31和第二穿刺针组件1102的内针31所到达的第二位置1107均处于第二平面1105内。
115.在一些实施例中,各个目标穿刺针组件的内针31可以同步进入穿刺对象至第二位置1107。
116.在一些实施例中,第二位置1107与第一位置1106之间的距离可以根据肿瘤1103的形状和大小进行确定。
117.前述一些实施例可以控制多个目标穿刺针组件的外针32同步进入穿刺对象的第一位置1106,以及控制多个目标穿刺针组件的内针31同步进入穿刺对象的第二位置1107,实现多个目标穿刺针组件的自动化布针。
118.在步骤1040中,可以控制内针31在手术过程中放电形成电场。在一些实施例中,步骤1040可以由第二处理器对内针31的放电进行控制。
119.在一些实施例中,各个目标穿刺针组件的内针31可以同步放电。
120.在一些实施例中,第一安装件21相对末端本体1沿第一方向a的移动可以通过带轮传动机构、绳传动机构或丝杠传动机构驱动实现。在一些实施例中,内针31的位置在放电过程中不锁死,以使内针31可以随穿刺对象的动作而移动。在一些实施例中,当控制带轮传动机构、绳传动机构或丝杠传动机构任一个的电机松开离合后,内针31即可实现不锁死。在内针31的放电过程中,由于各个第一安装件21的位置并不锁定,内针31可以在摩擦力的作用下随着穿刺对象的轻微呼吸而相对末端本体1沿第一方向a进行同步移动,以避免内针31穿刺到更深的位置而给穿刺对象带来不必要的损伤。例如,内针31进一步刺入后可能会刺到更深处的健康组织,与此同时,各内针31之间的电场也可能会产生以为而伤及更深处的健
康组织)。
121.前述一些实施例中,由于外针32由电绝缘材料制成,当外针32到达第一位置1106且内针31到达第二位置1107后,通过内针31的放电,可以在第一位置1106与第二位置1107之间的各内针31之间形成电场,从而将电场精确地控制在肿瘤1103所在区域,对肿瘤1103进行术式手术,避免对电场外的细胞造成损害。
122.在步骤1050中,可以控制内针31从第二位置1107回退至第一位置1106。在一些实施例中,步骤1050可以由第一安装件21执行。在一些实施例中,第一安装件21的移动由第二处理器控制。
123.在一些实施例中,各个目标穿刺针组件的内针31可以同步从第二位置1107回退至第一位置1106。
124.在步骤1060中,可以控制内针31与外针32连接。在一些实施例中,步骤1060可以由第二可伸缩结构3121执行。在一些实施例中,第二可伸缩结构3121的伸缩由第二处理器控制。在一些实施例中,内针31与外针32的连接可以通过第二处理器控制伸进凹陷3221中进行实现。在一些实施例中,当内针31回退到第一位置1106之后,通过第二处理器控制第二可伸缩结构3121伸入凹陷3221中,实现内针31与外针32的连接。
125.在一些实施例中,各个目标穿刺针组件的内针31与外针32同步连接。
126.在步骤1070中,可以控制内针31与外针32一起从第一位置1106退出穿刺对象。在一些实施例中,步骤1070可以由第一安装件21执行。在一些实施例中,第一安装件21的移动由第二处理器控制。
127.在一些实施例中,各个目标穿刺针组件的内针31与外针32同步地一起从第一位置1106退出穿刺对象。
128.前述一些实施例可以在术式手术后自动化退出内针31和外针32,减少对人的依赖。
129.在一些替代性的实施例中,可以在术式手术后,通过第二处理器控制第一可伸缩结构25和第二可伸缩结构3121分别与目标穿刺针组件分离,然后通过人工取出目标穿刺针组件。
130.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
131.以上所述实施例仅表达了本说明书的几种实施例,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1