用于健康机器人的安装架的制作方法
1.本实用新型属于安装设备的技术领域,更具体地说,是涉及一种用于健康机器人的安装架。
背景技术:
2.现代生活中,用于人体健康方面的机器人(比如电动轮椅)的应用越来越广泛。电动轮椅可以参阅:(中国实用新型专利;公开号:cn111839917a;主题名称:电动轮椅;公开日:2020.10.30)。电动轮椅经常需要前后移动。当需要将物体(在一个实施例中,物体为:cn111839917a中给电动轮椅供电的电源块9)固定在电动轮椅的架体上时,通常直接将物体固定在电动轮椅的架体上。一旦物体和架体之间发生了松动(在一个实施例中,物体通过螺钉固定在架体上),电动轮椅的架体在前后移动过程中,很容易造成物体相对架体向前或向后移动,物体在相对架体向前或向后移动时容易与架体之间的磕碰。
技术实现要素:
3.本实用新型的目的在于提供一种用于健康机器人的安装架,以解决现有技术中设置在架体上的物体和架体之间发生了松动后,架体在前后移动过程中,设置在架体上的物体和架体之间容易磕碰的技术问题。
4.为实现上述目的,本实用新型采用的技术方案是:提供一种用于健康机器人的安装架,包括:架体、前后间隔设置在所述架体上的第一横杆和第二横杆、箱体、设置在所述箱体一端的第一支撑件,以及设置在所述箱体另一端的第二支撑件;所述第一横杆的顶部设置有第一凸台,所述第二横杆的顶部设置有第二凸台;所述第一支撑件支撑固定在所述第一凸台上,所述第二支撑件支撑固定在所述第二凸台上;所述箱体位于所述第一横杆和所述第二横杆之间。
5.进一步地,所述第一凸台和所述第二凸台的高度相同。
6.进一步地,所述第一横杆呈圆柱状。
7.进一步地,所述第一横杆在水平方向延伸。
8.进一步地,所述第二横杆呈圆柱状。
9.进一步地,所述第二横杆在水平方向延伸。
10.进一步地,所述第一凸台的顶面为水平面,所述第一支撑件支撑固定在所述第一凸台的顶面上。
11.进一步地,所述第二凸台的顶面为水平面,所述第二支撑件支撑固定在所述第二凸台的顶面上。
12.进一步地,所述第一支撑件呈l状;所述第一支撑件包括:第一横板和第一竖板;所述第一竖板固定在所述箱体上,所述第一横板支撑固定在所述第一凸台上。
13.进一步地,所述第二支撑件呈l状;所述第二支撑件包括:第二横板和第二竖板;所述第二竖板固定在所述箱体上,所述第二横板支撑固定在所述第二凸台上。
14.本实用新型提供的用于健康机器人的安装架的有益效果在于:与现有技术相比,本实用新型提供的用于健康机器人的安装架,架体上设置有第一横杆和第二横杆;第一横杆和第二横杆分别前后间隔设置在架体上;物体可放置在箱体内,箱体位于第一横杆和第二横杆之间,使得箱体的前后晃动被限制在第一横杆和第二横杆之间,保障了箱体的前后稳定性,即使箱体向前或向后且也容易磕碰到第一横杆和第二横杆上,减少箱体向前或向后磕碰到架体上;箱体的一端具有第一支撑件,箱体的另一端具有第二支撑件;第一横杆上设置有第一凸台,第一支撑件支撑固定在第一凸台上,第一支撑件与第一横杆之间通过第一凸台间接连接,减少第一支撑件与第一横杆之间的直接摩擦,减少因第一支撑件与第一横杆之间磨损而减小第一横杆的机械强度,提升箱体的稳定性;第二横杆上设置有第二凸台,第二支撑件支撑固定在第二凸台上,第二支撑件与第二横杆之间通过第二凸台间接连接,减少第二支撑件与第二横杆之间的直接摩擦,减少因第二支撑件与第二横杆之间磨损而减小第二横杆的机械强度,提升箱体的稳定性;物体可以放置在箱体中,物体可以的得到箱体的保护,减少物体与架体之间的磕碰;也就是说,为了减少物体和架体之间的磕碰,采用了两种保护:第一种保护是将物体放入箱体内,使得物体不容易磕碰到架体上;第二种保护是箱体的前后被限制在第一横杆和第二横杆之间,箱体在第一横杆和第二横杆的保护下不容易直接磕碰到架体上,位于箱体内的物体更不容易直接磕碰到架体上。
附图说明
15.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1为本实用新型实施例提供的箱体的安装立体示意图;
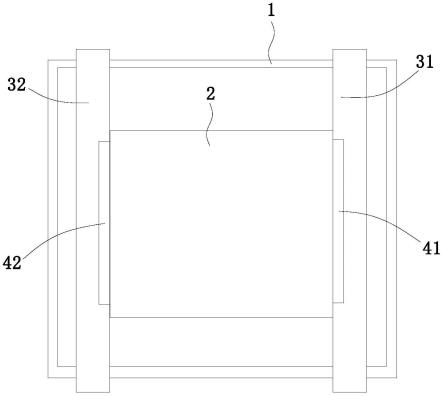
17.图2为本实用新型实施例提供的用于健康机器人的安装架的俯视示意图。
18.其中,图中各附图标记:
19.1-架体;2-箱体;31-第一横杆;311-第一凸台;32-第二横杆;41-第一支撑件;411-第一横板;412-第一竖板;42-第二支撑件。
具体实施方式
20.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
22.需要说明的是,在本技术实施例的描述中,除非另有说明,“/”表示或的意思,例如,a/b可以表示a或b;本文中的“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。其中,a,b分别可以是单数或者复数。
23.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
25.请一并参阅图1,现对本实用新型提供的用于健康机器人的安装架进行说明。用于健康机器人的安装架包括:架体1、前后间隔设置在架体1上的第一横杆31和第二横杆32、箱体2、设置在箱体2一端的第一支撑件41,以及设置在箱体2另一端的第二支撑件42;第一横杆31的顶部设置有第一凸台311,第二横杆32的顶部设置有第二凸台;第一支撑件41支撑固定在第一凸台311上,第二支撑件42支撑固定在第二凸台上;箱体2位于第一横杆31和第二横杆32之间。
26.如此,架体1上设置有第一横杆31和第二横杆32;第一横杆31和第二横杆32分别前后间隔设置在架体1上;物体可放置在箱体2内,箱体2位于第一横杆31和第二横杆32之间,使得箱体2的前后晃动被限制在第一横杆31和第二横杆32之间,保障了箱体2的前后稳定性,即使箱体2向前或向后且也容易磕碰到第一横杆31和第二横杆32上,减少箱体2向前或向后磕碰到架体1上;箱体2的一端具有第一支撑件41,箱体2的另一端具有第二支撑件42;第一横杆31上设置有第一凸台311,第一支撑件41支撑固定在第一凸台311上,第一支撑件41与第一横杆31之间通过第一凸台311间接连接,减少第一支撑件41与第一横杆31之间的直接摩擦,减少因第一支撑件41与第一横杆31之间磨损而减小第一横杆31的机械强度,提升箱体2的稳定性;第二横杆32上设置有第二凸台,第二支撑件42支撑固定在第二凸台上,第二支撑件42与第二横杆32之间通过第二凸台间接连接,减少第二支撑件42与第二横杆32之间的直接摩擦,减少因第二支撑件42与第二横杆32之间磨损而减小第二横杆32的机械强度,提升箱体2的稳定性;物体可以放置在箱体2中,物体可以的得到箱体2的保护,减少物体与架体1之间的磕碰;也就是说,为了减少物体和架体1之间的磕碰,采用了两种保护:第一种保护是将物体放入箱体2内,使得物体不容易磕碰到架体1上;第二种保护是箱体2的前后被限制在第一横杆31和第二横杆32之间,箱体2在第一横杆31和第二横杆32的保护下不容易直接磕碰到架体1上,位于箱体2内的物体更不容易直接磕碰到架体1上。
27.在一个实施例中,箱体2夹持在第一横杆31和第二横杆32。
28.在一个实施例中,第一支撑件41设置在箱体2后端,以及第二支撑件42设置在箱体2前端。
29.在一个实施例中,第一横杆31和第二横杆32的高度相同。
30.在一个实施例中,第一横杆31和第二横杆32平行设置。
31.在一个实施例中,第一凸台311位于第一横杆31的顶部。
32.在一个实施例中,第二凸台位于第二横杆32的顶部。
33.在一个实施例中,第一支撑件41支撑在第一凸台311上。
34.在一个实施例中,第二支撑件42支撑在第二凸台上。
35.在一个实施例中,第一支撑件41通过螺钉固定在第一横杆31上。
36.在一个实施例中,第二支撑件42通过螺钉固定在第二横杆32上。
37.在一个实施例中,第一支撑件41在左右方向上延伸。其中,前后左右以电动轮椅的方位为准。
38.在一个实施例中,第二支撑件42在左右方向上延伸。其中,前后左右以电动轮椅的方位为准。
39.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第一凸台311和第二凸台的高度相同。如此,便于箱体2的安装。
40.在一个实施例中,在水平方向上,箱体2位于第一横杆31和第二横杆32之间。如此,箱体2可以得到第一横杆31和第二横杆32的保护。
41.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第一横杆31呈圆柱状。如此,圆柱状第一横杆31加工方便。
42.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第一横杆31在水平方向延伸。如此,箱体2水平晃动时不容易磕碰到第一横杆31上。
43.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第二横杆32呈圆柱状。如此,圆柱状第二横杆32加工方便。
44.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第二横杆32在水平方向延伸。如此,箱体2水平晃动时不容易磕碰到第二横杆32上。
45.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第一凸台311的顶面为水平面,第一支撑件41支撑固定在第一凸台311的顶面上。如此,第一支撑件41支撑固定在第一凸台311的顶面上更加平稳。
46.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第二凸台的顶面为水平面,第二支撑件42支撑固定在第二凸台的顶面上。如此,第二支撑件42支撑固定在第二凸台的顶面上更加平稳。
47.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第一支撑件41呈l状;第一支撑件41包括:第一横板411和第一竖板412;第一竖板412固定在箱体2上,第一横板411支撑固定在第一凸台311上。如此,l状的第一支撑件41容易形变并释放应力,提升箱体2的减震能力。
48.进一步地,请参阅图1,作为本实用新型提供的用于健康机器人的安装架的一种具体实施方式,第二支撑件42呈l状;第二支撑件42包括:第二横板和第二竖板;第二竖板固定在箱体2上,第二横板支撑固定在第二凸台上。如此,l状的第二支撑件42容易形变并释放应力,提升箱体2的减震能力。
49.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1