经桡动脉穿刺PCI多功能固定手托的制作方法
本技术涉及医疗护理装备,具体涉及一种经桡动脉穿刺pcl多功能固定手托。
背景技术:
1、随着pci技术的推广和普及,经桡动脉入径行pci已被广泛应用于临床,成为许多冠心病患者的首要治疗手段。
2、在桡动脉穿刺的过程中,为提高桡动脉穿刺的成功率,需要将患者的腕部垫高,保持腕关节处于过伸状态,具体来说,通常在穿刺前需要先将患者的手部固定住,并且调整至合适的状态,避免在穿刺的过程中因手部的移动或手腕的转动导致穿刺失败。
3、同时,由于不同患者的手腕能够弯曲和伸展的程度不同,而简单的手臂固定装置就无法根据不同患者的具体情况进行适应性调整,特别是现有的装置通常为板状,仅仅能够实现对手臂的线支撑或者小面积的面支撑,对患者的手臂整体支撑不完全,容易使患者的手臂长时间处于不舒适的状态;另外,现有的手托适用性低,使用范围窄,降低了其使用效果。
技术实现思路
1、为解决上述问题,本实用新型提供了一种经桡动脉穿刺pci多功能固定手托,首先该手托整体可采用多种固定和支撑方式,能够为桡动脉穿刺提供必要的支撑和固定功能,其次,该手托的支撑结构是通过密集排布的可上下浮动的支撑构件进行调节,而侧面的定位结构则采用可精准充放气的气囊来实现控制,并且支撑结构和定位结构的动作均基于压力感应系统。
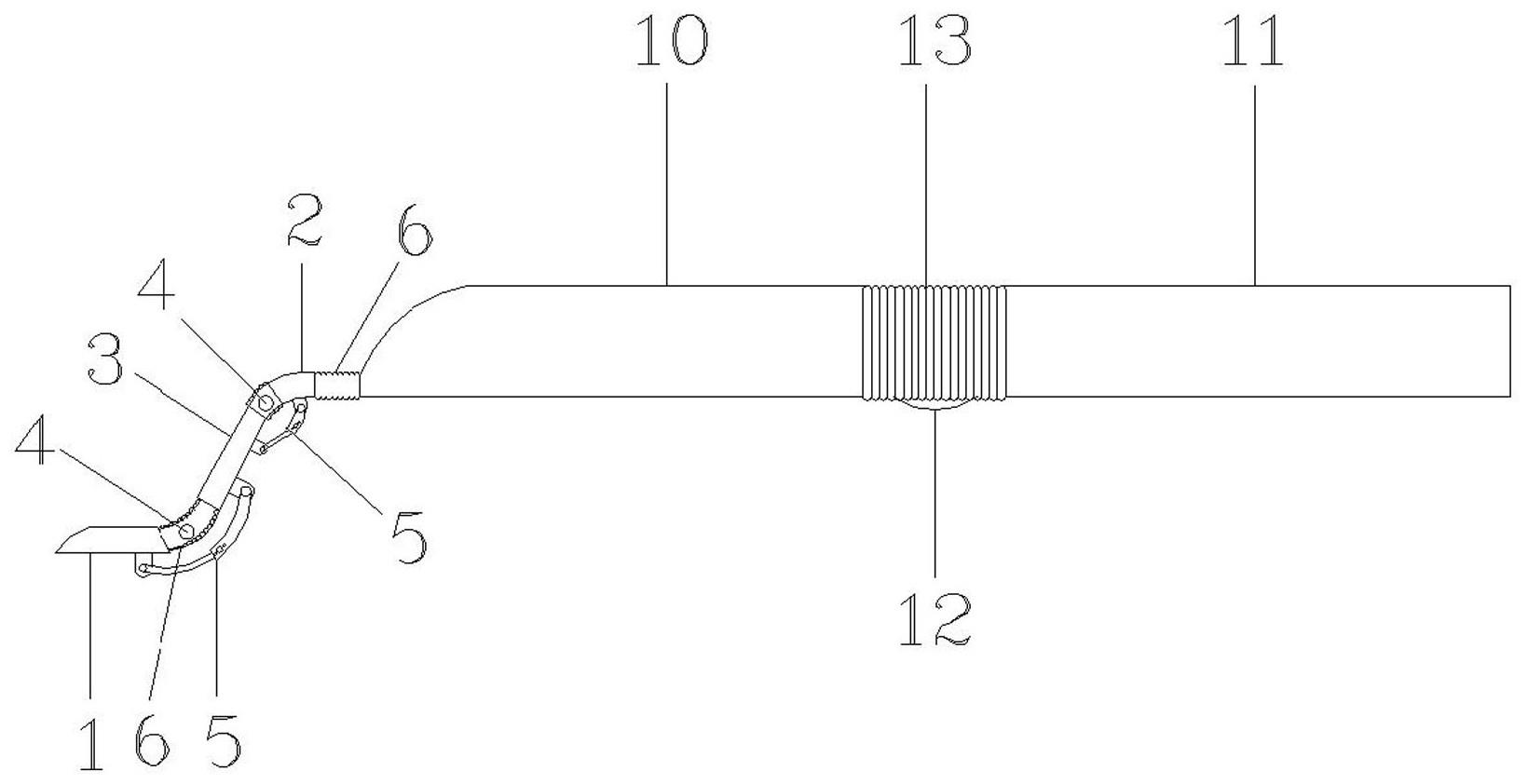
2、为实现上述目的,本实用新型采用以下技术方案:经桡动脉穿刺pci多功能固定手托,包括手托本体和固定支撑构件,所述手托本体包括手掌支撑构件和手臂支撑构件,其中手掌支撑构件与手臂支撑构件之间为半活动连接结构,手臂支撑构件为整体结构;固定支撑构件用于支撑和固定手托本体。
3、所述手掌支撑构件包括阶梯状内凹板,该内凹板包括两级,第一级在下端,用以支撑和固定除拇指外其余四指;手指根部到腕关节前沿的手掌部分通过第一级和第二级的衔接段支撑,第二级为两侧向内包裹的弧形板,以支撑腕关节前沿至后沿的整个关节段;所述第一级和衔接段,以及衔接段和第二级之间均设置铰接机构,其内均包括转动轴,且在两个铰接机构的背面分别设置连接第一级和衔接段,以及衔接段和第二级的可伸缩连接杆;上述三个构件中任意两个相邻的构件均能绕转动轴实现相互转动。
4、所述手掌支撑构件的上表面铺设整块的软质材料层,且在任意两个相邻的可转动构件的连接部位处,该软质材料层设置为波纹状的承拉承压构件。
5、另外,在所述内凹板的第一级上和衔接段上分别设置有手指固定气囊和手掌固定气囊,二者的结构一致,手指固定气囊和手掌固定气囊的主体均贴附在硬质环箍的内侧,对气囊充气的扩张方向进行限定,并分别随硬质环箍横跨内凹板第一级和衔接段,然后通过硬质环箍与内凹板第一级和衔接段的左右两侧相固定,其中手指固定气囊和手掌固定气囊的任意一端连接充气管,并紧贴内凹板的背部延伸至气源处;使用时,手指和手掌依次伸入并位于硬质环箍下方,然后调整两个可伸缩连接杆,将内凹板的第一级、衔接段以及第二级之间的角度调整合适,接着手指固定气囊和手掌固定气囊充气,气囊的主体向硬质环箍内侧手指和手掌的方向凸起,挤压手指和手掌,配合手掌支撑构件上表面铺设的软质材料层对手指和手掌进行固定,并通过控制充气程度,实现手指和手掌弯曲角度的微调。
6、所述手臂支撑构件分为小臂支撑段和上臂支撑段,二者连接形成整体为一长条状的半包裹形内凹板,内表面设置软质材料层;与手掌支撑构件中第二级相连接的为小臂支撑段,二者连接处同样设置铰接结构,小臂支撑段和上臂支撑段之间设置有肘关节承托窝,以及能够任意向偏移的波纹状橡胶连接件;在半包裹形内凹板两侧的弧形内表面上沿手臂支撑构件的长度方向设置若干排相互平行的固定气囊,每一排固定气囊包括若干个相互独立的、施压面积一定的微气囊,微气囊外表面铺设织物层,在每个微气囊与织物层之间设置1个片式压力传感器,单个微气囊的气管由一个阀门控制,实现手臂放置在半包裹形内凹板内,手臂各部位整体承压一致,能够将手臂固定,且不会造成患者明显的不适感和压迫感。具体的控制结构和控制方法为现有技术,详细参考“cn201320437806.8一种基于单气泵实现多气囊不同气压的控制装置”、“cn201320437806.8一种基于单气泵实现多气囊不同气压的控制装置”、“cn201510787082.3一种压力传感器标定装置和方法以及具有该装置的设备”、“cn201710169108.7一种电脑控制多气囊矩阵式医用气垫床”。
7、另外,本技术所述手托本体通过固定支撑构件的支撑和固定来使用,所述固定支撑构件具有两种形式,一种是独立支撑结构,另一种是依附于其他机构,如医疗座椅或者病床的非独立支撑结构。
8、所述独立支撑结构设置在本技术中所述手托本体的下方或侧方,要求将手托本体凸出而不影响其使用,包括具备升降功能的底座,以及固定在底座上的立柱,还包括将立柱和手托本体固定在一起的安装座。
9、所述非独立支撑结构是通过中间构件将本技术所述的手托本体与医疗座椅或者病床相连接而实现支撑和固定,包括与手托本体相固定的连接板,以及旋转横梁,还有通过转轴活动安装在医疗座椅或病床主构件上且能够调节旋转横梁与主构件角度并定位的u型夹持构件,所述u型夹持构件的下部设置调节螺栓。
10、优选的,上述手托本体靠近患者身体的一侧,在手臂支撑构件的下方设置矩形或者扇形的置物板,用于放置穿刺所需的工具或者药品。
11、所述置物板为平整的板状构件或者设置有若干下凹置物槽的复合构件。
12、所述平整的板状置物板通过非独立支撑结构与病床相连接,其能够在手托本体旋转至紧贴病床床沿的状态下收纳进病床下方,保证整个手托具备较为紧凑的结构。
13、本技术所述手托的使用步骤如下:
14、首先根据需要选择独立支撑机构或者非独立支撑机构的手托,并调节合适的高度和角度;
15、然后将患者的手指和手掌分别引导至手掌支撑构件上,依次套入内凹板的第一级、衔接段上的硬质环箍内,之后依次将患者的手臂依照小臂支撑段和上臂支撑段所对应的位置,并以肘关节承托窝为支点放置好;
16、根据不同患者的手臂状态调节姿态,将腕部垫高,保持腕关节处于过伸状态,然后调节第一级和衔接段,以及衔接段和第二级铰接机构背面的可伸缩连接杆并固定,对内凹板的第一级、衔接段上的硬质环箍内侧的气囊充气,将患者手指、手掌、手腕进行固定;
17、接下来对患者的手臂进行微调,然后启动微气囊及配套的片式压力传感器、阀门以及气泵,实现手臂放置在半包裹形内凹板内,手臂各部位整体承压一致,能够将手臂固定,且不会造成患者明显的不适感和压迫感。
18、本技术的有益效果:
19、本技术在使用过程中,通过手掌支撑构件和手臂支撑构件上各个调整、支撑、控制和顶部结构的相互配合,实现对患者手臂的有效定位和固定,使其保持经桡动脉穿刺pci的较佳状态;且通过设置在手腕支撑构件和手臂支撑构件上的气囊和微气囊的调整和定位,可根据病人的体型或身体状况调节手臂状态,手臂各部位整体承压一致,能够将手臂固定,且不会造成患者明显的不适感和压迫感;另外,本技术还可与不同的支撑结构进行有机配合,提高适用性,同时还设置了辅助的置物构件,有助于手术现场的清爽整洁,可一定程度上提高医生穿刺成功率和手术的安全性。
- 还没有人留言评论。精彩留言会获得点赞!