机器人手术系统、装置及使用方法与流程
本文中的装置、系统及方法涉及使用可由单个操作者操作的机器人手术系统的微创手术。
背景技术:
1、许多外科手术正在转向使用微创方法,以便最小化对患者产生的切口的数目及大小。与开放式外科手术相比,例如内窥镜、腹腔镜及胸腔镜手术的微创手术可与降低疼痛、较快术后恢复、缩短住院时间及减少并发症相关联。一般来说,微创机器人手术当前是由两个熟练的外科医生(例如,操作者)执行。主要外科医生执行外科手术任务(例如,解剖、修剪、切割、缝合等),而辅助外科医生则协助这些功能。主要外科医生位于无菌区域外的控制台处,而辅助外科医生位于无菌区内以便通过例如改变耦接到机器人手术系统的器械(例如,末端执行器)来提供帮助。辅助外科医生可通过用每只手固持例如光学传感器(例如,摄像机)及牵开器的器械来协助主要外科医生。因此,可期望提供一种可能不像传统使用的机器人手术系统那么繁琐且资源密集的机器人手术系统。
技术实现思路
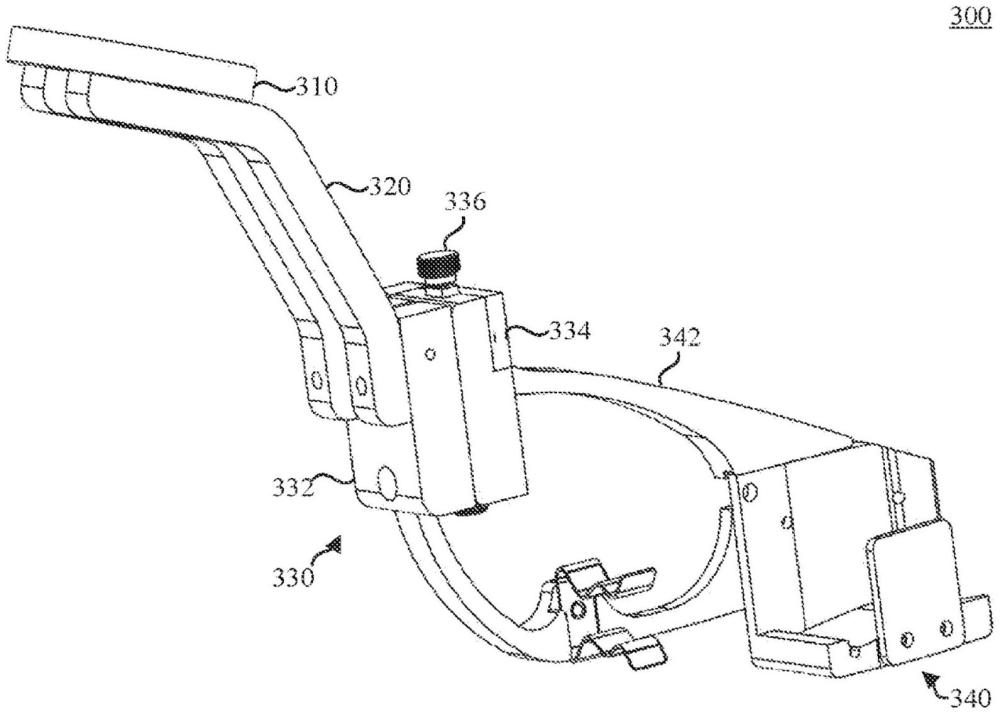
1、本文描述用于微创外科手术的系统、装置及方法。在一些变动中,本文中描述的程序可由单个操作者在没有来自另一操作者的额外协助的情况下执行。大体上,末端执行器连接器可包含:壳体,其经配置以收纳末端执行器;臂,其经配置以可释放地将所述壳体耦接到机器人。所述臂可包括磁性部分及经配置以手动地将所述壳体从所述臂释放的壳体释放机构。
2、在一些变动中,磁性部分可耦接到臂的近端部分。在一些变动中,磁性部分可经配置以通过无菌罩布将所述臂磁耦接到所述机器人。在一些变动中,无菌罩布可耦接于磁性部分与臂之间。在一些变动中,所述磁性部分的第一侧可经配置以机械且磁性地附接到所述支撑臂的凸缘。在一些变动中,所述磁性部分的所述第一侧可包括经配置以收纳一或多个引线的通道。在一些变动中,所述磁性部分可包括经配置以减小径向剪切力的机器人接合特征。在一些变动中,所述机器人接合特征可包括圆形突部。
3、在一些变动中,所述臂可界定圆形凹部。在一些变动中,所述磁性部分可包括旋转对准特征。在一些变动中,所述旋转对准特征可包括线性突部。在一些变动中,所述臂可界定线性凹部。在一些变动中,所述磁性部分可包括经配置以手动地将所述臂从所述机器人释放的磁性释放机构。在一些变动中,所述磁性释放机构可包括一或多个杠杆。在一些变动中,一或多个杠杆可耦接到所述磁性部分的圆周。在一些变动中,所述磁性释放机构可包括经配置以将所述磁性部分推离所述臂的一或多个凸轮。
4、在一些变动中,所述磁性部分可界定第一纵轴,且所述壳体界定第二纵轴。所述第一纵轴与所述第二纵轴可为非平行。在一些变动中,所述第一纵轴与所述第二纵轴之间的第一角可高达约40度。在一些变动中,所述第一角可在约15度与约35度之间,包含其间的所有范围及子值。在一些变动中,收纳于所述壳体中的所述末端执行器可界定平行于所述第二纵轴的第三纵轴。在一些变动中,所述第一纵轴与所述第三纵轴之间的第二角可高达约40度,包含其间的所有范围及子值。在一些变动中,所述第二角可在约15度与约35度之间,包含其间的所有范围及子值。在一些变动中,所述磁性部分可与所述壳体分离开高达约30cm的高度及高达约30cm的长度,包含其间的所有范围及子值。
5、在一些变动中,所述臂可包括臂手柄。在一些变动中,所述臂手柄可经配置以由操作者的第一只手固持。在一些变动中,所述磁性部分可界定第一纵轴,且所述臂手柄可界定第四纵轴。所述第一纵轴与所述第四纵轴可为非平行。在一些变动中,所述第一纵轴与所述第四纵轴之间的第三角可高达约75度。在一些变动中,所述第三角可在约15度与约60度之间。在一些变动中,所述臂可包括凸形状。在一些变动中,所述臂的远端部分可次于所述臂的近端部分。在一些变动中,所述臂可包括经配置以将所述机器人电耦接到所述末端执行器的一或多个引线。在一些变动中,所述臂可包括臂手柄,且所述引线平行于所述臂手柄延伸。
6、在一些变动中,所述壳体释放机构可耦接到所述臂的远端部分及所述壳体的近端部分。在一些变动中,所述壳体释放机构可包括耦接到所述臂的第一部分及耦接到所述壳体的第二部分。在一些变动中,所述壳体释放机构可包括经配置以将所述壳体释放机构的第一部分及第二部分彼此接合的壳体接合特征。在一些变动中,所述壳体接合特征可包括所述第一部分的第一壳体接合特征及所述第二部分的第二壳体接合特征。在一些变动中,所述第一壳体接合特征可包括圆角突部,且所述第二壳体接合特征可包括第一凹部。在一些变动中,所述壳体释放机构可包括经配置以抑制所述第一部分相对于所述第二部分旋转的旋转对准特征。在一些变动中,所述旋转对准特征可包括所述第一部分的第一旋转对准特征及所述第二部分的第二旋转对准特征。在一些变动中,所述第一旋转对准特征可包括成形突部,且所述第二旋转对准特征可包括第二凹部。在一些变动中,所述壳体释放机构可包括经配置以将所述壳体从所述臂释放的开关。在一些变动中,所述第一部分及所述第二部分中的一者可包括经配置以将所述第一部分从所述第二部分释放的开关。在一些变动中,所述开关可经配置以将所述第一壳体接合特征从所述第二壳体接合特征释放。在一些变动中,所述开关可包括经配置以接合所述第一壳体接合特征以机械地将所述第一部分耦接到所述第二部分的弹簧。在一些变动中,所述壳体接合特征可包括磁体、鸠尾接合部及活动铰链中的一或多者。在一些变动中,所述壳体释放机构可优于收纳于所述壳体中的所述末端执行器。在一些变动中,所述壳体释放机构可次于所述磁性部分且在所述磁性部分远端。
7、在一些变动中,所述壳体可经配置以可释放地耦接到所述末端执行器。在一些变动中,所述壳体的远端部分可经配置以收纳所述末端执行器。在一些变动中,所述壳体的近端部分可耦接到所述壳体释放机构的横向侧壁。在一些变动中,所述壳体可包括壳体手柄。在一些变动中,所述壳体手柄可经配置以由操作者的第一只手固持。在一些变动中,所述壳体手柄可优于收纳于所述壳体中的所述末端执行器。在一些变动中,所述末端执行器可收纳于所述壳体手柄的横向侧上。在一些变动中,所述壳体释放机构可经配置以由所述第一只手致动,同时用所述第一只手固持所述壳体手柄。在一些变动中,所述壳体手柄可界定手柄纵轴及手柄横轴。所述壳体可包括沿着所述手柄纵轴的第一刚度及沿着所述手柄横轴的第二刚度,所述第一刚度大于所述第二刚度。在一些变动中,所述壳体手柄可具有小于所述壳体的长度或高度的宽度。在一些变动中,所述壳体可界定经配置用于接近所述末端执行器的孔隙。
8、在一些变动中,所述机器人可包括经配置以可移动地悬挂所述末端执行器连接器及所述末端执行器中的一或多者的支撑臂。在一些变动中,所述支撑臂可包括通过经配置以提供单个自由度的一或多个接合部耦接的一或多个区段。在一些变动中,所述支撑臂可包括经配置以平移及/或旋转所述一或多个接合部的一或多个电动机。在一些变动中,所述支撑臂可包括六个或更多个自由度。在一些变动中,所述支撑臂可包括少于六个自由度。在一些变动中,所述支撑臂可包括铰接式机器人臂、scara机器人臂及线性机器人臂中的一或多者。在一些变动中,所述支撑臂可安装到包括医疗推车、患者平台、家具、墙壁、天花板及地面中的一或多者的底座。在一些变动中,所述支撑臂可包括耦接到所述支撑臂的远端部分的磁性耦接器。
9、在一些变动中,磁性耦接器可耦接到所述机器人的远端。所述磁性耦接器可能可释放地耦接到所述臂的所述磁性部分,在其间安置有无菌罩布。在一些变动中,所述末端执行器可包括可视化装置、抓钳、牵开器、磁性定位装置、传感器、腔内装置、递送装置、取回装置、吻合器、施夹器及电灼钩中的一或多者。在一些变动中,所述末端执行器可包括磁性部分。
10、在一些变动中,传感器可经配置以检测患者体表的位置的传感器。在一些变动中,所述传感器可包括力传感器、接近度传感器、光学传感器、运动传感器、加速度计、陀螺仪、激光测距仪、雷达及lidar中的一或多者。
11、在一些变动中,机器人手术系统可包括所述末端执行器连接器。在一些变动中,所述机器人的底座耦接到患者平台的横向侧。
12、本文还描述一种执行磁性腹腔镜机器人手术的方法,其包括:使用末端执行器连接器在无菌区内将末端执行器磁耦接到支撑臂;在患者的体腔内控制所述末端执行器;及使用所述末端执行器连接器在所述无菌区内将所述末端执行器与所述支撑臂解耦。所述耦接、控制及解耦全都能够由单个操作者执行。
13、在一些变动中,耦接及解耦所述末端执行器能够由所述单个操作者的双手执行。在一些变动中,控制所述末端执行器能够由所述单个操作者的单手执行。在一些变动中,耦接及解耦所述末端执行器维持所述无菌区。在一些变动中,所述无菌区可在所述耦接、控制及解耦步骤期间被维持。
14、本文还描述一种将末端执行器与机器人手术系统解耦的方法,其包括:提供耦接于所述末端执行器、无菌罩布与支撑臂之间的末端执行器连接器。所述末端执行器连接器可包括臂及包括手柄的壳体。所述方法可包含固持所述壳体的所述手柄及手动地将所述壳体从所述臂释放。
15、在一些变动中,固持所述手柄及手动地释放所述壳体可由单手同时执行。在一些变动中,所述方法可包含在将所述壳体从所述臂释放之后在远离患者的方向上撤回所述手柄。在一些变动中,所述臂可包括磁耦接到所述支撑臂的磁性部分。
16、本文还描述一种将末端执行器耦接到支撑臂的方法,其包括:提供包括壳体及经配置以可释放地耦接到所述壳体的臂的末端执行器连接器;将所述臂磁耦接到所述支撑臂,在其间安置有无菌罩布;将所述末端执行器耦接到所述壳体;及将所述壳体耦接到所述支撑臂。在一些变动中,将所述壳体耦接到所述臂可由单手执行。
17、本文还描述一种控制支撑臂的方法,其包括:基于操作者的单脚的运动接收支撑臂控制信号;及基于所述接收到的支撑臂控制信号以至少三个自由度控制支撑臂的运动。
18、在一些变动中,所述支撑臂控制信号可包括所述支撑臂的对应于所述单脚的平移运动的平移运动。在一些变动中,所述支撑臂控制信号可包括所述支撑臂的对应于所述单脚的横向运动或偏航运动的横向运动。在一些变动中,所述支撑臂控制信号可包括所述支撑臂的对应于所述单脚的屈曲运动的向下运动。在一些变动中,所述支撑臂控制信号可包括对应于所述单脚的脚跟移动的支撑臂切换命令。在一些变动中,所述方法可包括基于所述单脚的运动接收末端执行器控制信号。
19、在一些变动中,所述方法可包括基于所述末端执行器控制信号控制末端执行器的操作。在一些变动中,所述操作者可在所述单脚的所述运动期间是站立的。
20、本文还描述一种支撑臂控制器,其包括:底座,其包括第一端及第二端,所述底座经配置以收纳操作者的中足。一组前足开关可耦接到所述底座的所述第一端。一组后足开关可耦接到所述底座的所述第二端。所述一组前足开关及所述一组后足开关可经配置以产生支撑臂控制信号。
21、在一些变动中,所述支撑臂控制信号可经配置以控制所述支撑臂的运动,且操作者足部的运动可对应于所述支撑臂的所述运动。在一些变动中,所述一组前足开关可包括经配置以接收所述足部的向前运动并产生对应于所述支撑臂的向前运动的所述支撑臂控制信号的第一开关。
22、在一些变动中,所述一组前足开关可包括经配置以接收所述足部的伸展运动并产生对应于所述支撑臂的向下运动的所述支撑臂控制信号的第二开关。在一些变动中,所述一组前足开关可包括经配置以接收所述足部的向左运动并产生对应于所述支撑臂的向左运动的所述支撑臂控制信号的第三开关。在一些变动中,所述一组前足开关可包括经配置以接收所述足部的向右运动并产生对应于所述支撑臂的向右运动的所述支撑臂控制信号的第四开关。在一些变动中,所述一组前足开关可包括经配置以接收所述足部的屈曲运动并产生对应于所述支撑臂的向上运动的所述支撑臂控制信号的第五开关。在一些变动中,所述一组前足开关可包括经配置以接收所述足部的向后运动并产生对应于所述支撑臂的向后运动的所述支撑臂控制信号的第六开关。在一些变动中,所述一组前足开关可包括经配置以接收后足的向下运动并产生机器人手术系统的装置切换信号的第七开关。在一些变动中,所述一组前足开关及所述一组后足开关可包括机械开关、光学传感器、陀螺仪、运动传感器、压力传感器及磁性传感器中的一或多者。在一些变动中,所述底座可相对于所述一组前足开关中的一或多者及所述后足开关中的一或多者被抬高。
23、本文还描述一种配准末端执行器的方法,其包括:将所述末端执行器耦接到接近于患者的机器人手术系统的支撑臂。所述末端执行器可包括第一配准点,且所述患者可包括第二配准点。可将所述第一配准点对准到所述第二配准点。可配准对准到所述第二配准点的所述第一配准点的位置。所述第一配准点的所述位置可被配准于所述机器人手术系统的三维坐标系中。可基于所述经配准第一配准点控制所述支撑臂。
24、在一些变动中,所述第二配准点可对应于所述患者的接近部位。在一些变动中,所述第二配准点可对应于耦接到所述患者的套管针的入口。在一些变动中,所述第一配准点可与所述末端执行器的纵轴相交。在一些变动中,可产生所述第一配准点的视觉指示符。在一些变动中,所述视觉指示符可包括引导于所述末端执行器处的照明。在一些变动中,将所述第一配准点对准到所述第二配准点可包括使所述第一配准点重叠到所述第二配准点。
25、在一些变动中,所述经配准第一配准点可包括枢转点。在一些变动中,控制所述支撑臂可包括使所述末端执行器在包括所述枢转点处的顶点的圆锥形运动范围内进行俯仰、偏航及横摇中的一或多者。在一些变动中,所述圆锥形运动范围可具有高达约50度的最大圆锥角θ。在一些变动中,所述圆锥形运动范围可由α2+β2≤θ2表示,其中α对应于所述末端执行器的俯仰角,β对应于所述末端执行器的偏航角,且θ对应于最大圆锥角。在一些变动中,控制所述支撑臂可包括维持所述末端执行器与所述枢转点的相交点。在一些变动中,所述第二配准点可对应于所述患者的腹壁的肌层。在一些变动中,当出现以下情况中的一或多者时可将所述第一配准点重配准到所述第二配准点:所述患者相对于患者平台移动、所述患者平台移动、支撑臂的底座被移动及所述枢转点被移动。在一些变动中,对准由操作者手动地执行。
26、本文还描述一种控制末端执行器的方法,其可包括:测量由患者施加于耦接到支撑臂的末端执行器的力;及响应于所述经测量力超过预定阈值而相对于所述患者移动所述末端执行器。
27、在一些变动中,所述方法可包括响应于所述经测量力超过所述预定阈值而输出通知。在一些变动中,所述方法可包括相对于所述患者移动所述末端执行器,包括将所述末端执行器从所述患者移开。在一些变动中,所述方法可包括相对于所述患者移动所述末端执行器,包括移动耦接到所述末端执行器的所述支撑臂。在一些变动中,所述方法可包括响应于所述经测量力超过所述预定阈值而控制患者平台。
28、在一些变动中,所述方法可包括控制所述患者平台,包括将所述患者平台从所述末端执行器移开。在一些变动中,所述方法可包括响应于所述经测量力超过所述预定阈值而抑制操作者对一或多个所述支撑臂及患者平台的控制。在一些变动中,所述末端执行器可包括经配置以控制安置于所述患者体内的腔内装置的磁性定位装置。
29、本文还描述一种控制末端执行器的方法,其包括:确定患者与耦接到支撑臂的末端执行器之间的距离;及基于所述经确定距离相对于所述患者移动所述末端执行器以维持所述患者与所述末端执行器之间的预定距离。
30、在一些变动中,所述距离可使用光学传感器、耦接到所述患者的患者基准点及耦接到所述末端执行器的末端执行器基准点中的一或多者来确定。在一些变动中,相对于所述患者移动所述末端执行器可包括维持所述末端执行器与所述患者之间的至少一预定距离。
31、本文还描述一种确认末端执行器解耦的方法,其包括:使用力传感器测量施加于支撑臂的第一力;及基于所述经测量力超过第一预定阈值确定末端执行器移除;将所述支撑臂从末端执行器配准点移开,同时测量施加于所述支撑臂的第二力;及基于所述经测量第二力确认末端执行器解耦。
32、在一些变动中,所述方法可包括输出将所述支撑臂从配准点移开的提示。在一些变动中,其中所述第二力可能基本上没有力。在一些变动中,所述方法可包括确认末端执行器耦接包括产生末端执行器解耦信号。在一些变动中,移动所述支撑臂可包括相对于所述配准点的横向移动及相对于所述配准点的旋转中的一或多者。在一些变动中,如果所述经测量第二力超过第二预定阈值,那么可抑制移动所述支撑臂。在一些变动中,所述方法可包括基于所述经测量第二力超过第二预定阈值确认末端执行器耦接。
- 还没有人留言评论。精彩留言会获得点赞!