本发明涉及体质测试,具体为一种基于计算机视觉的坐位体前屈测量方法及装置。
背景技术:
1、坐位体前屈领域目前有两种方案:传统的坐位体前屈测试仪和电子坐位体前屈仪,其中传统的坐位体前屈测试仪标尺显示的成绩需要人工记录,不能自动记录;另一种电子坐位体前屈仪一般通过在设备上集成超声波测距传感器或是类似电子游标卡尺使用电容型传感器来实现。
2、现有技术中,如中国专利号为:cn112914563a的“一种智能坐位体前屈测试器”,其采用在坐位体前屈的底部位置安装超声波传感器来自动获取测试成绩。该方案存在两个明显的缺点:1.超声波测量距离并不是一个点测量,超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪形衰减,左右约30°的扩散角。这会导致其测试的结果受到定位板背面结构的影响较大而无法准确获取定位板中心点到传感器的距离。另外坐位体前屈仪的卡尺和定位板部分有比较大的间隙,测试过程中这种定位板的松动会导致超声波测距仪无法准确地测得定位板中心点到传感器的距离。2.其固定式的结构无法适配传统的测量仪使其具备自动获取成绩的能力。
3、如ep0980506b1中提出“一种基于电容型传感器的电子游标卡尺”,用对在游标卡尺的主尺杆上的电极栅与置于相对的游标卡的电极栅间所产生的电容的变化的测量来提供一个由游标在主尺上的位置所决定的示数。或专利号为:cn1254412a的“高精度便携电子游标卡尺”中提出一种线性尺寸测量的高精度便携游标卡尺,其使用磁致电阻电极传感器。目前市场上大部分电子坐位体前屈仪均采用此方案。该方案存在两个明显的缺点:1.只能获取刻度信息,无法检测快速推动手推板作弊。2.需要特定的设备,无法对传统的测量仪进行后装改造。
4、所以我们提出了一种基于计算机视觉的坐位体前屈测量方法及装置,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的是针对现有的问题,提供了一种基于计算机视觉的坐位体前屈测量方法及装置,其可以实现自动获取测试的成绩,并检测快速推动手推板作弊的行为,并对定位板的松动具备良好的鲁棒性,且可以很方便的对传统的坐位体前屈测试仪进行自动化改造。
2、本发明是通过以下技术方案实现的:
3、一种基于计算机视觉的坐位体前屈测量方法,包括以下步骤:
4、s1、在坐位体前屈仪的底部和定位板两侧,一侧安装相机,另外一侧安装一个视觉标志物;
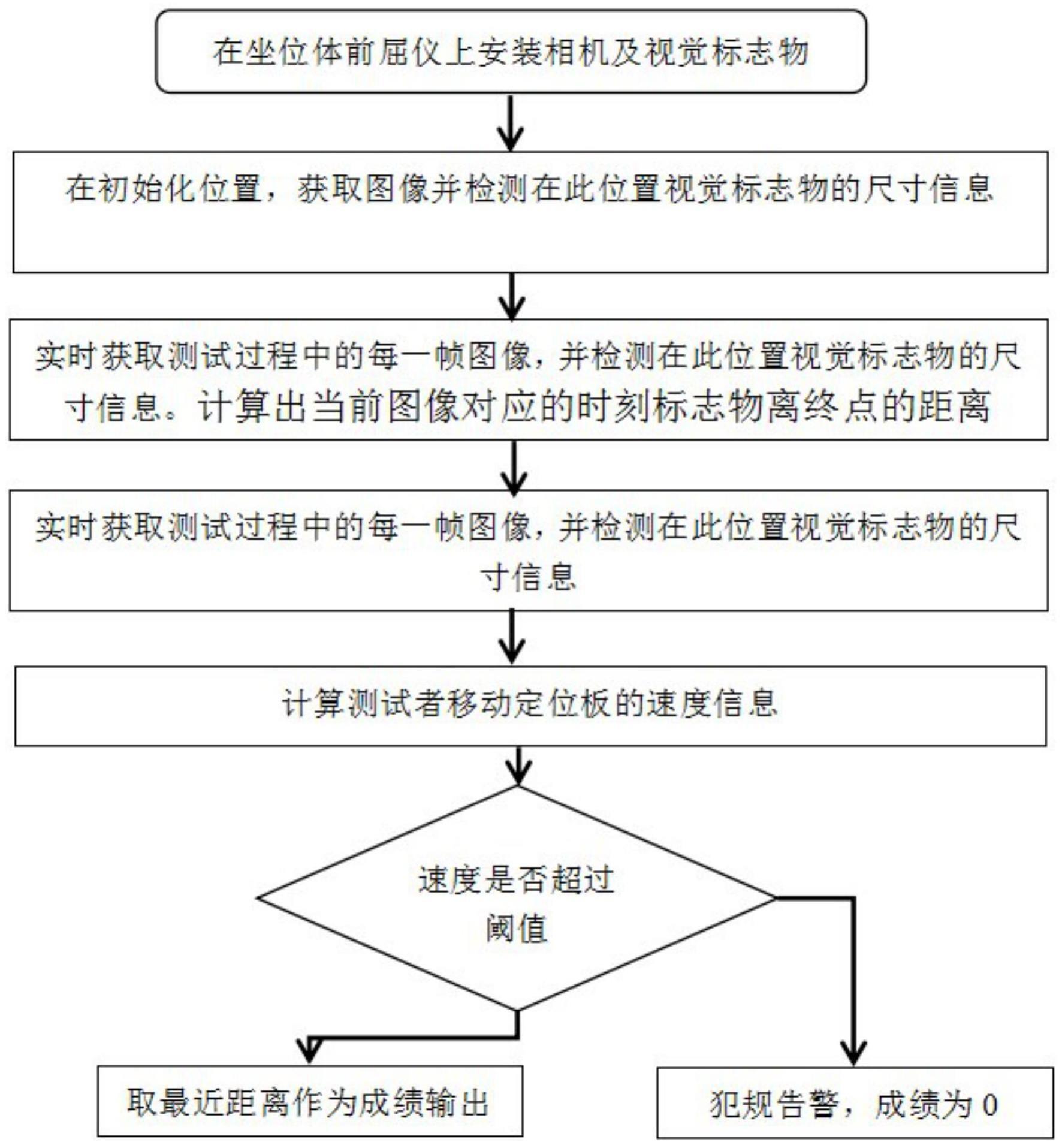
5、s2、在所述坐位体前屈仪初始化的位置,获取当前所述相机的图像,并检测出在此位置时所述视觉标志物在图像中的尺寸信息;
6、s3、实时获取测试过程中的每一帧图像,并检测出在此位置时所述视觉标志物在图像中的尺寸信息,计算出当前图像对应的时刻标志物离终点的距离;
7、s4、对步骤s3中得到的结果,计算测试者移动定位板的速度信息;若超出设定阈值则输出告警信号;
8、s5、对步骤s3中的结果进行分析,取所述视觉标志物在图像中最大尺寸的位置,记为最近距离,计算出测试者的最终成绩。
9、进一步地,在步骤s1中,所述相机和视觉标志物的安装位置可互换。
10、进一步地,在步骤s2中,所述视觉标志物为矩形硬质材料、圆形硬质材料、三角形硬质材料中的一种。
11、进一步地,所述视觉标志物为矩形硬质材料时,获取初始化位置时相机图像imageinit;典型的采用霍夫直线变换来检测图像imageinit
12、中的直线段的集合linei,此处i的取值为1-n,n为检测到的直线段的数量;
13、采用矩形的两两相交及两两平行的原理找出属于矩形的四条边linej
14、,此处j的取值为1-4,对应矩形的4条边;任取横向或纵向的一边的边长作为该视觉标志物在图像中的尺寸信息linit;
15、所述视觉标志物为圆形硬质材料时,获取初始化位置时相机图像imageinit;典型的采用霍夫圆变换来检测图像imageinit中的圆的集合circlei,此处i的取值为1-n,n为检测到的圆的数量,每个圆包括圆心(x,y),半径r);取最大圆的直径作为该视觉标志物在图像中的尺寸信息linit;
16、所述视觉标志物为三角形硬质材料时,获取初始化位置时相机图像imageinit;典型的采用霍夫直线变换来检测图像imageinit中的直线段的集合linei,此处i的取值为1-n,n为检测到的直线段的数量;
17、采用三角形的两两相交的原理找出属于三角形的三条边linej
18、,此处j的取值为1-3,对应三角形的3条边;任取一边的边长作为该视觉标志物在图像中的尺寸信息linit;
19、在初始化时,所述视觉标志物离终点的距离已知,为所述坐位体前屈仪的量程dinit。
20、进一步地,在步骤s3中,计算当前图像imagecurrent
21、中对应的该视觉标志物在当前图像中的尺寸信息lcurrent;
22、根据该视觉标志物在初始化位置时的尺寸信息linit
23、及初始化的时候标志物离终点的距离dinit
24、,结合视觉标志物在当前图像中的尺寸信息lcurrent
25、计算当前图像对应的时刻标志物离终点的距离dcurrent
26、,具体计算公式推导如下:
27、在图像坐标系下有:
28、
29、其中,(x,y)为图像坐标下任意一点的坐标,(xc,yc,zc
30、)为该点在当前相机坐标系下的坐标;
31、在初始化位置处,构成图像标志物尺寸的两点间在图像坐标系下的距离公式为:
32、
33、其中,(x1,y1),(x2,y2
34、)为标志物在初始化位置图像坐标系下的构成图像标志物尺寸的两边界点;
35、在当前位置处,构成图像标志物尺寸的两点间在图像坐标系下的距离公式为:
36、
37、其中,(x3,y3),(x4,y4
38、)为标志物在当前位置图像坐标系下的构成图像标志物尺寸的两边界点。
39、进一步地,所有的图像标志物均为平面标志物,且垂直于定位板的行进方向,故而有:
40、zc2=zc1=dinit (4)
41、zc3=zc4=dcurrent (5)
42、根据公式(1),将其代入到公式(2)及(3)中,结合公式(4)和(5)有:
43、
44、
45、由于标志物在两处相机坐标系下其实际物理尺寸是相等的,故而有:
46、(xc2-xc1)2+(yc2-yc1)2+(zc2-zc1)2=(xc3-xc4)2+(yc3-yc4)2+(zc3-zc4)2 (8)
47、结合公式(4)和(5)有
48、(xc2-xc1)2+(yc2-yc1)2=(xc3-xc4)2+(yc3-yc4)2 (9)
49、结合公式(9)及公式(6)和(7)有:
50、dinit*linit=dcurrent*lcurrent (10)
51、故而有:
52、
53、此处,根据公式(11)即可计算出当前图像对应的时刻标志物离终点的距离dcurrent。
54、进一步地,由公式(11)可知,测量结果只与初始和当前时刻下标志物在图像中的尺寸以及初始时刻的已知距离相关。
55、进一步地,在步骤s4中,计算当前时刻图像对应的时刻标志物离终点的距离与前一时刻图像对应的时刻标志物离终点的距离的差值dist,单位为m;
56、其中,所述相机的帧率为k,则前后两帧图像的时间间隔为1/ks;测试者移动定位板的速度信息scurrent计算公式如下:
57、
58、其中,设定的速度阈值为p,p一般按照实际情况灵活设定,典型值设置为1m/s,当测试者移动定位板的速度信息scurrent时输出告警信号。
59、进一步地,坐位体前屈测试仪的标准量程一般为-20~35cm,-20cm处对应为初始化起点位置,35cm处对应为终点的位置;测试者的最终成绩score的计算方式为:
60、score=35-dcurrent(13)。
61、一种基于计算机视觉的坐位体前屈测量装置,包括坐位体前屈测量仪主体(1)、相机模块(2)、视觉标志物模块(3)、计算模块(4)和电源模块(5);
62、所述相机模块(2)用于捕捉含有所述视觉标志物模块(3)的图像,并通过数据线传输给所述计算模块(4);所述数据线为网线或usb线;
63、所述视觉标志物模块(3)为平面的矩形/圆形/三角形的硬质材料,其颜色无要求;
64、所述计算模块(4)用于获取所述相机模块(2)通过所述数据线获取来的含有所述视觉标志物模块(3)信息的图像,并通过计算得到测试者的成绩以及犯规告警信息,并输出至屏幕显示/语音播报/云端平台中的一种或多种组合;
65、所述电源模块(5)用于为所述计算模块(4)和相机模块(2)提供电源。
66、与现有技术相比,本发明的有益效果是:
67、本发明使用普通rgb相机配合基于计算机视觉算法,快速获取坐位体前屈测试中的成绩,主要实现了可便捷地对传统的坐位体前屈测试仪进行自动化改造,适配现有的所有坐位体前屈测量仪,使传统的测量仪具备自动获取成绩的功能,并且解决了坐位体前屈测试中快速推动手推板作弊的问题,同时避免了因定位板松动而影响测量准确度的问题。