目标对象点云数据生成方法、装置、雷达设备与流程
本技术涉及雷达检测,特别是涉及一种目标对象点云数据生成方法、装置、雷达设备、存储介质和计算机程序产品。
背景技术:
1、雷达的应用很广泛,生物姿态检测是其应用之一,通过雷达对生物的回波的收集,然后对收集的回波信号进行分析,可以得到生物的点云,从而根据生物的各个关键检测点的位置变化,判断生物是否处于某种姿态。以人体为例,通过雷达对人体的回波的收集,然后对收集的回波信号进行分析,可以得到人体的点云,从而根据人体的高度变化,判断人体是否跌倒。
2、相关技术中,获取的生物点云数据的数量较为单一,导致在判断生物姿态时,检测结果的准确率较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高生物姿态检测准确率的目标对象点云数据生成方法、装置、雷达设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种目标对象点云数据生成方法。所述方法包括:
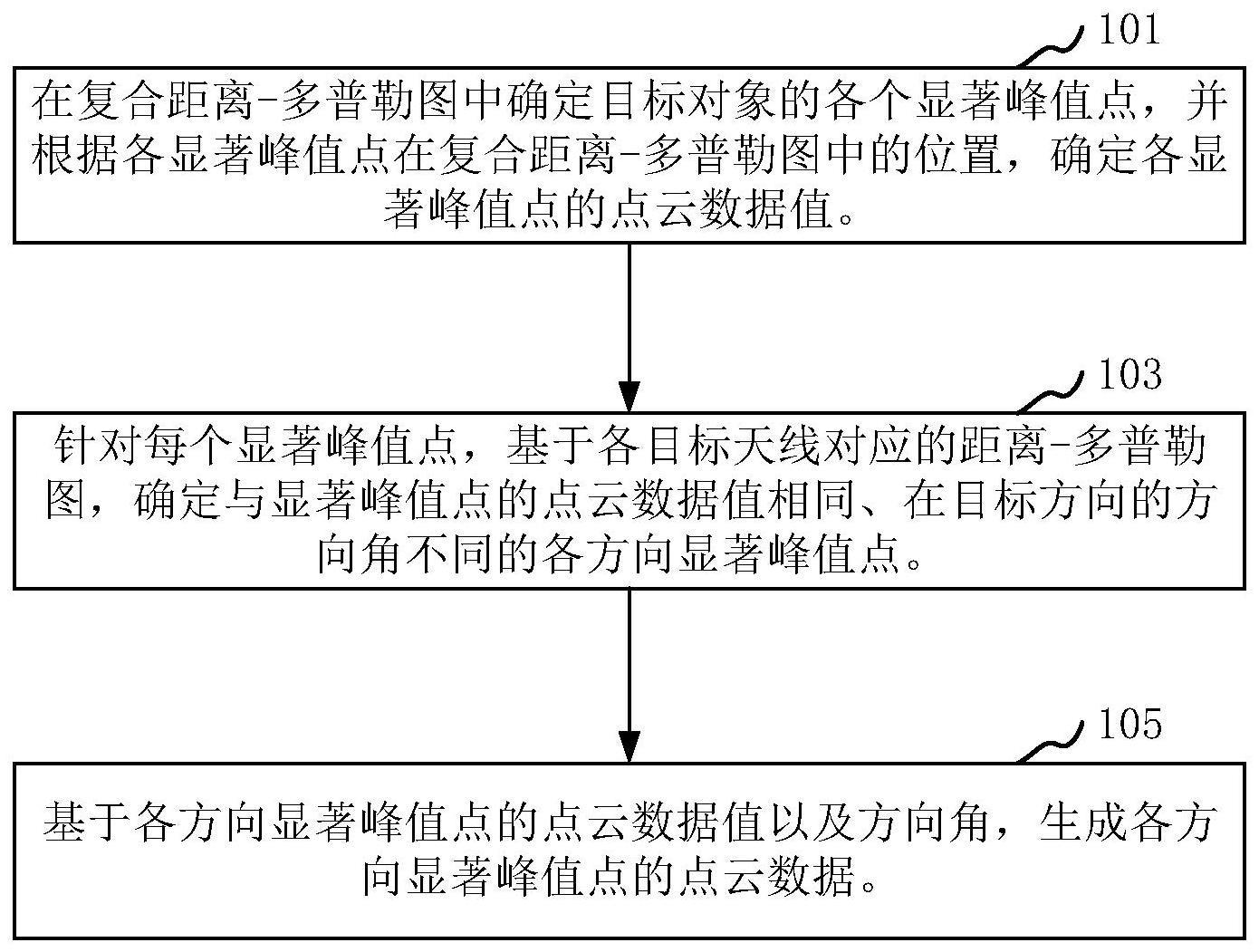
3、在复合距离-多普勒图中确定目标对象的各个显著峰值点,并根据各所述显著峰值点在所述复合距离-多普勒图中的位置,确定各所述显著峰值点的点云数据值;所述复合距离-多普勒图由多个接收天线对应的距离-多普勒图求和得到,所述接收天线至少包括两个不同方向的多个接收天线;
4、针对每个所述显著峰值点,基于各目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在目标方向的方向角不同的各方向显著峰值点;所述目标天线为目标方向对应的各接收天线;
5、基于各所述方向显著峰值点的点云数据值以及方向角,生成各所述方向显著峰值点的点云数据。
6、在其中一个实施例中,所述针对每个所述显著峰值点,基于各所述目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在所述目标方向的方向角不同的各方向显著峰值点,包括:
7、针对每个所述显著峰值点,基于所述显著峰值点在所述复合距离-多普勒图中的位置索引,在所述目标天线对应的距离-多普勒图中,查询所述显著峰值点在各所述距离-多普勒图的功率值;
8、对各所述功率值进行快速傅里叶变换,得到所述显著峰值点在所述目标方向的功率分布谱;
9、在所述功率分布谱中的各个峰值点中,将符合要求的峰值点作为所述目标方向上的方向显著峰值点。
10、在其中一个实施例中,所述在所述功率分布谱中的各个峰值点中,将符合预设峰值条件的峰值点作为方向显著峰值点,包括:
11、在所述功率分布谱的各个峰值点中,确定最大峰值点;
12、根据所述最大峰值点对应的功率值,确定所述显著峰值点对应的门限功率值;
13、基于所述门限功率值,在所述功率分布谱的各个峰值点中,确定符合预设峰值条件的峰值点作为方向显著峰值点。
14、在其中一个实施例中,所述基于所述门限功率值,在所述功率分布谱的各个峰值点中,确定符合预设峰值条件的峰值点作为方向显著峰值点,包括:
15、在所述功率分布谱的各个峰值点中,查找所述目标方向上功率值高于所述门限功率值的峰值点,并将功率值高于所述门限功率值的峰值点作为方向显著峰值点。
16、在其中一个实施例中,所述基于所述门限功率值,在所述功率分布谱的各个峰值点中,确定符合预设峰值条件的峰值点作为方向显著峰值点,包括:
17、在所述功率分布谱中,遍历各个峰值点对应的功率值,直至遍历完所有峰值点或方向显著峰值点数量高于预设数量阈值;
18、针对每个所述峰值点,在所述峰值点的功率值高于所述门限功率值的情况下,将所述峰值点作为方向显著峰值点,并将所述方向显著峰值点数量加一。
19、在其中一个实施例中,所述接收天线包括水平接收天线和垂直接收天线;在所述目标方向为垂直方向的情况下,所述目标天线为所述垂直接收天线;所述方向角为俯仰角;所述方法还包括:
20、针对每个所述显著峰值点,基于各所述水平接收天线对应的距离-多普勒图,确定所述显著峰值点对应的方位角,将所述方位角作为所述显著峰值点对应的点云数据值;
21、所述针对每个所述显著峰值点,基于各所述目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在所述目标方向的方向角不同的各方向显著峰值点,包括:
22、针对每个所述显著峰值点,基于各所述垂直接收天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在所述垂直方向的俯仰角不同的各方向显著峰值点。
23、在其中一个实施例中,所述接收天线包括水平接收天线和垂直接收天线;在所述目标方向为水平方向的情况下;所述目标天线为所述水平接收天线;所述水平方向为方位角;所述方法还包括:
24、针对每个所述显著峰值点,基于各所述垂直接收天线对应的距离-多普勒图,确定所述显著峰值点对应的俯仰角,将所述俯仰角作为所述显著峰值点对应的点云数据值;
25、所述针对每个所述显著峰值点,基于各所述目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在所述目标方向的方向角不同的各方向显著峰值点,包括:
26、针对每个所述显著峰值点,基于各所述水平接收天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在所述水平方向的方位角不同的各方向显著峰值点。
27、第二方面,本技术还提供了一种目标对象点云数据生成装置。所述装置包括:
28、显著峰值点确定模块,用于在复合距离-多普勒图中确定目标对象的各个显著峰值点,并根据各所述显著峰值点在所述复合距离-多普勒图中的位置,确定各所述显著峰值点的点云数据值;所述复合距离-多普勒图由多个接收天线对应的距离-多普勒图求和得到,所述接收天线至少包括两个不同方向的多个接收天线;
29、方向显著峰值点确定模块,用于针对每个所述显著峰值点,基于各目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在目标方向的方向角不同的各方向显著峰值点;所述目标天线为目标方向对应的各接收天线;
30、生成模块,用于基于各所述方向显著峰值点的点云数据值以及方向角,生成各所述方向显著峰值点的点云数据。
31、第三方面,本技术还提供了一种雷达设备。所述雷达设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
32、在复合距离-多普勒图中确定目标对象的各个显著峰值点,并根据各所述显著峰值点在所述复合距离-多普勒图中的位置,确定各所述显著峰值点的点云数据值;所述复合距离-多普勒图由多个接收天线对应的距离-多普勒图求和得到,所述接收天线至少包括两个不同方向的多个接收天线;
33、针对每个所述显著峰值点,基于各目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在目标方向的方向角不同的各方向显著峰值点;所述目标天线为目标方向对应的各接收天线;
34、基于各所述方向显著峰值点的点云数据值以及方向角,生成各所述方向显著峰值点的点云数据。
35、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、在复合距离-多普勒图中确定目标对象的各个显著峰值点,并根据各所述显著峰值点在所述复合距离-多普勒图中的位置,确定各所述显著峰值点的点云数据值;所述复合距离-多普勒图由多个接收天线对应的距离-多普勒图求和得到,所述接收天线至少包括两个不同方向的多个接收天线;
37、针对每个所述显著峰值点,基于各目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在目标方向的方向角不同的各方向显著峰值点;所述目标天线为目标方向对应的各接收天线;
38、基于各所述方向显著峰值点的点云数据值以及方向角,生成各所述方向显著峰值点的点云数据。
39、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
40、在复合距离-多普勒图中确定目标对象的各个显著峰值点,并根据各所述显著峰值点在所述复合距离-多普勒图中的位置,确定各所述显著峰值点的点云数据值;所述复合距离-多普勒图由多个接收天线对应的距离-多普勒图求和得到,所述接收天线至少包括两个不同方向的多个接收天线;
41、针对每个所述显著峰值点,基于各目标天线对应的距离-多普勒图,确定与所述显著峰值点的点云数据值相同、在目标方向的方向角不同的各方向显著峰值点;所述目标天线为目标方向对应的各接收天线;
42、基于各所述方向显著峰值点的点云数据值以及方向角,生成各所述方向显著峰值点的点云数据。
43、上述目标对象点云数据生成方法、装置、雷达设备、存储介质和计算机程序产品,通过对显著峰值点进行扩充,在目标对象特征显著的目标方向进行显著峰值点拓展,使得原本漏检的显著峰值点被检测出来,丰富了目标对象在特征显著的方向的点云数据。
- 还没有人留言评论。精彩留言会获得点赞!