超声探头、三维成像方法及装置、放疗定位追踪方法与流程
本发明属于医疗设备,具体涉及一种超声探头、三维成像方法及装置、放疗定位追踪方法。
背景技术:
1、病人在放疗开始前通过激光或ivs(imageviewingsystem,图像引导系统)进行摆位,在放疗过程中认为肿瘤是静态的、不动的。但是肺、肝等部位肿瘤会随着呼吸产生位移和形变,即使进行了精确的摆位,肿瘤也会因为呼吸运动或肠胃蠕动偏离目标位置范围达0.8~2.5cm,导致在放疗过程中射线不能全部作用在肿瘤靶区上,对周围的危机器官造成一定程度的伤害,放疗效果也会下降。
2、基于呼吸门控技术追踪动态肿瘤过程中,肺、腹部的生理病理改变和外部环境的改变如腹压增加、胃充盈、呼吸通道阻力增加均可能改变呼气后的肺容积和肝脏肿瘤位置和形态,另外呼吸用力的程度和可能存在的漏气现象、鼻夹脱落,以及患者在放疗过程中因为时间长、烦躁而产生的不自主运动等问题,均影响放疗效果。
3、超声影像和4dct(four-dimensionalcomputedtomography)的肿瘤实时追踪是一种先进的实现肿瘤精确放射治疗的手段,如果将超声影像应用于放疗过程中,则可因其无创、无辐射而进行实时跟踪,从而可以获取肿瘤的位移和形变。
4、现有的一些可用于肿瘤追踪的超声探头技术方案:
5、第一,申请号为cn201480079780.1,公开一种三维(3d)和/或四维(4d)超声成像的超声成像设备,该超声成像系统包括在同一平面中彼此成角度地偏移的换能器元件的至少第一和第二阵列。该超声换能器阵列的平移运动、旋转运动和/或摇摆运动,严重影响成像实时性与可操作性。且该方法需要附加的硬件,从而会增加成本和占用面积。
6、第二,申请号为cn202080015890.7,公开一种用于超声监测系统的用于检查弯曲物体的柔性超声换能器;申请号为cn201910696445.0,公开一种多参数高选择性cmuts气体传感器及其使用与制备方法,二维超声阵列可应用于肿瘤追踪。
7、各种二维超声阵列多应用于对实时性要求不高的疾病诊断,但在实现肿瘤追踪的实时性较差,且技术实时难度大,成像效果一般,抗干扰能力较低,在肿瘤治疗过程中容易受到治疗射线和其他电磁干扰影响成像。
8、此外,常规的一维线阵探头结构简单、成本低,但只能追踪标记物的二维变化,无法实现精准的三维追踪位移和形变信息。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种超声探头、三维成像方法及装置、放疗定位追踪方法。
2、为了达到上述目的,本发明的技术方案如下:
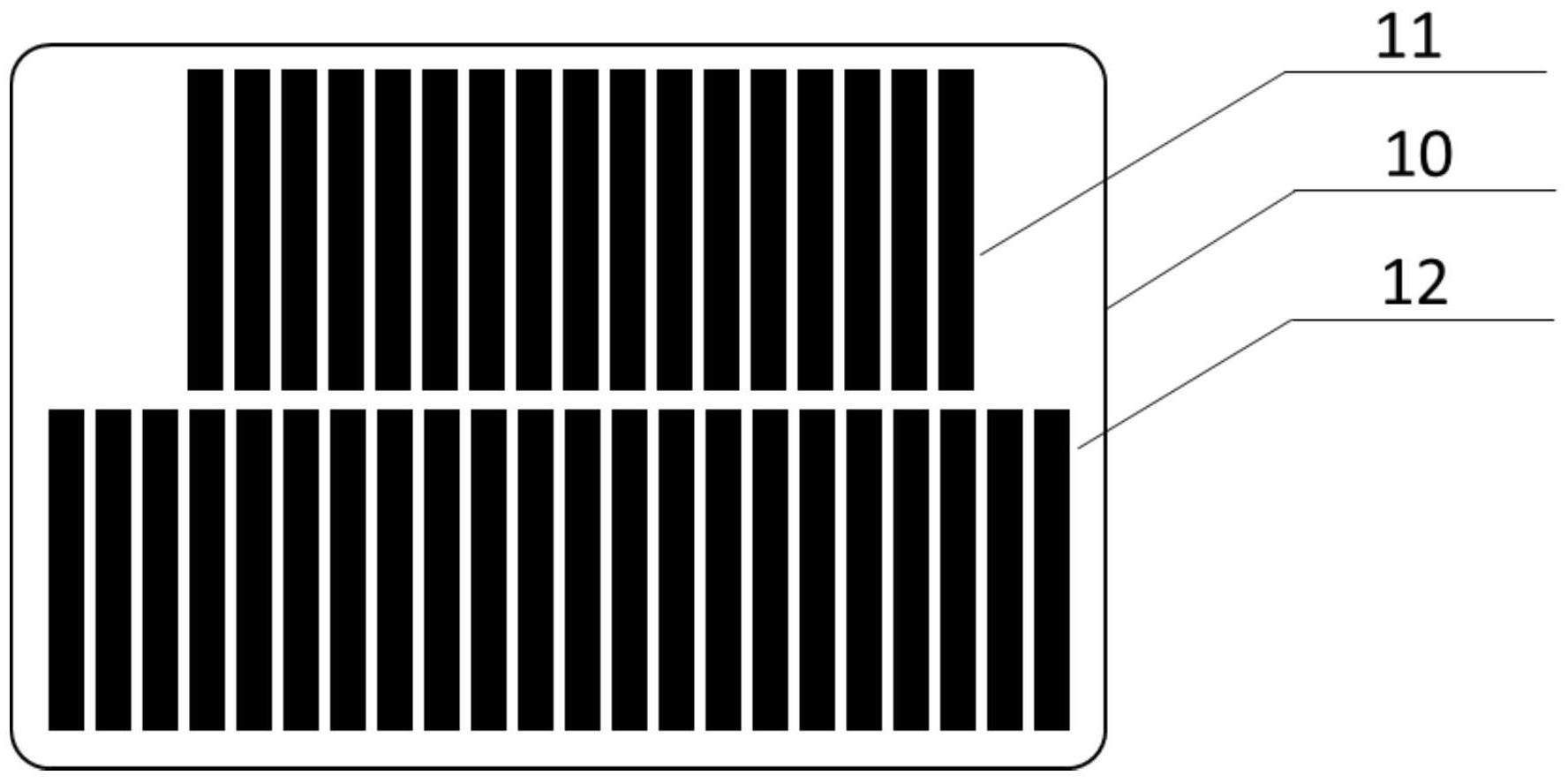
3、第一,本发明公开一种超声探头,包括:至少两组线性换能器相控阵列,每组线性换能器相控阵列包括多个线性排列的阵元;
4、每组线性换能器相控阵列均能够获取其正下方标记物标记点切面的二维超声图像。
5、在上述技术方案的基础上,还可做如下改进:
6、作为优选的方案,所有线性换能器相控阵列分布在一个同一平面内,且互不重合。
7、第二,本发明公开一种三维成像方法,包括以下步骤:
8、a1:采集标记物的3d形态模型;
9、a2:利用上述任一种超声探头获取标记物多个不同位置标记点切面的二维超声图像;
10、a3:将不同时刻超声探头获得二维超声图像中标记物的标记点位置形态信息与a1获得的标记物的3d形态模型通过匹配模型,进行多次匹配;
11、根据匹配误差,调整匹配模型的模型参数;
12、当匹配误差小于阈值,获得最终匹配模型和对应模型参数;
13、a4:将超声探头获取的标记物的实时二维超声图像经过a3得到的最终匹配模型进行处理,生成标记物的实时三维影像。
14、作为优选的方案,a2中,利用超声探头获取标记物至少三个不同位置标记点切面的二维超声图像,且所有标记点不在同一直线上。
15、作为优选的方案,a2具体包括以下步骤:
16、a2.1:利用超声探头在患者的体表移动,并实时二维成像,确认标记物的位置;
17、a2.2:将超声探头的中心对准标记物位移的轨迹中心,且超声探头所在位置能够获取标记物至少三个不同位置标记点切面的二维超声图像;
18、a2.3:将超声探头固定在患者体表的相应位置。
19、第三,本发明公开一种三维成像装置,包括:
20、上述任一种超声探头,超声探头用于获取标记物多个不同位置标记点切面的二维超声图像;
21、3d形态模型采集模块,3d形态模型采集模块用于采集标记物的3d形态模型;
22、匹配模块,匹配模块用于将不同时刻超声探头获得二维超声图像中标记物的标记点位置形态信息与3d形态模型采集模块获得的标记物的3d形态模型通过匹配模型,进行多次匹配;
23、根据匹配误差,调整匹配模型的模型参数;
24、当匹配误差小于阈值,获得最终匹配模型和对应模型参数;
25、三维影像生成模块,三维影像生成模块用于将超声探头获取的标记物的实时二维超声图像经过匹配模块得到的最终匹配模型进行处理,生成标记物的实时三维影像。
26、作为优选的方案,超声探头用于获取标记物至少三个不同位置标记点切面的二维超声图像,且所有标记点不在同一直线上。
27、第四,本发明还公开一种放疗定位追踪方法,包括以下步骤:
28、s1:放疗前,采集肿瘤及周边组织的4d影像,根据4d影像进行肿瘤的勾画,同时获取肿瘤随身体正常生理变化的第二动态曲线,获取不同生理状态下肿瘤的位置和形变数据;
29、s2:在勾画肿瘤的同时,通过4d影像寻找并确认满足要求的标记物并对其进行勾画,同时获取标记物随身体正常生理变化的第一动态曲线,获取不同生理状态下标记物的位置和形变数据;
30、s3:通过上述任一种超声探头获取标记物的二维超声图像,得到标记物实时的位置移动和姿态变化;
31、s4:根据标记物的第一动态曲线和肿瘤的第二动态曲线,在不同的正常生理变化条件下,实现标记物位置移动和姿态变化与肿瘤位置变化和形态变化之间的相互关系,获得完整的匹配模型及模型参数;
32、s5:放疗中,通过上述任一种超声探头获取标记物的二维超声图像,计算机通过映射模型将二维超声图像中的标记点位置信息实时转换成标记物的三维信息,实现标记物的定位跟踪,同时生成标记物的第三动态曲线;
33、s6:将s5得到的第三动态曲线和s2中的第一动态曲线进行生理状态确认,再通过s4中的匹配模型得到肿瘤的位置和形变;
34、s7:将s6得到的肿瘤位置及形状信息发送给放疗控制设备,控制光栅进行调整。
35、作为优选的方案,s3包括以下步骤:
36、s3.1:利用上述任一种超声探头在患者的体表移动,并实时二维成像,确认标记物的位置;
37、s3.2:将超声探头的中心对准标记物位移的轨迹中心,且超声探头所在位置能够获取标记物至少三个不同位置标记点切面的二维超声图像;
38、s3.3:将超声探头固定在患者体表的相应位置;
39、s3.4:将超声探头获得的所有标记点位置信息结合s2中勾画的标记物3d形态,获得所有标记点位置与标记物3d形态实现完全映射的映射模型及模型参数。
40、作为优选的方案,在s4和/或s6中,引入体表光学追踪方法进一步获取肿瘤的位置和形变。
41、本发明公开一种超声探头、三维成像方法及装置、放疗定位追踪方法,具有以下有益效果:
42、1)本发明公开一种具有多组线性换能器相控阵列的超声探头,能够获取标记物多个不同位置标记点切面的二维超声图像。
43、2)通过本发明公开的超声探头用二维成像时间完成标记物的三维成像,实现对标记物高实时性的动态追踪。
44、3)本发明通过拟合放疗前建立的映射模型和匹配模型,实现对肿瘤精准的实时定位和追踪,进而实现动态肿瘤的精准放疗。
45、4)本发明公开的放疗定位追踪方法简单灵活,实时性强,成本低,精度高,对病人友好,易于临床普及。
- 还没有人留言评论。精彩留言会获得点赞!