具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置的制作方法
本公开涉及医疗,尤其涉及一种具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置、方法及控制系统。
背景技术:
1、本技术是在申请人申请的名称为“具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置”专利技术上进行的技术应用。
2、在“具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置”的专利申请中,基于肿瘤组织的三维扫描数据,控制机器人带动肿瘤诊疗器械的进针方向和深度,能够实现肿瘤诊疗的自动化治疗,节省医疗人力,提高医疗时效,解决了如下问题:在肿瘤诊疗手术中,肿瘤诊疗器械上的进针,需要控制住其进针方向和深度,而现有的机器人多为半自动或者认为操控的机器,智能化成程度不高,进针方向和深度需要人为控制。不能结合肿瘤组织的三维空间数据,进行进针方向和深度的引导和控制,医疗效率低下。
3、而在实际应用过程中,申请人还发现存在如下技术问题:
4、在通过扫描系统获得肿瘤的三维深度扫描数据进行设定机器人到肿瘤组织的运动轨迹数据过程中,主要是机器人坐标参数和三维深度扫描数据之间的交互换算,并未考虑肿瘤诊疗器械的三维坐标,机器人缺乏肿瘤诊疗器械的三维坐标的位置矫正,从而可能出现:在进针方向不能持续维持在同一个平面上时,可能会因为肿瘤诊疗器械本体结构或者其安装结构,使其相对机器臂的相对位置发生坐标偏差,从而引起肿瘤诊疗器械的末端不能精准到达肿瘤组织的位置。
5、因此,需要考虑到通过肿瘤诊疗器械的三维位置反馈,来调节机器人的运动轨迹。
技术实现思路
1、为了解决上述问题,本技术提出一种具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置、控制方法及控制系统。
2、本技术一方面,提出一种具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置,包括:
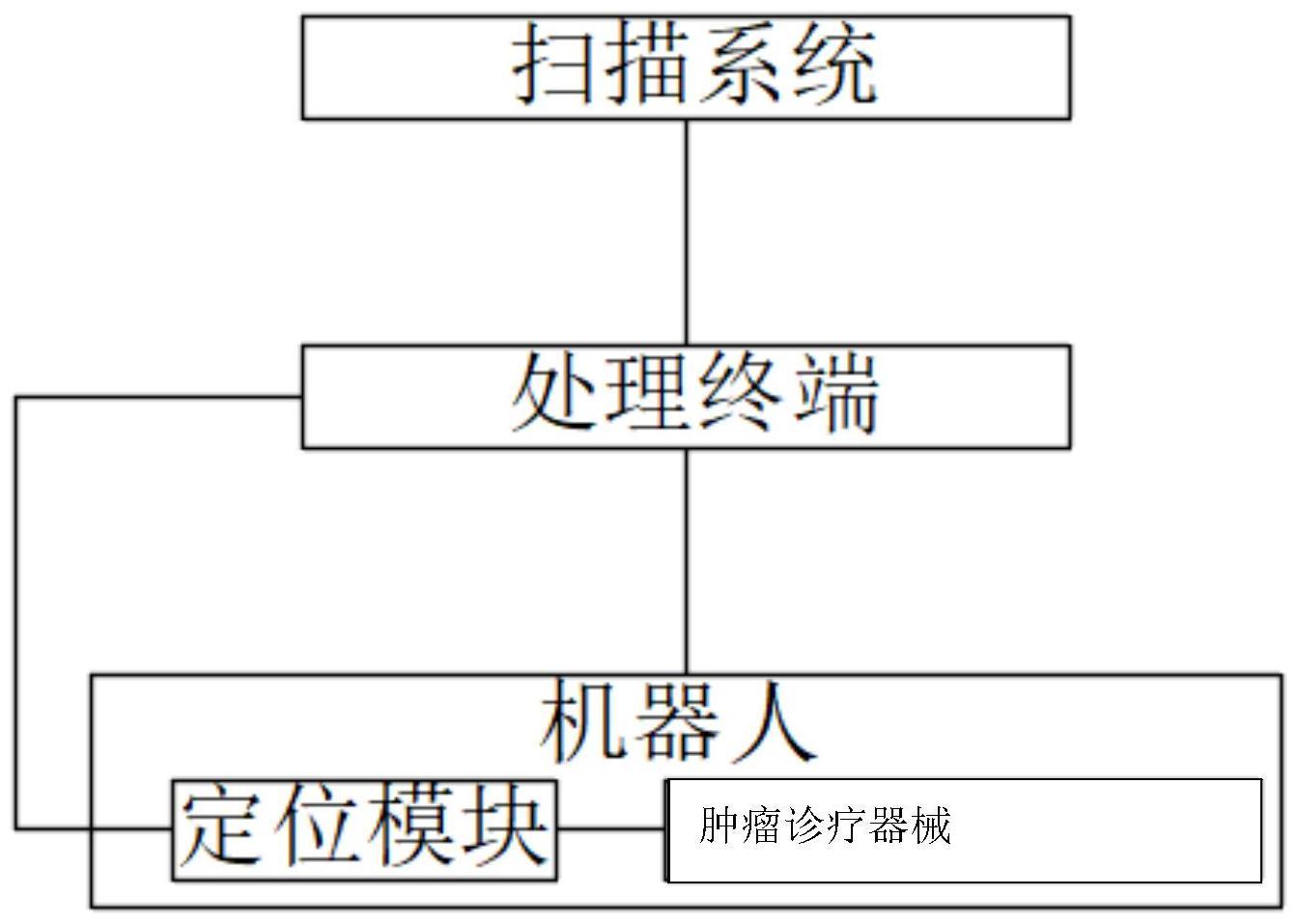
3、扫描系统,用于扫描获取并发送肿瘤组织的三维深度扫描数据;
4、处理终端,用于获取所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述肿瘤组织的进针方向和深度引导数据;所述处理终端还用于接收所述定位模块发送的三维空间坐标位置数据,通过所述三维空间坐标位置数据反馈调节所述机器人的机器人坐标,并将反馈调节的机器人坐标发送至机器人;
5、机器人,用于获取所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;
6、肿瘤诊疗器械,设于所述机器人的机器臂末端,用于在所述机器人的进针方向和深度引导下,到达所述肿瘤组织位置进行肿瘤手术;
7、定位模块,设于所述肿瘤诊疗器械上,用于获取所述肿瘤诊疗器械的实时三维空间坐标位置数据,并发送至所述处理终端。
8、作为本技术的一种可选实施方案,可选地,所述扫描系统,包括:
9、安装支架,设于所述机器人一侧;
10、扫描探头,设于所述安装支架上,且对应所述肿瘤组织所在的肿瘤体表;
11、其中,所述扫描探头的数量至少为三个,均匀分布于所述肿瘤组织所在肿瘤体表的正对面。
12、作为本技术的一种可选实施方案,可选地,所述处理终端,包括:
13、接收端,用于获取所述三维深度扫描数据;
14、解析模块,用于根据预设解析规则对所述三维深度扫描数据进行解析,获得所述肿瘤组织的三维空间坐标数据;
15、预处理模块,用于对所述三维空间坐标数据进行过滤和降噪处理,得到肿瘤三维预处理数据。
16、作为本技术的一种可选实施方案,可选地,所述处理终端,还包括:
17、机器人进针方向数据建立模块,用于根据所述肿瘤三维预处理数据,建立所述机器人到所述肿瘤组织的进针方向数据;
18、机器人进针深度数据建立模块,用于根据所述肿瘤三维预处理数据,建立所述机器人到所述肿瘤组织的进针深度数据;
19、机器人坐标处理模块,用于获取所述反馈调节的机器人坐标,并将所述反馈调节的机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换。
20、作为本技术的一种可选实施方案,可选地,所述机器人坐标处理模块,包括:
21、机器人坐标解析模块,用于根据解析规则对所述反馈调节的机器人坐标进行解析,获得所述机器人的坐标解析数据;
22、第一坐标关联模块,用于将所述坐标解析数据与所述进针方向数据进行关联转换,并保存至所述处理终端;
23、第二坐标关联模块,用于将所述坐标解析数据与所述进针深度数据进行关联转换,并保存至所述处理终端。
24、本技术另一方面,提出一种实现权利要求1-5中任一项所述的具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置的方法,包括如下步骤:
25、s100、通过扫描系统扫描获取并发送肿瘤组织的三维深度扫描数据至处理终端;以及获取所述肿瘤诊疗器械的实时三维空间坐标位置数据,并发送至所述处理终端;
26、s200、所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述肿瘤组织的进针方向和深度引导数据;所述处理终端还用于接收所述定位模块发送的三维空间坐标位置数据,通过所述三维空间坐标位置数据反馈调节所述机器人的机器人坐标,并将反馈调节的机器人坐标发送至机器人;
27、s300、机器人接收所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;
28、s400、肿瘤诊疗器械在所述机器人的进针方向和深度引导下,到达所述肿瘤组织位置进行肿瘤手术。
29、作为本技术的一种可选实施方案,可选地,在步骤s200中,所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述肿瘤组织的进针方向和深度引导数据;所述处理终端还用于接收所述定位模块发送的三维空间坐标位置数据,通过所述三维空间坐标位置数据反馈调节所述机器人的机器人坐标,并将反馈调节的机器人坐标发送至机器人;还包括:
30、s210、获取所述三维深度扫描数据;
31、s220、根据预设解析规则对所述三维深度扫描数据进行解析,获得所述肿瘤组织的三维空间坐标数据;
32、s230、对所述三维空间坐标数据进行过滤和降噪处理,得到肿瘤三维预处理数据。
33、作为本技术的一种可选实施方案,可选地,在步骤s200中,所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述肿瘤组织的进针方向和深度引导数据;所述处理终端还用于接收所述定位模块发送的三维空间坐标位置数据,通过所述三维空间坐标位置数据反馈调节所述机器人的机器人坐标,并将反馈调节的机器人坐标发送至机器人;还包括:
34、s211、根据所述肿瘤三维预处理数据,建立所述机器人到所述肿瘤组织的进针方向数据;
35、s221、根据所述肿瘤三维预处理数据,建立所述机器人到所述肿瘤组织的进针深度数据;
36、s231、获取所述反馈调节的机器人坐标,并将所述反馈调节的机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换。
37、作为本技术的一种可选实施方案,可选地,在步骤s231中,获取所述机器人坐标,并将所述机器人坐标分别与所述进针方向数据和所述进针深度数据进行关联转换,包括:
38、s212、根据解析规则对所述反馈调节的机器人坐标进行解析,获得所述机器人的坐标解析数据;
39、s222、将所述坐标解析数据与所述进针方向数据进行关联转换,并保存至所述处理终端;
40、s232、将所述坐标解析数据与所述进针深度数据进行关联转换,并保存至所述处理终端。
41、本技术另一方面,还提出一种控制系统,包括:
42、处理器;
43、用于存储处理器可执行指令的存储器;
44、其中,所述处理器被配置为执行所述可执行指令时实现权利要求6至9中任意一项所述的实现所述具备位置反馈的肿瘤诊疗器械进针方向和深度引导装置的方法。
45、本发明的技术效果:
46、本技术通过扫描系统扫描获取并发送肿瘤组织的三维深度扫描数据至处理终端;以及获取所述肿瘤诊疗器械的实时三维空间坐标位置数据,并发送至所述处理终端;通过所述处理终端接收所述三维深度扫描数据,根据所述三维深度扫描数据,建立并发送机器人到所述肿瘤组织的进针方向和深度引导数据,并通过所述三维空间坐标位置数据反馈调节所述机器人的机器人坐标,并将反馈调节的机器人坐标发送至机器人;通过机器人接收所述进针方向和深度引导数据,并根据所述进针方向和深度引导数据,进行运动;实现肿瘤诊疗器械在所述机器人的进针方向和深度引导下,到达所述肿瘤组织位置进行肿瘤手术。能够基于肿瘤组织的三维扫描数据,控制机器人带动肿瘤诊疗器械的进针方向和深度,能够实现肿瘤诊疗的自动化治疗,节省医疗人力,提高医疗时效。考虑到肿瘤诊疗器械的三维坐标,使得机器人的运动坐标参数得到肿瘤诊疗器械的三维坐标的位置矫正,提高机械运动的轨迹,提高肿瘤诊疗器械的末端到达肿瘤组织位置的精准度。
47、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!