一种超快超声穿刺增强成像方法与流程
本发明涉及超声穿刺增强成像,特别涉及一种超快超声穿刺增强成像方法。
背景技术:
1、目前,超声的穿刺增强技术是目前在临床上十分泛用的功能,其功能主要用于引导临床医师进行穿刺手术。当前穿刺增强技术的实现主要透过与之配套的穿刺架(或其他类型的导航硬件)来评估穿刺针的进针位置,搭配上软件的算法对针体进行区域增强。此外也有不透过穿刺架进行针体固定的穿刺增强方法,透过发射一连串的检测信号来评估针体的角度。在现有技术的支持下,一般需要增加一序列跟随着穿刺针插入方向倾斜的固定偏转角度发射信号所生成的超声图像,此发射信号需要尽可能的垂直于针体的进针角度以获得最大反射信号,此时针体图像就最为明显。获得最大的反射信号后可以透过图像增强与混合等方式加强针体在图像中的显示效果,提高穿刺手术的安全性。
2、在穿刺增强的临床使用场景下,经常面临到的情况是针体有些微的穿刺角度变动,在确定好偏转角度后因为穿刺针角度的改变,没办法达到垂直于针体进针角度的理想条件,进一步导致固定偏转角的发射信号没办法对穿刺针进行完整的成像,进一步影响了对进针角度的判断。此外,较细的针体在穿刺的过程中可能发生部分的弯曲等形变(试图穿过较硬的组织),使得单一偏转角度对穿刺针的增强效果下降与穿刺路径的描绘误差增加,影响临床使用者对穿刺针位置与手术有效性的判断。以上两种现象可以透过上述使用穿刺架方法进行缓解,但伴随的会大幅度降低临床上手术的灵活性与自由度。同时在手术过程中对穿刺针角度不断进行手动校正,会延缓整体手术的进程且带来许多不方便。
3、在超声穿刺手术的过程中,对针体的精确定位与清晰的图像是最重要的基础。现阶段超声穿刺增强大多借助硬件定位结合软件实现达到临床上手术辅助的效果,对手术的有效性以及安全性提供了一定的保障。穿刺增强除了由硬件或外部设备的辅助之外,一般会在发射序列中针对特定的偏转角度进行图像帧信号的采集,加强穿刺针的可视化。发射一与穿刺针表面形成大夹角的超声波束,使探头接收的回波信号增多强化超声显影,而穿刺针针体的一段表面会被设计为螺旋状,使的超声在该表面形成高回声反射面,使针体在图像中反射的亮度高于周遭的组织信号,更好地引导用户进行手术提高穿刺过程中的精确性。
4、为了使穿刺针在图像帧中有高亮显像,一般将穿刺针的部分针体做成螺旋状的设计(或其他特殊形状的刻画)。在此种设计之下可以提高穿刺针的视觉呈现效果但也同时带来一定的风险。一般穿刺针只在一段针体上进行螺纹设计,并不利于对穿刺器械的全程跟踪以及定位。此外,这种设计对穿刺针体的受力结构会造成一定影响,会带来部分的受力分布不均以及特定的薄弱点,影响了穿刺针的抗弯折能力与硬度,使得手术过程中穿刺针可能会产生弯曲甚至有折断的风险。
技术实现思路
1、本发明目的之一在于提供了一种超快超声穿刺增强成像方法,目的为解决当前穿刺增强对于穿刺针角度变动以及穿刺路径误差与针体位置判断的校正问题。本发明专利结合深度学习与图像处理技术,旨在提供更精准的穿刺针定位与针体弯曲校正问题。
2、本发明实施例提供的一种超快超声穿刺增强成像方法,包括:
3、s1:在单位时间内初始轮以超快平面波发射若干个长步长不同偏转角度的宽波束信号,根据用户对穿刺针进入的方向选择特定的偏转区域;
4、s2:获取多帧不同发射角度之下平面波偏转图像,并输入一预训练的穿刺针角度判别神经网络;
5、s3:获取穿刺针角度判别神经网络输出的最优穿刺针粗估角度;
6、s4:在下一轮发射时以上一轮输出的最优粗估角度为中心向两侧扩增特定角度发射干个短步长不同偏转角度的宽波束信号;
7、s5:获得的不同发射角度之下平面波偏转图像,输入一预训练的穿刺针角度判别神经网络,获得最优穿刺针精确角度;
8、s6:最优穿刺针精确角度所包含针体概率判断是否为单一角度,若针体弯曲或是部分区段针体偏移导致单一偏转角无法对针体完整成像则重复步骤s5,直至筛选出最优穿刺针精确角度中较优的2个精确发射角度,并比较该2个精确发射角度存在穿刺针偏移的角度偏差,若角度偏差大于特定阈值则标记为穿刺针体可能弯曲;
9、s7、后续单位时间内以最优穿刺针精确角度进行特定偏转角的发射,对该偏转角仅发射一次所形成的图像帧数据进行穿刺针针体的检测。
10、优选的,超快超声穿刺增强成像方法,还包括:
11、s8、若是穿刺针体被标记为可能弯曲则在步骤s7进行步骤s6所记录的较优的2个精确发射角度发射,并将所有偏转角所收到的图像帧数据进行穿刺针的检测;
12、s9、穿刺针检测的处理与包含将图像帧进行特征值分解滤波,保留图像中的信息后进行霍夫变换处理,用于定位针体所在的连线坐标点,并将多个连线坐标点进行拟合出穿刺针沿当前行进方向的穿刺路径;
13、s10、将穿刺针检测处理完成的图像帧进行沿着步骤s7中计算出最优穿刺针精确角度的方向滤波与形态学滤波,将图像帧中穿刺针的断面进行连接;
14、s11、若是穿刺针体被标记为可能弯曲则在步骤9进行穿刺针体的拼接,给定特定阈值进行两帧穿刺针图像起终点的判断,根据用户对穿刺针进入的方向对该方向远端的穿刺针图像进行固定权重的混和,结合两帧穿刺针图像的坐标点集合进行拟合,标记出穿刺针沿当前行进方向的穿刺路径;
15、s12、输出图像,将检测出的针体图像进行二值化处理,穿刺针区域以特定阈值判断并标记为针体坐标,将针体坐标点进行图像增强后以固定权重混合叠加上背景b图像,并标注出穿刺针路径。
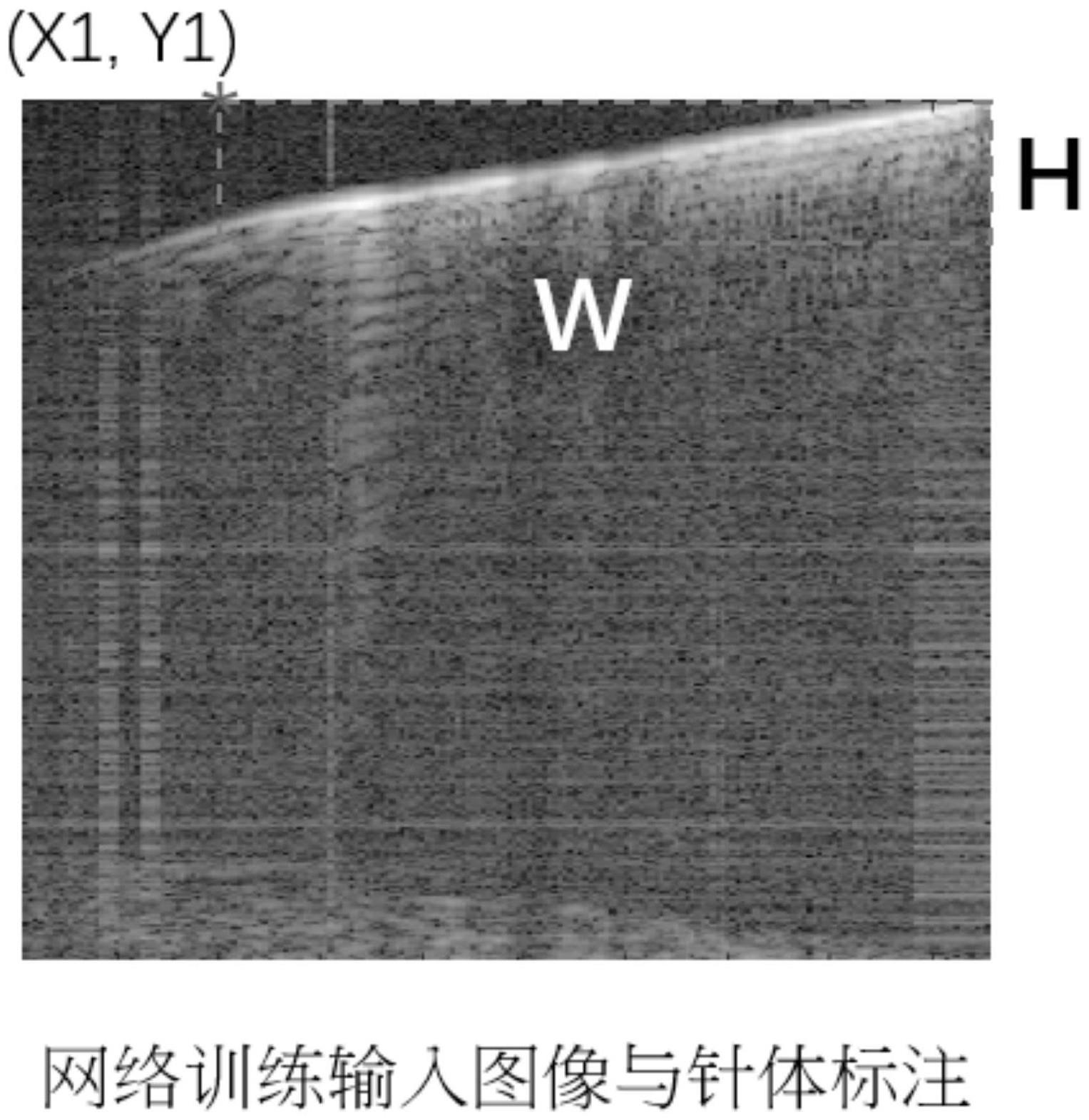
16、优选的,在步骤s2中,穿刺增强在临床上要求实时成像,对计算以及判断的稳定性要求较高,本发明选择预训练的神经网络为yolov5-lite,采用一阶识别网络提高计算速度与尽量减少gpu消耗,避免平面波超声计算消耗过大导致系统卡顿与降低帧频等现象。预训练输入图像为不同场景下临床穿刺针图像序列与穿刺针所在最小矩形框坐标位置[x1,y1,w,h],其中x1与y1分别是矩形框左上角的坐标位置,w与h分别是标记框的宽度与高度,如下图1中所示。穿刺针图像中的针体需要尽可能完整与针尖端明显,输入网络训练前对穿刺针图像进行多尺度的各向異性卷积滤波,对图像增强提高穿刺针的识别概率。
17、优选的,在步骤s3中,将13帧不同发射角度之下平面波偏转图像输入与训练网络,网络输出13个图像帧的穿刺针所在位置以及为穿刺针的概率,针对序列的穿刺针输出概率进行排序,以最大概率穿刺针图像帧的检测结果所发射平面波的角度作为当前优先粗估角度n0。
18、优选的,在步骤s4中,扩增角度选择为步骤1中的最小步长5°,以粗估角度n°计算本轮次需要的平面波发射偏转范围[(n0-5)°,(n0+5)°],以步长为1°进行11个偏转角度的平面波发射。
19、优选的,在特征值分解滤波阶段,首先选取一维度为m×n的图像帧,对列均值计算得到图像帧与列均值差分的结果,并计算协方差矩阵,计算方法如下:
20、
21、其中,imgneedle为输入的m×n维图像帧,n为图像帧的较大维度;
22、接下来对协方差矩阵计算其特征值分解结果并对特征值进行降幂排序为[s0,s1,s2…sn],选择保留降幂排序特征值列表中s2以下的信号,滤除图像帧中的噪声信号。
23、优选的,考虑到单一角度下穿刺针一般为直线,对滤波后的图像帧进行霍夫变换,用来分离出图像中的直线段信号,透过坐标转换将直角坐标系下的各项参数映射到极坐标参数下,在图像中的直线段可以由直角坐标系下原点至直线的距离ρ与x轴至垂线的极角θ确定,在转换后将直线在直角坐标系下参数(a,b)转换为(ρ,θ),图像帧中的直线段可以由统计极大值检测,滤波后的图像帧中的穿刺针信号借此方法将直线段检测转变由对特定参数进行极大值统计的方法。
24、优选的,所述步骤s10中,构建一维度为k*k的二维高斯核函数滤波器g其每一轴向的分布的系数可以由位置参数x∈[-k/2:1:k/2]与尺度参数σ确定,其概率密度函数为:
25、
26、其中,exp为指数函数,x’为核函数,σ为尺度参数,选择k为7,σ为0.5,构建好的二维高斯核滤波器进行步骤7中所得到精确角的偏转,对所获得的图像帧进行方向滤波,强化穿刺针的形态结构。
27、优选的,在步骤s11中,若是穿刺针被标记为弯曲(bend=1)则在步骤10会处理两个穿刺针的图像帧,对两幅穿刺针图像重叠的部分以p=0.5的权重进行混和。给定穿刺针幅度阈值pth,并以每一列大于pth的坐标点作为穿刺针表面,统计所有的坐标集合{[x0,x1,…,xn],[y0,y1,…,yn]}并对其进行拟合,得到拟合后的穿刺路径。
28、优选的,其特征在于,在步骤s12中,将混和后的穿刺针图像进行二值处理形成一带有穿刺针针体的二值掩膜,将背景b图像中二值掩膜为1的坐标点向外延扩增3pixel的坐标集合施与p=0.8的权重,将混和后的穿刺针图像帧乘上二值掩膜后叠加到背景b图像上。
29、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
30、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!