一种非圆带轮五杆机构驱动的手指康复装置及其使用方法
本发明属于医疗器械,具体涉及一种非圆带轮五杆机构驱动的手指康复装置及其使用方法。
背景技术:
1、现代社会人口老龄化问题日益严重,而老年人作为易患脑卒中的高危人群,中风后往往会出现肌肉僵硬、手部功能丧失等问题。手作为人体与外界交互的重要器官之一,其正常的运动能力是人们完成日常活动的关键。对中风后的患者进行手指康复治疗以恢复手部正常功能有助于帮助他们实现生活自理。传统的康复治疗多为被动地促使手指重复性完成规定动作从而修复受损神经,但同时也存在劳动力大、成本高且时间和地点受限等缺点。而患者可以借助手指康复装置自行完成康复训练、降低治疗成本,通过标准化重复性的运动锻炼手指肌肉、修复神经,从而恢复手指运动机能。
2、目前,国内外关于手指康复机构的研究大都以手指指尖的运动轨迹为目标,通过多连杆机构实现目标轨迹。随着现代控制技术的发展,近年来不少学者开始研究多自由度手指康复机构,通过多关节多自由度协调控制来模拟手指各关节轨迹曲线。但上述机构的仿生效果仅体现在各关节的独立运动轨迹,并未考虑到手指姿态和轨迹间的对应性,再加上对控制程序的高要求,使得这类手指康复机构无法普及。因此,有必要提出一种结构简单且能在手指康复过程中实现手指姿态和轨迹之间对应关系的外骨骼康复机构,以此提高患者手指运动能力。
技术实现思路
1、本发明的目的是为了克服现有技术不足,提出一种非圆带轮五杆机构驱动的手指康复装置及其使用方法。
2、为实现上述目的,本发明采用以下技术方案:
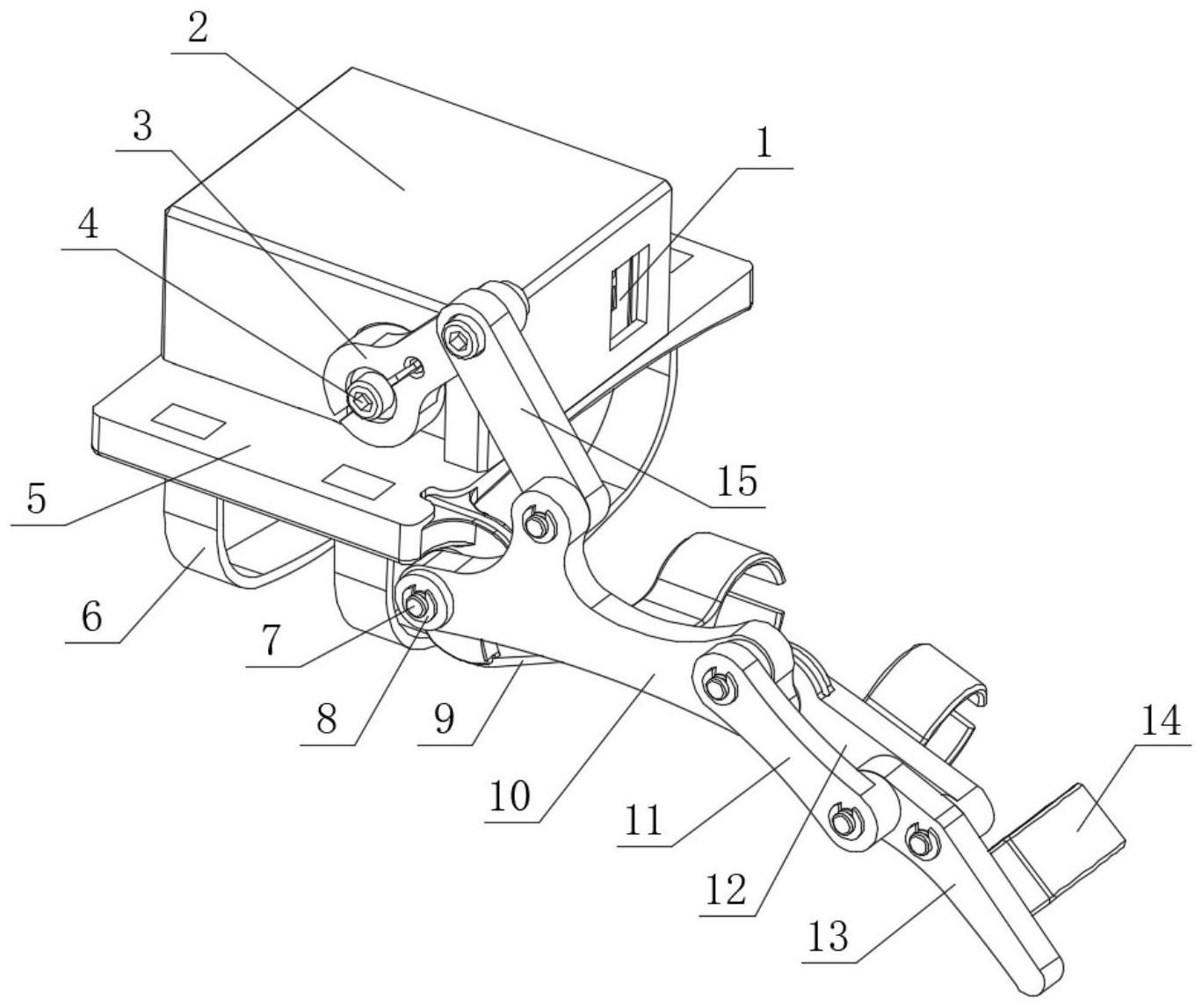
3、本发明一种非圆带轮五杆机构驱动的手指康复装置,包括驱动装置和外骨骼装置。所述的驱动装置包括舵机、舵机臂、手背板、绑带和传动连杆;所述舵机的壳体固定在手背板上表面;舵机的输出轴与舵机臂的一端固定;传动连杆的两端分别与舵机臂的另一端和外骨骼装置中近指连杆中部一体成型的连接杆铰接;所述手背板的下表面固定有间距设置的两个绑带。
4、所述的外骨骼装置包括非圆带轮机构和五杆机构;所述的非圆带轮机构包括主动轮、细绳和从动轮;所述的主动轮和从动轮均竖直放置,主动轮与手背板固定;所述主动轮的轮廓由上部的工作段轮廓和下部的回程段轮廓组成;所述从动轮的轮廓为圆;细绳的一端与主动轮的工作段轮廓起点固定,另一端由从动轮下方绕过从动轮,并由从动轮上方绕出从动轮,固定在主动轮下端的回程段轮廓起点。所述的五杆机构包括近指连杆、中间连杆、中指连杆和远指连杆;近指连杆的两端分别与主动轮和从动轮铰接;中指连杆的尾端与从动轮固定,另一端与远指连杆中部的弯折段铰接;中间连杆的尾端与近指连杆头端一体成型的连接块铰接,头端与远指连杆的尾端铰接;近指连杆、中指连杆和远指连杆上位于同一侧均固定有指套。
5、优选地,所述的绑带采用松紧带。
6、优选地,所述手背板的底面为拱形。
7、优选地,所述的主动轮和从动轮的轮廓上均开设有环形槽。
8、优选地,所述近指连杆与主动轮的铰接中心和舵机转动中心的连线、近指连杆与主动轮的铰接中心和近指连杆与传动连杆的铰接中心的连线、舵机臂以及传动连杆组成平行四边形机构。
9、优选地,各铰接处均通过销轴和卡簧连接实现。
10、优选地,所述近指连杆转动的角度范围为0~40°。
11、优选地,所述的指套开设有开口,且指套内侧设有压力传感器。
12、优选地,对非圆带轮机构中主动轮的轮廓进行建模,具体如下:
13、设近指连杆与主动轮的铰接中心为o1,近指连杆与从动轮的铰接中心为o2,主动轮和从动轮的中心距为a;近指连杆转动时,等效为主动轮带动从动轮反向转动,设主动轮和从动轮的瞬时角速度分别为ω1和ω2,主动轮转角为时从动轮转角为此时细绳与主动轮的工作段轮廓切点为c1,细绳与从动轮下部轮廓的切点为c2,主动轮在c1处的曲率半径和从动轮在c2处的向径分别为r1和r2;由o1和o2向c1和c2的连线作垂线,设垂距分别为p1和p2,o1到c1和c2连线的垂线与向径r1所在直线的夹角为α1,o2到c1和c2连线的垂线与向径r2所在直线的夹角为α2,由于从动轮为圆,α2=0;主动轮和从动轮的传动侧相对细绳作纯滚动,则瞬时传动比i12为:
14、
15、细绳在c1点的线速度等于主动轮在c1点的线速度ω1r1,细绳在c2点的线速度等于从动轮在c2点的线速度ω2r2;又由于采用没有弹性的细绳,所以线速度ω1r1和ω2r2在细绳方向上的分速度相等,即ω1r1cosα1=ω2r2cosα2。则传动比i12转化为:
16、
17、设c1和c2的连线与o1和o2的连线交于点o3,令o2与o3的距离则由几何关系得:
18、
19、
20、根据式(2)和式(3)以及α2=0,得主动轮的向径r1表达式为:
21、
22、由于i12时刻变化,将i12表示为主动轮转角的函数:再结合式(3)和式(4),得到r1的极坐标方程:
23、
24、从而得到主动轮的轮廓极坐标表达式。
25、本发明一种非圆带轮五杆机构驱动的手指康复装置的使用方法,具体如下:
26、控制器控制舵机以设定的转速和旋转角度往复正反转,舵机驱动舵机臂往复转动,进而通过传动连杆带动外骨骼装置往复运动。舵机正转时,舵机驱动舵机臂,舵机臂通过传动连杆带动近指连杆向下转动,并进一步带动从动轮绕主动轮做向下转动的行星运动,同时从动轮朝向主动轮的那部分轮廓在自身与细绳之间的摩擦力作用下相对于近指连杆向上转动,进而带动中指连杆向下转动,并进一步带动远指连杆向下转动;舵机反转时,舵机臂通过传动连杆带动近指连杆向上转动,并进一步带动从动轮绕主动轮做向上转动的行星运动,同时从动轮朝向主动轮的那部分轮廓在自身与细绳之间的摩擦力作用下相对于近指连杆向下转动,进而带动中指连杆向上转动,并进一步带动远指连杆向上转动。
27、本发明有益效果如下:
28、1、本发明通过舵机驱动舵机臂往复转动,使传动连杆带动外骨骼装置往复运动,从而带动手指屈曲和伸展,完成康复训练,且该康复训练过程中,手指在外骨骼装置牵引下的运动模式与人手指自然运动基本一致,实现了手指姿态与外骨骼装置的运动轨迹的对应性;本发明零件数量少且体积小,结构简单,且外骨骼装置的五杆机构可以根据患者的手指长度进行个性化设计,并采用树脂材料通过3d打印技术进行制造,保证零件强度的同时减轻装置的重量,实现轻量化,便于携带,且成本低,消耗劳动力少,易普及。
29、2、本发明中主动轮的轮廓由上部的工作段轮廓和下部的回程段轮廓组成,工作段轮廓和回程段轮廓均不是圆弧,从而近指连杆上下往复转动时能保证细绳带动从动轮转动,进而在不额外增加动力的情况下带动中指连杆和远指连杆跟随近指连杆转动,达到本发明只采用一个动力源便实现整个手指康复训练要求的设计目的,结构巧妙,成本低,控制简单。
30、3、本发明通过建立主动轮的轮廓模型,实现掌指关节(mcp)和近指间关节(pip)间的非匀速比传动关系,在保持良好传力特性的同时保证外骨骼装置的运动模式更贴近人手指自然运动,康复训练效果更好。
31、4、本发明中控制器控制舵机的转速和旋转角度,同时各指套内侧均设有压力传感器,压力阈值可根据患者的康复情况进行调整,一旦超过压力阈值则控制舵机减速,保证患者在康复训练过程中不受伤害的同时,使患者康复水平与训练强度相匹配,加快康复进程。
- 还没有人留言评论。精彩留言会获得点赞!