一种基于力反馈的椎间孔镜手术髓核夹取虚拟仿真方法
本发明涉及力触觉模拟、生物组织变形模拟领域,尤其是涉及一种面向操作对象存在大变形且实时性要求高的场景。
背景技术:
1、虚拟手术培训系统是一种新兴的辅助手术培训方式,是一项融合了机器人学、计算机科学、医学、生物力学等领域知识的研究。它能够有效地对传统手术培训方式中的缺陷进行补充,减少材料消耗,能够重复利用,能够记录培训者操作以供指导人员回顾、指正。尤其是在微创手术等学习曲线较大的领域它能够发挥较好的培训功能。
2、髓核夹取是椎间孔镜手术中十分重要的一个环节。在该操作中医生无法直接通过视觉观察到操作对象而只能通过孔镜对现场进行观察,通过手中工具的力触觉进行感受,在实际操作中具有一定的困难。而在虚拟手术的实现上,该操作涉及对象的大变形以及破坏,而此操作的仿真真实程度直接影响了培训系统给用户带来的沉浸感。因此如何在虚拟手术中采用合适的力觉重建技术以及三维重建技术至关重要。基于四面体网格的软组织位置动力学切割仿真算法的研究均未考虑生物力学特性对力触觉体验的影响(白隽瑄,潘俊君,赵鑫,et al.基于四面体网格的软组织位置动力学切割仿真算法[j].北京航空航天大学学报,2015,41(07):1343-52.)。
3、目前在髓核夹取操作的模拟上仍存在一定空缺,而在与其具有相似性质的场景模拟上存在一些问题。不同于视觉渲染,力触觉渲染对刷新率的要求往往更高,通常需要300hz-1000hz才能保证输出的力触觉更具真实性,因此对物理模型的计算速度有较高的要求,常见的物理模拟算法通常可分为基于网格的算法以及无网格算法,基于网格的物理模拟算法如有限元、质点弹簧、位置动力学等算法在面对物体大变形时通常容易造成模型崩溃,尤其是在面对模型撕裂时,上述方法需要对网格进行重新拓扑,这通常需要较大的计算量,导致难以实现实时性的要求。另外,目前大多数仿真方法在对软组织进行模拟时未考虑生物力学特性的影响。
技术实现思路
1、针对现有技术中的不足之处,本发明旨在实现一种基于力反馈的椎间孔镜手术髓核夹取虚拟仿真方法,以满足虚拟手术中的实时性和真实感的要求。本发明的目的为通过改进的物质点法,通过设置合适的本构方程,解决现有模拟算法中大变形物体的模拟中难以保证实时性,且模拟对象不具备生物组织力学特性的问题。本发明考虑了髓核组织的生物力学特性进行计算,能够更好地实现虚拟椎间孔镜手术中的髓核夹取操作,对髓核组织的变形撕裂行为进行逼真的模拟。
2、本发明所采用的技术方案包括以下步骤:
3、一种基于力反馈的椎间孔镜手术髓核夹取虚拟仿真方法,包括以下步骤:
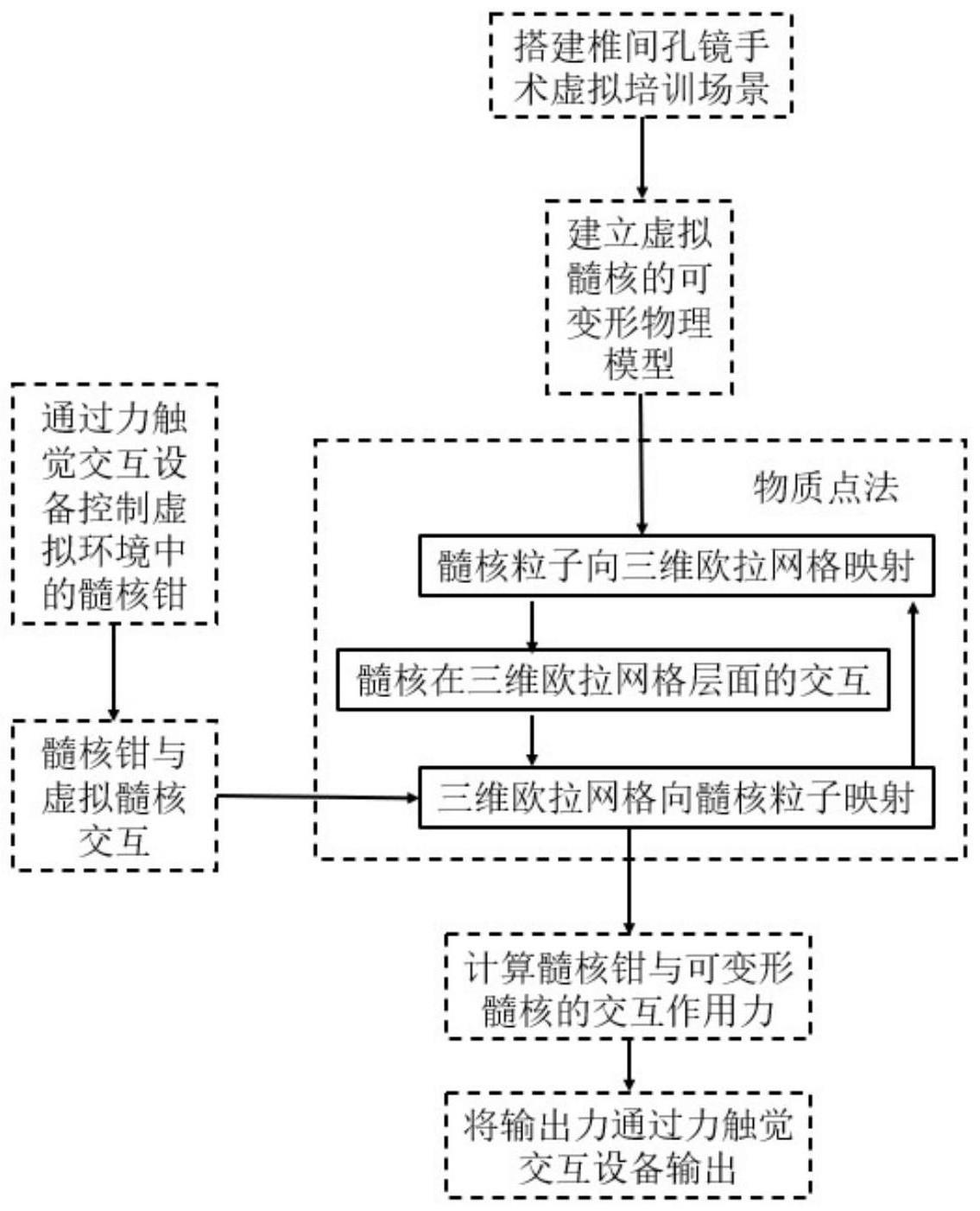
4、步骤1、搭建椎间孔镜手术虚拟培训场景;
5、步骤2、基于物质点法建立虚拟髓核的可变形物理模型;
6、步骤3、通过力触觉交互设备控制虚拟环境中的髓核钳去夹取虚拟髓核;
7、步骤4、检测虚拟髓核钳与虚拟髓核是否发生干涉,并模拟虚拟髓核与髓核钳交互时的变形;
8、步骤5、采用改进的物质点法仿真模拟虚拟髓核在交互时的变形以及应力状况,在物质点法中根据髓核的粘弹性、塑性特点设置本构模型;
9、步骤6、基于虚拟髓核的变形计算髓核钳与可变形髓核的交互作用力;
10、步骤7、将计算的虚拟髓核钳受力,通过力触觉交互设备输出到操作者手上,实现虚拟培训过程中的力触觉交互模拟。
11、进一步地,步骤1中所述的椎间孔镜手术虚拟培训场景是通过三维软件按照真实椎间孔镜手术中的手术室以及髓核钳建模而成的虚拟场景。
12、进一步地,步骤2中所述可变形物理模型是将髓核模型离散为若干髓核粒子,将仿真系统的工作空间离散为l×w×h的三维欧拉网格,将髓核中的物理信息储存以髓核粒子以及三维欧拉网格为介质进行存储。
13、进一步地,采用碰撞检测算法检测虚拟髓核钳是否与虚拟髓核发生干涉,碰撞检测的对象为可变形物理模型的髓核粒子与虚拟的髓核钳。
14、进一步地,所述碰撞检测算法,包括以下步骤:
15、首先构造髓核钳碰撞包围盒,在钳嘴处设置obb包围盒,即在两个钳嘴上分别生成包围钳嘴的最小长方体,用于后续进行碰撞检测;
16、检测髓核粒子与髓核钳碰撞包围盒是否碰撞:检测线段与髓核钳碰撞包围盒是否有交点若无交点,则碰撞检测结束,若存在交点,则记录交点在第n帧的髓核钳碰撞包围盒坐标系下与髓核钳碰撞包围盒的相对位姿xp→r:
17、
18、其中,为第n帧髓核碰撞包围盒至虚拟环境坐标系的齐次变换矩阵;
19、获取髓核钳碰撞包围盒在第n+1帧时的位姿令髓核粒子在第n+1帧时的位姿为:
20、
21、其中,为第n+1帧髓核碰撞包围盒至虚拟环境坐标系的齐次变换矩阵,下标r表示髓核钳碰撞包围盒,下标p表示髓核粒子;为髓核粒子在第n帧时的位姿,为第n帧至第n+1帧时间段的位移。
22、进一步地,所述改进的物质点法包括以下步骤:
23、(1)物理信息由髓核粒子向三维欧拉网格上插值;
24、(2)髓核在三维欧拉网格层面的交互;
25、(3)从髓核粒子的角度计算髓核组织与髓核钳的交互,将物理信息由三维欧拉网格向髓核粒子上插值。
26、进一步地,所述改进的物质点法流程如下:
27、step 1、将物理信息由髓核粒子向三维欧拉网格映射,更新仿射速度矩阵增量
28、
29、其中,ωip为在三维欧拉网格i在髓核粒子p处的插值,可选用b-样条曲线进行插值,为物质点法中第n帧时三维欧拉网格i的动量变化量,xi为三维欧拉网格i的位置,为髓核粒子p在第n帧时位置,δx为物质点法中所设置三维欧拉网格的边长,i表示该物理量属于三维欧拉网格;
30、更新髓核粒子变形梯度:
31、
32、其中,分别为第n帧、第n+1帧时髓核粒子的变形梯度,i为单位矩阵、δt为仿真时设置的时间步长,为髓核粒子的仿射变换矩阵,初始化为零矩阵;
33、更新三维欧拉网格动量
34、
35、其中的p(f)为第一类piola-kirchhoff应力,该张量的确定与模拟对象本构模型的设置相关,为三维欧拉网格体积,mp表示髓核粒子质量,为髓核粒子在第n帧时的速度,xi表示三维欧拉网格的坐标;
36、更新三维欧拉网格质量
37、
38、step 2、髓核在三维欧拉网格层面的交互,计算临时三维欧拉网格速度
39、
40、其中为三维欧拉网格第n+1帧时的动量,表示三维欧拉网格第n+1帧时的质量;
41、根据边界条件更新三维欧拉网格速度即靠近边缘或障碍的三维欧拉网格朝向边缘或障碍的分速度置零:
42、
43、其中,表示髓核三维欧拉网格的边界条件,当髓核粒子处于边界时:
44、
45、其中,为第n+1帧时三维欧拉网格的临时速度,为边界处法向量;
46、step 3、三维欧拉网格向髓核粒子映射,更新髓核粒子临时速度
47、
48、更新髓核粒子仿射矩阵
49、
50、更新髓核粒子临时位置
51、
52、更新髓核粒子与髓核钳交互后的位置髓核粒子与髓核钳交互后的速度
53、
54、
55、其中,collide(x)即步骤4中的计算,表示髓核钳与髓核粒子之间的交互;
56、更新第n+1帧时髓核粒子速度增量与三维欧拉网格速度增量
57、
58、
59、其中,表示三维欧拉网格在第n+1帧时的质量,mp表示髓核粒子。
60、进一步地,所述本构模型是将髓核的变形梯度拆分为弹性变形梯度以及塑性变形梯度,并将弹性变形梯度与时间关联上,实现对生物组织力学特性的模拟。
61、进一步地,髓核的本构设置如下:
62、将髓核的变形梯度f拆分为弹性变形梯度fe以及塑性变形梯度fp:
63、f=fefp
64、其中,弹性变形梯度fe与塑性变形梯度fp由下式确定:
65、
66、
67、其中,j为变形梯度f的行列式,je为弹性变形梯度fe的行列式,je由下式确定:
68、
69、其中θc、θs分别为常量极限压缩比例与极限拉伸比例,kc、ks为常量,衡量材料的粘性;
70、确定完变形梯度后,应变能ψ(f)为:
71、
72、
73、
74、其中,μ(fp)、λ(fp)为拉梅系数,fp为塑性变形梯度,tr(·)表示矩阵的迹,μ0与λ0为初始拉梅系数,是衡量物体抗剪切能力以及抗体积压缩能力的常数,ξ为塑性硬化系数,是衡量物体抗塑性变形的能力,d为空间的维数,jp是fp的行列式;
75、令应变能ψ(f)对变形梯度求导,得第一类piola-kirchhoff应力为:
76、p(f)=μ(fp)(fe-fe-t)+λ(fp)log(je)fe-t
77、将上述第一类piola-kirchhoff应力带入改进的物质点法中,即可模拟具生物力学性能的髓核组织。
78、进一步地,步骤6中所述的交互作用力,通过以下方式获得:通过计算步骤5中,髓核粒子在虚拟髓核钳影响下的动量变化量,获取髓核粒子对虚拟髓核钳的冲量,从而获得虚拟髓核钳受力。
79、与现有技术相比,本发明具有以下优点:
80、(1)本发明结合了力反馈技术与虚拟现实技术,能够完成手术中的夹取动作,并对髓核组织的生物力学性能进行了模拟,能够表现出髓核组织的塑性、粘弹性特征,使用户能够在虚拟环境中手持力反馈设备与场景进行交互,能够给用户提供触觉、视觉、听觉上的完整体验。
81、(2)本发明使用的人体模型由人体医疗图像中提取出,医生能够根据手上病人的医疗数据搭建定制化的手术规划系统,比起使用通用模型更具训练价值。
82、(3)本发明使用改进的物质点法,保证了模型在大变形以及撕裂动作下的稳定性以及计算速度。
83、(4)本发明通过设置合适的本构,能够表达出生物组织的粘弹性特性。
- 还没有人留言评论。精彩留言会获得点赞!