一种用于脑卒中偏瘫患者步态矫正训练的助行装置
本发明涉及医疗辅助器械,尤其涉及一种用于脑卒中偏瘫患者步态矫正训练的助行装置。
背景技术:
1、脑卒中(中风)已经成为导致残疾的一大因素,脑卒中偏瘫人群的数量会进一步增加,偏瘫严重影响了患者和家人的生活质量,并导致社会医疗成本不断攀升,给个人、家庭和社会都带去了沉重的负担,帮助偏瘫病人恢复基本运动机能,重返正常生活是具有重要的社会意义。大部分偏瘫患者的功能恢复很难完全,虽然部分患者能够独立行走但是步态异常,而异常的步态将对患者的膝关节、脊柱等身体器官造成一系列继发的不良影响,从而引发其他身体疾病,同时其也会对患者的心理造成负面影响,使得患者无法真正融入到社会生活中。因此,帮助脑卒中偏瘫人群进行康复助行训练是亟待解决的社会问题。
2、偏瘫患者一般会具有典型的偏瘫步态,也叫画圈步态,患者在行走的过程中,患侧下肢受肌无力和肌肉痉挛的影响,必须要抬高臀部,利用身体的力量把腿脚抬起来,然后将腿向身体旁边一侧甩,做一个向外画圈动作,把腿甩至身体的前侧,再将重心移到患腿上,然后迈开健康的腿才能够向前移动。偏瘫患者的步态训练和婴儿学步的原理相似,需要通过大量的、重复的、正确的步行训练,才能让患者再次顺利的行走。一旦患者长期使用偏瘫步态,异常动作会逐渐固化,很难矫正。步态训练是偏瘫患者康复训练中的重要一环。现有的助行装置一般很少有辅助患者康复的功能,很少有能够矫正患者不正确的走路姿势的,而偏瘫患者的康复中,偏瘫步态的矫正是康复的重要一环。
3、目前,用于偏瘫患者下肢康复训练的设备主要包括普通支架式助行器和康复机器人两大类。普通支架式助行器价格便宜,使用方便,是大多数患者的首选,但由于偏瘫患者的缺少脑神经信号对患肢的控制,导致患肢不能正常发力,从而不能从根本上矫正偏瘫步态。康复机器人一般是由机械带动患者做被动运动,对于脑卒中发病初期,卧床不起的急性期患者具有很好的疗效。但是,患者通过被动运动做训练时,其康复效果远不如主动运动,因此,对于有一定行走能力的康复期偏瘫患者,康复机器人的作用会明显下降;更最重要的是,康复机器人价格昂贵,普通人群难以承受,不能适用于居家康复的需要。
4、偏瘫步态主要是由肌无力和肌肉痉挛所引起的,其中,肌无力主要是因为大脑对应的运动控制神经受损,不能够产生发力信号,但肌肉本身并无损伤;肌肉痉挛则主要是因为受损的大脑异常放电所致。功能性电刺激是一种常见的康复方式,其属于神经肌肉电刺激类物理技术,是通过预先设计的低频序列脉冲电流以特定的波形、强度和重复频率,按照既定程序刺激特定肌群,诱发肌肉模拟正常自主运动或依据治疗方案完成特定动作,能够加速脑卒中患者神经可塑性转变进程,并逐渐恢复肢体运动功能。但是,功能性电刺激在诱发肌肉持续运动时持续的刺激也会导致肌肉的疲劳,过度使用反而会导致肌肉受损;同时对于偏瘫患者,功能性电刺激产生的肌肉收缩力量较小,无法帮助患者自主运动,控制方面存在较大难度。
5、目前为矫正偏瘫患者的异常步态行为,需为患者配备一特定形状的支架,这种支架较为笨重,患者行走时非常费力,且穿脱该支架时也非常不便。因此,把机械助力和功能电刺激相结合进行步态训练,可以充分利用两者的特点,优势互补,达到最佳康复效果。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种用于脑卒中偏瘫患者步态矫正训练的助行装置。可矫正偏瘫患者异常步态。
2、为了解决上述技术问题,本发明提供了一种用于脑卒中偏瘫患者步态矫正训练的助行装置,包括:支撑助行结构、机械力传导助力模块、功能电刺激助力模块和悬吊减重模块;所述支撑助行结构包括支架和若干连接杆,所述支架和所述连接杆支撑包围所述脑卒中偏瘫患者,所述机械力传导助力模块活动设置于所述支撑助行结构上并连接所述脑卒中偏瘫患者的健肢和患肢,所述健肢通过所述机械力传导助力模块带动所述患肢,所述功能电刺激助力模块与所述机械力传导助力模块电性连接,所述悬吊减重模块设置于所述支撑助行结构上,所述脑卒中偏瘫患者穿戴所述悬吊减重模块。
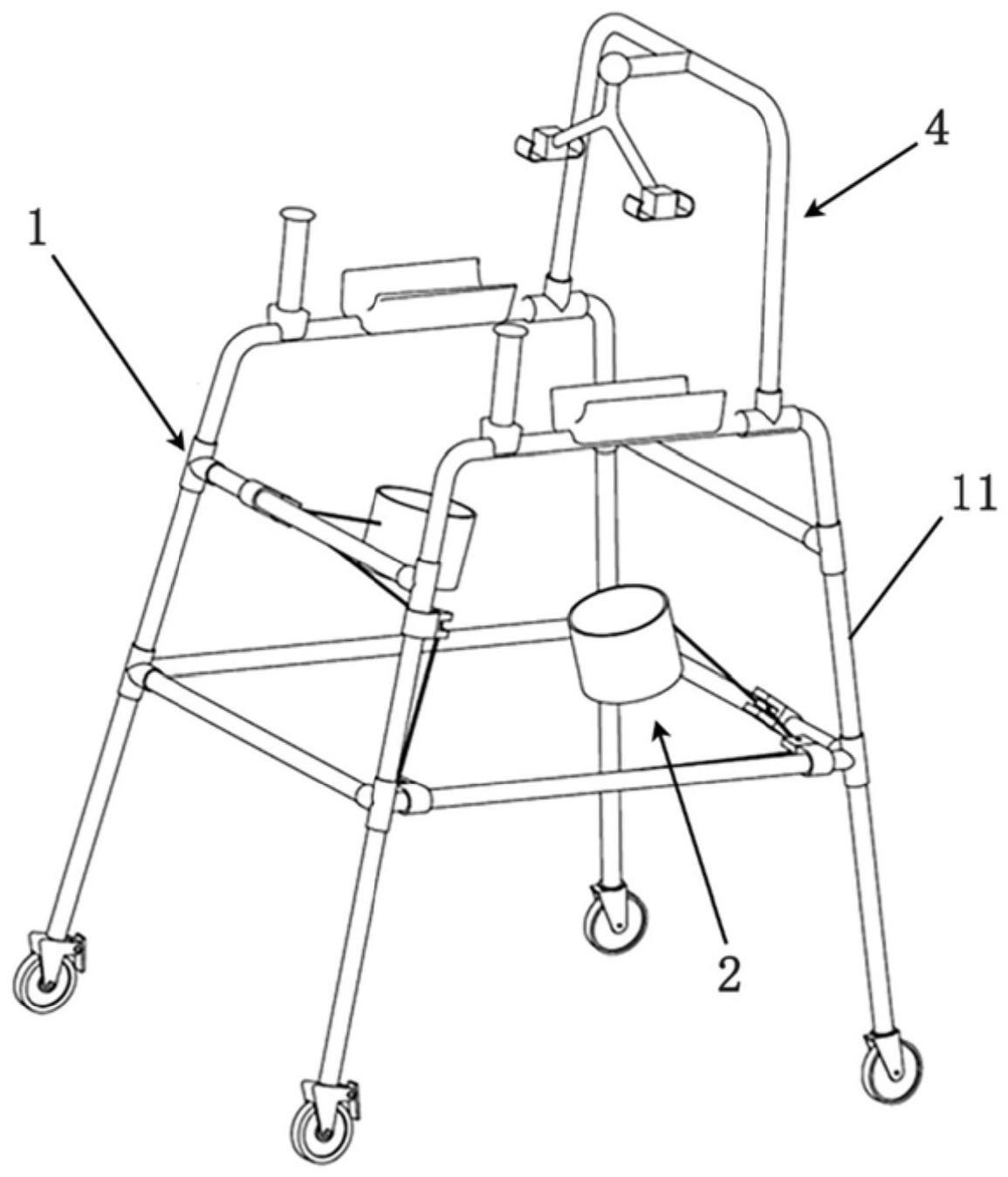
3、其中,所述支架可拆卸,所述支架具有前支撑杆和后支撑杆各两个,所述前支撑杆底部均装有万向轮,所述后支撑杆底部均装有定向轮,两个所述前支撑杆之间设有第一连接杆和第二连接杆,两个所述后支撑杆之间设有第三连接杆和第四连接杆,左侧的所述前支撑杆和所述后支撑杆之间分别设有第五连接杆和第六连接杆,右侧的所述前支撑杆和所述后支撑杆之间分别设有第七连接杆和第八连接杆,所述第一连接杆、所述第三连接杆、所述第五连接杆和第七连接杆位于相同高度,所述第二连接杆和所述第四连接杆位于相同高度,所述第六连接杆连接左侧的所述前支撑杆和所述后支撑杆顶部,所述第八连接杆连接右侧的所述前支撑杆和所述后支撑杆顶部。
4、其中,所述第六连接杆和所述第八连接杆上还对称设有两个手臂托架和两个手柄。
5、其中,所述万向轮上设有刹车结构。
6、其中,所述机械力传导助力模块包括第一腿套、第二腿套、若干滑轮和弹力绳,第一滑轮设置于所述第三连接杆上,第二滑轮设置于所述第七连接杆靠近所述第三连接杆的一端,第三滑轮设置于所述第七连接杆靠近所述第一连接杆的一端,第四滑轮设置于所述前支撑杆上,第五滑轮设置于所述第二连接杆上,所述弹力绳的一端与所述第一腿套的后侧连接后依次穿过所述第一滑轮、所述第二滑轮、所述第三滑轮、所述第四滑轮和所述第五滑轮,所述弹力绳的另一端与所述第二腿套的前侧连接,所述弹力绳上设有薄膜拉伸传感器,所述薄膜拉伸传感器与所述功能电刺激助力模块电性连接。
7、其中,所述功能电刺激助力模块包括信号处理器、刺激电极、电极通信电缆、电刺激发生器、信号连接线,所述功能电刺激助力模块设置于所述支架上,所述刺激电极贴于所述脑卒中偏瘫患者患肢,所述刺激电极通过所述电极通信电缆与所述电刺激发生器电性连接,所述电刺激发生器通过所述信号连接线与所述信号处理器电性连接,所述信号处理器与所述薄膜拉伸传感器电性连接,所述信号处理器调节电流的脉冲幅值、脉宽和频率。
8、其中,所述悬吊减重模块包括悬吊支架、弹性柔索、两个挂钩和承重安全背带,所述悬吊减重模块为可拆卸结构,所述悬吊支架设置于所述第六连接杆和所述第八连接杆上,所述弹性柔索设置于所述悬吊支架上,两个所述挂钩对称设置于所述弹性柔索,所述承重安全背带挂靠于所述挂钩上。
9、实施本发明,具有如下有益效果:
10、采用功能电刺激诱发肌肉力矩,模拟正常自主运动,能够加速偏瘫患者神经可塑性转变进程,逐渐恢复肢体运动功能。
11、通过主动运动触发电刺激,使得大脑运动意图与外部电刺激匹配,从而做到体脑一致,达到最佳训练效果。
12、悬吊装置具备减重作用,并且对患者上身起到姿势矫正作用。
13、采用主动的方式对偏瘫患者的偏瘫步态进行矫正训练,对偏瘫患者的两条腿进行交替式的矫正锻炼,对偏瘫部分的腿脚施加电刺激,需要患者自己增加训练时的力量,可以有效增强肌肉记忆和肌肉的力量,对患者的腿脚进行训练时,可以控制施加在腿套上的力道,从而调整患者在进行矫正训练时受到的力度,对于偏态步态的矫正以及肌肉力量的恢复,具有很好的效果。
- 还没有人留言评论。精彩留言会获得点赞!