一种用于血管介入手术的导管导丝直线驱动装置的制作方法
[]本发明涉及医疗器械,具体地说是一种用于血管介入手术的导管导丝直线驱动装置。
背景技术:
0、[背景技术]
1、血管介入手术是指临床医生借助数字减影血管造影成像(dsa)系统的导引,手动推送导丝、导管等精密器械进入血管到达病患部位后,释放药物、支架等进行诊断和治疗操作的微创手术。血管介入手术凭借其治疗效果明显、创伤面积小、术后恢复快、并发症较少等优势,成为心脑血管疾病临床治疗的主要手段。据相关数据显示,2020年以来我国血管介入治疗手术量已超过百万例,并每年以20%以上的速度增长。在这种形势下,开发血管介入手术机器人具有重大意义:1)血管介入手术机器人的应用可以避免医生长期暴露在x射线环境下,大幅降低辐射伤害;2)利用机器人的精密机械结构和定位系统,可以提高手术操作中器械旋捻、推送的精度和可控性;3)大幅降低人为因素导致手术操作的不稳定性,提高手术效率和患者治愈率,降低并发症风险。
2、现有血管介入手术机器人仍存在以下局限性:1)由于导管导丝的材料特性限制,夹持力过小易造成驱动结构打滑,导致传动失效;夹持力过大易造成导丝导管变形,影响术中使用;2)手术过程中医生安装、更换导丝导管的操作十分复杂,费时费力;3)设备只能实现一根导管和一根导丝的驱动,不能满足复杂介入手术中同时应用两根及以上导管、导丝介入的诊断和治疗操作。
技术实现思路
0、[
技术实现要素:
]
1、本发明的目的就是要解决上述的不足而提供一种用于血管介入手术的导管导丝直线驱动装置,解决了夹持力对导丝导管结构的影响,有效避免了驱动打滑造成的传动失效问题,能够实现对不同规格、不同类型导管导丝的稳定推进、撤回和有效固定夹持,且可实现同时对双导管或双导丝的操作。
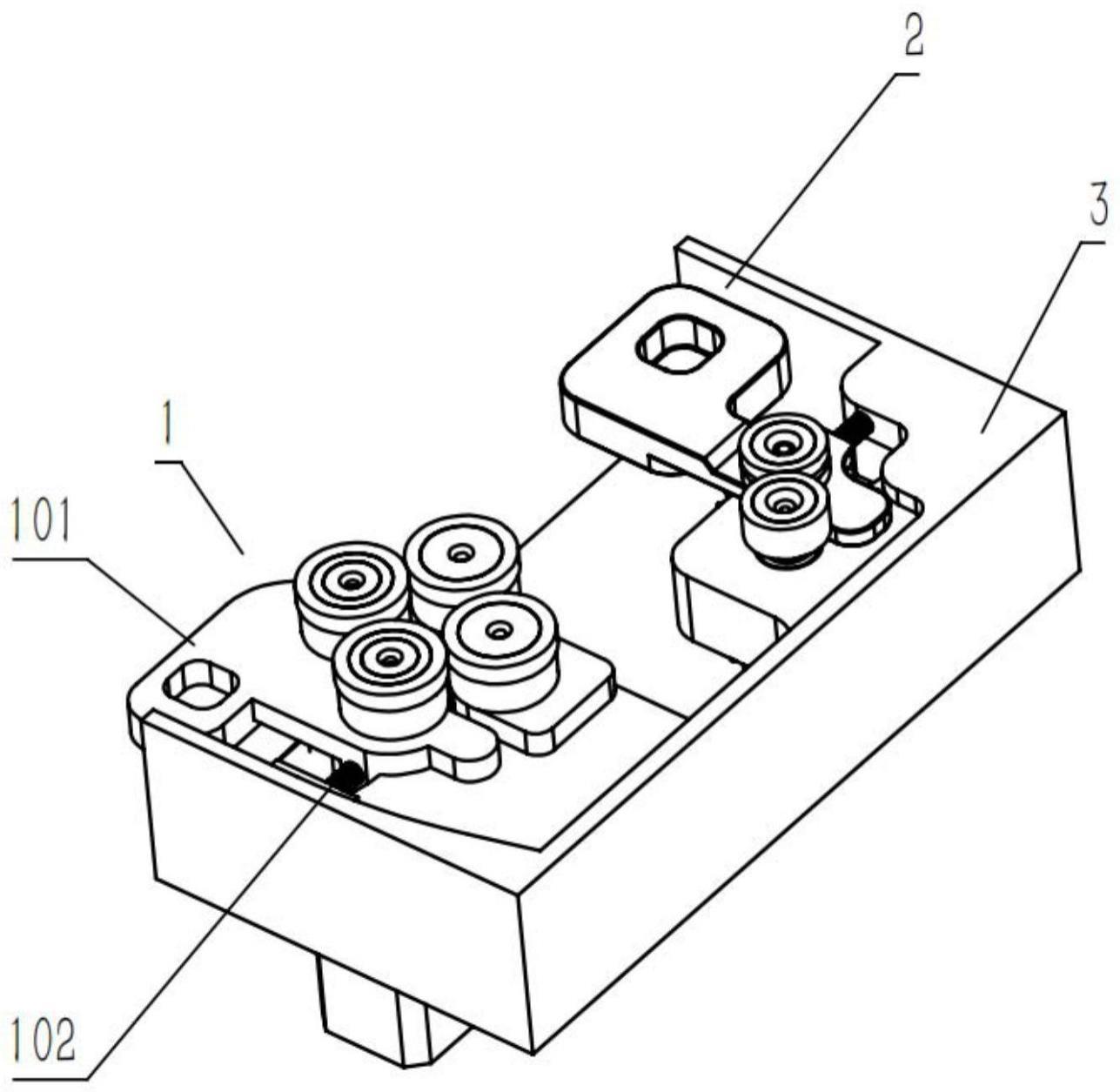
2、为实现上述目的设计一种用于血管介入手术的导管导丝直线驱动装置,包括第一驱动组件1、第二驱动组件2、底壳3和限位轨道4;所述限位轨道4上设有用于放置导丝/导管5的第一分支401和第二分支402,所述第一分支401经过第一驱动组件1,所述第二分支402经过第二驱动组件2;所述第一驱动组件1包括从动轮安装座一101、弹簧一102、主动轮轴105、圆柱齿轮-a107、圆柱齿轮-b108、主动轮组件-a111和从动轮组件-a113;所述主动轮组件-a111分为上驱动端和下驱动端两部分,所述主动轮组件-a111的上驱动端由主动轮-a114和一弹性驱动体115组成,所述主动轮组件-a111的下驱动端由主动轮-a114和橡胶套116组成;所述从动轮组件-a113也分为上驱动端和下驱动端两部分,所述从动轮组件-a113的上驱动端包括从动轮端盖118、从动轮-a117和一弹性驱动体115,所述从动轮组件-a113的下驱动端包括从动轮-a117和橡胶套116;所述主动轮组件-a111通过螺钉固定在主动轮轴105上,所述主动轮轴105安装于底壳3基座的阶梯孔上;所述从动轮组件-a113安装于从动轮安装座一101上,并通过螺钉和从动轮端盖118与从动轮安装座一101上凸出的轴连接并相对固定;所述从动轮安装座一101侧表面与底壳3侧壁上以弹簧一102相连,所述弹簧一102两端分别安装在从动轮安装座一101与底壳3侧壁上的圆孔内;所述从动轮安装座一101下端伸出一轴,所述轴安装在底壳3基座上的孔内,所述从动轮安装座一101绕轴旋转,以使主动轮组件-a111与从动轮组件-a113相互贴紧或分离;所述圆柱齿轮-a107与电机输出轴相连,并与圆柱齿轮-b108相互啮合,所述圆柱齿轮-b108与主动轮轴105锁紧固定,所述主动轮组件-a111锁紧固定于主动轮轴105上,所述主动轮组件-a111在电机的带动下旋转,并通过弹性驱动体115表面摩擦带动从动轮组件-a113旋转;所述主动轮组件-a111和从动轮组件-a113下驱动端的橡胶套116分别从两侧挤压并夹持导丝/导管5,进而带动导丝/导管5运动。
3、进一步地,所述第二驱动组件2与第一驱动组件1结构相同,所述第二驱动组件2包括从动轮安装座二201、弹簧二202、主动轮轴105、圆柱齿轮-a107、圆柱齿轮-b108、从动轮组件-b203和主动轮组件-b204,所述从动轮安装座二201绕轴旋转,以使从动轮组件-b203与主动轮组件-b204相互贴紧或分离。
4、进一步地,所述主动轮组件-b204包括主动轮-b205和圆柱橡胶套206,所述圆柱橡胶套206套于主动轮-b205外围,所述从动轮组件-b203包括从动轮-b207和带槽橡胶套208,所述带槽橡胶套208套于从动轮-b207外围,所述带槽橡胶套208上圆弧槽用于容纳多根导丝/导管5。
5、进一步地,所述从动轮安装座一101上设有一凹槽,所述凹槽用于拨动从动轮安装座一101使其绕轴逆时针旋转,进而使从动轮组件-a113与主动轮组件-a111分离;所述从动轮安装座一101手动释放后,所述从动轮组件-a113在弹簧一102回弹力的作用下复位且与主动轮组件-a111再次贴紧。
6、进一步地,所述第一驱动组件1中的主动轮组件-a111、从动轮组件-a113均设置有两对,且平行布置。
7、进一步地,所述第一驱动组件1的弹簧一102初始状态为压缩状态,所述主动轮组件-a111和从动轮组件-a113上驱动端的弹性驱动体115在弹簧一102的作用下相互贴紧,所述主动轮组件-a111被电机驱动后,依靠弹性驱动体115表面摩擦带动从动轮组件-a113旋转。
8、本发明还提供了一种用于血管介入手术的导管导丝直线驱动装置,包括第一驱动组件1、第二驱动组件2、底壳3和限位轨道4;所述限位轨道4上设有用于放置导丝/导管5的第一分支401和第二分支402,第一分支401经过第一驱动组件1,第二分支402经过第二驱动组件2;所述第一驱动组件1包括弹簧一102、带肩圆柱齿轮-a301、带肩圆柱齿轮-b302、同步带轮-a303、同步带304、同步带轮-b305、传动轴306、驱动安装座307、端面限位环308、橡胶主动轮309、橡胶被动轮310、被动轮轴311和张紧轮312;所述带肩圆柱齿轮-b302和同步带轮-a303安装在传动轴306上,所述同步带轮-b305和橡胶被动轮310安装在被动轮轴311上,所述驱动安装座307用于安装和支撑橡胶被动轮310及被动轮轴311,所述驱动安装座307通过传动轴306上端的轴肩和端面限位环308在竖直方向被限位在底壳3两侧的基座上,所述驱动安装座307侧表面与底壳3侧壁上以弹簧一102相连,所述弹簧一102两端分别安装在驱动安装座307与底壳3侧壁上的圆孔内;所述带肩圆柱齿轮-a301和橡胶主动轮309与电机输出轴相连,并在电机驱动下旋转,所述带肩圆柱齿轮-a301与带肩圆柱齿轮-b302相互啮合,并带动传动轴306旋转,进而带动同步带轮-a303旋转,所述同步带轮-a303通过同步带304带动同步带轮-b305,所述同步带轮-b305驱动被动轮轴311和其上的橡胶被动轮310旋转,所述橡胶主动轮309和橡胶被动轮310外表面裹覆弹性橡胶,以驱动导丝/导管5直线运动。
9、进一步地,所述橡胶主动轮309、橡胶被动轮310替换为一对平行布置的磁力传动轮601,所述磁力传动轮601通过电机驱动其中一个传动轴,并在排斥力的作用下另一个磁力传动轮601向相反方向旋转,进而实现非接触传动。
10、本发明同现有技术相比,具有如下优点:
11、(1)本发明提供了一种用于血管介入手术的导管导丝直线驱动装置,解决了因夹持力不足导致驱动打滑进而造成传动失效的问题,大大增加了传动稳定性;同时可以避免夹持力过大造成导丝导管形变或表面涂层脱落,影响术中使用;
12、(2)本发明使得医生进行导管导丝安装和更换时操作简单方便,且能够实现对不同规格、不同类型导管导丝的稳定推进、撤回和有效固定夹持,兼容性强;
13、(3)本发明结构简单,便于加工和安装,集合程度高,可操作性强;
14、(4)本发明能够实现同时对双导管双导丝的操作,使单台手术中无需更换导管或导丝即可完成更为复杂的介入手术操作。
- 还没有人留言评论。精彩留言会获得点赞!