操作参数确定方法、装置、设备和可读存储介质与流程
本发明涉及生物医疗领域,具体涉及一种操作参数确定方法、装置、设备和可读存储介质。
背景技术:
1、根据人体组织(比如肿瘤、结节、良性病变组织等)的性质,可以采取不同的方法进行治疗。比如,针对恶性的人体组织,可以采取切除治疗;针对良性的人体组织,可以采取药物保守治疗。但不管采取什么方法对人体组织进行治疗,均需要保证针对人体组织的操作精度。比如对人体组织采取切除治疗时,需要保证人体组织被完全切除。
2、目前,对人体组织进行操作时,通常采用人工判断的方式来确定旋切等操作的参数,导致对人体组织的操作精度还有待提高。
技术实现思路
1、有鉴于此,本发明实施方式提供了一种操作参数确定方法、装置、设备和计算机可读存储介质,确定的操作参数准确度高,进而可以提高操作精度。
2、本发明一方面提供了一种操作参数确定方法,所述方法包括:
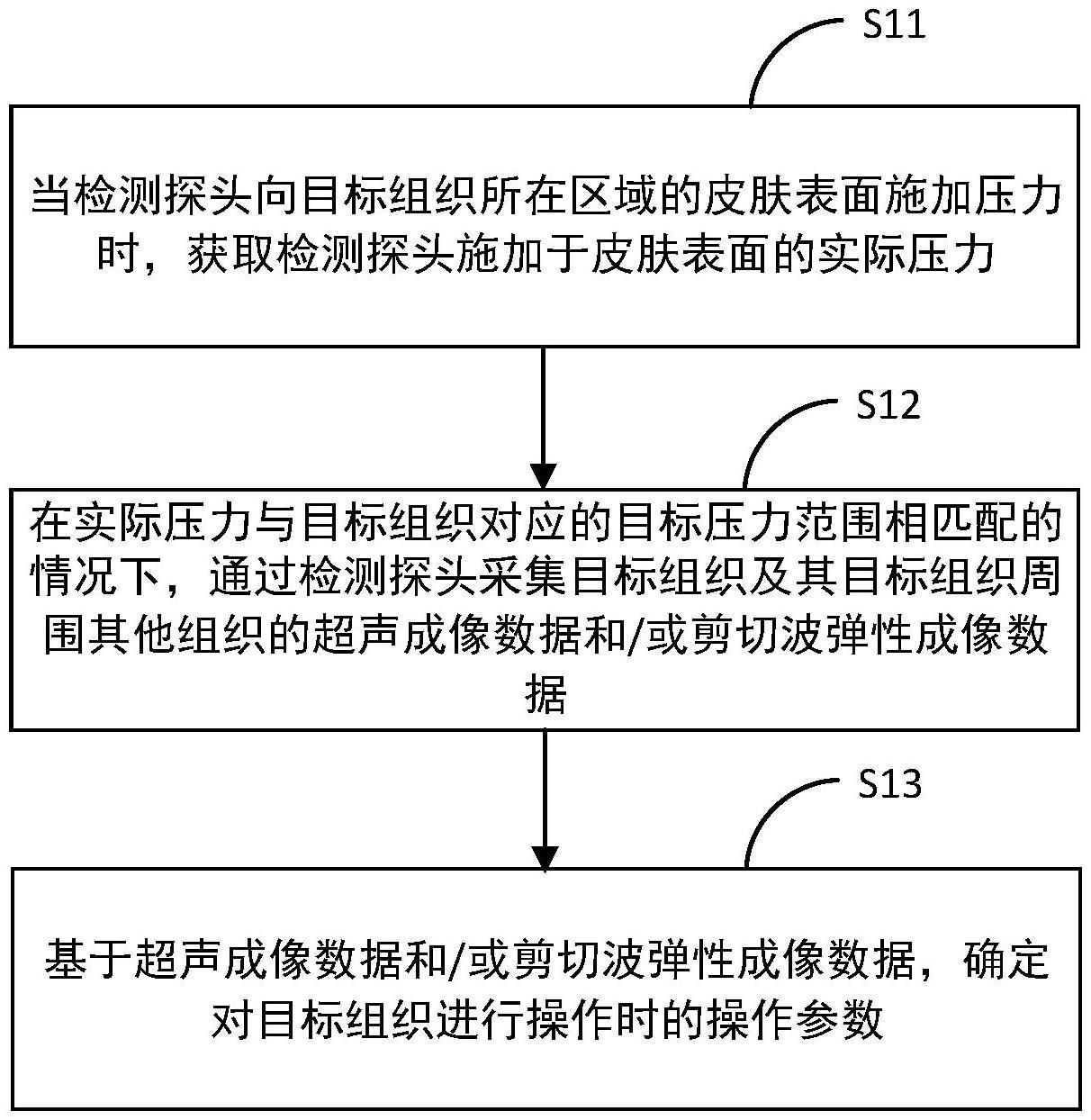
3、当检测探头向目标组织所在区域的皮肤表面施加压力时,获取所述检测探头施加于所述皮肤表面的实际压力;
4、在所述实际压力与所述目标组织对应的目标压力范围相匹配的情况下,通过所述检测探头采集所述目标组织及其周围其他组织的超声成像数据和/或剪切波弹性成像数据;及
5、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数。
6、在一些实施例中,所述方法还包括:在所述检测探头向所述皮肤表面施加压力的过程中,利用所述检测探头采集所述目标组织及其周围其他组织的准静态弹性成像数据;
7、其中,基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数,包括:基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定对所述目标组织进行操作时的操作参数。
8、在一些实施例中,在采集所述超声成像数据和/或所述剪切波弹性成像数据的过程中,所述方法还包括:
9、持续检测所述检测探头施加于所述皮肤表面的所述实际压力,在检测到所述实际压力与所述目标压力范围不相匹配的情况下,停止数据采集。
10、在一些实施例中,所述操作参数包括如下一个或多个:
11、对所述目标组织进行旋切操作时的旋切力度;
12、对所述目标组织进行旋切操作时的旋切起始位置;
13、对所述目标组织进行标记操作的目标位置;
14、对所述目标组织进行标记操作时所需的标记夹数量。
15、在一些实施例中,对所述目标组织的操作包括旋切操作,所述操作参数包括对所述目标组织进行旋切操作时的旋切力度;
16、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数,包括:
17、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定所述目标组织不同位置处的软硬程度;
18、根据软硬程度和旋切力度的对应关系,确定对所述目标组织不同位置处的组织进行旋切操作时的旋切力度。
19、在一些实施例中,对所述目标组织的操作包括旋切操作,所述操作参数包括对所述目标组织进行旋切操作时的旋切起始位置;
20、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数,包括:
21、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定旋切刀从所述皮肤表面到达所述目标组织边缘处的各个备选起始位置的旋切力度,其中,所述旋切力度为所述旋切刀穿过所述皮肤表面和所述备选起始位置之间的关联组织时,所需的力度;
22、基于所述超声成像数据,确定旋切刀从所述皮肤表面到达所述目标组织边缘处的各个备选起始位置的损伤程度,其中,所述损伤程度为所述旋切刀穿过所述皮肤表面和所述备选起始位置之间的关联组织时,对所述关联组织的损伤程度;
23、根据所述各个备选起始位置的旋切力度和/或损伤程度,确定所述各个备选起始位置的旋切代价;
24、选择旋切代价最小的备选起始位置,作为对所述目标组织进行旋切操作时的旋切起始位置。
25、在一些实施例中,对所述目标组织的操作包括对所述目标组织进行标记操作,所述操作参数包括对所述目标组织进行标记操作的目标位置;
26、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数,包括:
27、基于所述超声成像数据和/或所述剪切波弹性成像数据,确定所述目标组织不同位置处的软硬程度,并将软硬程度超过阈值的位置,确定为所述目标组织所在区域待进行标记操作的第一备选位置;
28、基于所述超声成像数据和/或所述剪切波弹性成像数据确定所述目标组织边缘轮廓的形状特征,并根据所述目标组织边缘轮廓的形状特征,确定所述目标组织所在区域待进行标记操作的第二备选位置;
29、基于所述第一备选位置和所述第二备选位置,确定所述目标位置。
30、在一些实施例中,基于所述超声成像数据和/或所述剪切波弹性成像数据,确定所述目标组织不同位置处的软硬程度,包括:
31、基于所述超声成像数据,得到所述目标组织不同位置处的物质成分和/或致密度;
32、基于所述剪切波弹性成像数据,得到所述目标组织不同位置处的绝对弹性;
33、基于所述目标组织各位置处的绝对弹性、物质成分和致密度中的至少一个,确定所述目标组织在该位置处的软硬程度,以得到所述目标不同位置处的软硬程度。
34、在一些实施例中,对所述目标组织的操作包括旋切操作,所述操作参数包括对所述目标组织进行旋切操作时的旋切力度;
35、所述基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定对所述目标组织进行操作时的操作参数,包括:
36、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定所述目标组织不同位置处的软硬程度;
37、根据软硬程度和旋切力度的对应关系,确定对所述目标组织不同位置处的组织进行旋切操作时的旋切力度。
38、在一些实施例中,对所述目标组织的操作包括旋切操作,所述操作参数包括对所述目标组织进行旋切操作时的旋切起始位置;
39、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据,确定对所述目标组织进行操作时的操作参数,包括:
40、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定旋切刀从所述皮肤表面达到所述目标组织边缘处的各个备选起始位置的旋切力度,其中,所述旋切力度为所述旋切刀穿过所述皮肤表面和所述备选起始位置之间的关联组织时,所需的力度;
41、基于所述超声成像数据,确定旋切刀从所述皮肤表面达到所述目标组织边缘处的所述各个备选起始位置的损伤程度,其中,所述损伤程度为所述旋切刀穿过所述皮肤表面和所述备选起始位置之间的所述关联组织时,对所述关联组织的损伤程度;
42、根据所述各个备选起始位置的旋切力度和/或损伤程度,确定所述各个备选起始位置的旋切代价;
43、选择旋切代价最小的备选起始位置,作为对所述目标组织进行旋切操作时的旋切起始位置。
44、在一些实施例中,对所述目标组织的操作包括对所述目标组织进行标记操作,所述操作参数包括对所述目标组织进行标记操作的目标位置;
45、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定对所述目标组织进行操作时的操作参数,包括:
46、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定所述目标组织不同位置处的软硬程度,并将软硬程度超过阈值的位置,确定为所述目标组织所在区域待进行标记操作的第一备选位置;
47、基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据中的一个或者多个,确定所述目标组织边缘轮廓的形状特征,并根据所述目标组织边缘轮廓的形状特征确定所述目标组织所在区域待进行标记操作的第二备选位置;
48、根据所述第一备选位置和所述第二备选位置,确定所述目标位置。
49、在一些实施例中,基于所述准静态弹性成像数据、所述剪切波弹性成像数据和所述超声成像数据,确定所述目标组织不同位置处的软硬程度,包括:
50、基于所述准静态弹性成像数据和所述剪切波弹性成像数据,得到目标组织的弹性分布数据,其中,所述弹性分布数据表征所述目标组织不同位置处的弹性;
51、基于所述超声成像数据,得到所述目标组织的致密度分布数据和/或物质成分分布数据;
52、基于所述弹性分布数据、所述物质成分数据以及所述致密度分布数据中的一个或者多个,确定所述目标组织不同位置处的软硬程度。
53、本发明另一方面还提供了一种操作参数确定装置,所述装置包括:
54、获取模块,用于在检测探头位于目标组织所在区域的皮肤表面时,获取所述检测探头施加于所述皮肤表面的实际压力;
55、获取模块,用于当检测探头向目标组织所在区域的皮肤表面施加压力时,获取所述检测探头施加于所述皮肤表面的实际压力;
56、采集模块,用于在所述实际压力与所述目标组织对应的目标压力范围相匹配的情况下,通过所述检测探头采集所述目标组织及其周围其他组织的超声成像数据和/或剪切波弹性成像数据;及
57、确定模块,用于基于所述超声成像数据和/或所述剪切波弹性成像数据,确定对所述目标组织进行操作时的操作参数。
58、本发明另一方面还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器执行时,实现如上所述的方法。
59、本发明另一方面还提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器用于存储计算机程序,所述计算机程序被所述处理器执行时,实现如上所述的方法。
60、在本技术一些实施例的技术方案中,在对目标组织进行操作时,将检测探头向皮肤表面施加的实际压力,与目标组织对应的目标压力范围进行匹配,在实际压力与目标压力范围相匹配的情况下,通过检测探头采集目标组织及其周围其他组织的超声成像数据和/或剪切波弹性成像数据,并基于超声成像数据和/或剪切波弹性成像数据,确定对目标组织进行操作时的操作参数。通过本技术,一方面,当检测探头和皮肤表面之间的压力处于稳定范围时才采集超声成像数据和/或剪切波弹性成像数据,实现了基于统一标准进行数据采集,所以采集到的数据一致性高、稳定性好,进而,基于超声成像数据和/或剪切波弹性成像数据确定的操作参数可以更加准确,使得针对目标组织的操作精度高;另一方面,相比现有技术中的仅依靠人工判断的方式来确定组织的操作参数,本技术基于超声成像数据和/或剪切波弹性成像数据,来确定对目标组织进行操作时的操作参数,所以操作参数的准确度更高。
- 还没有人留言评论。精彩留言会获得点赞!