一种肘-腕关节三自由度等速肌力评估及康复平台的制作方法
本发明涉及等速肌力评估及关节康复器械,尤其涉及一种肘-腕关节三自由度等速肌力评估及康复平台。
背景技术:
1、等速肌力仪是评估和康复具有运动功能障碍人群的装置,同时也可以辅助运动员训练,实现肌力增强。等速肌力仪具有等速、等长、等张、向心、离心训练模式,其中等速训练模式下可保证关节康复安全性,提高肌力评估准确性。常用的测试参数有:峰力矩,峰力矩角度,平均功率,肌肉总作功等。
2、传统等速肌力仪采用单关节单自由度评估和康复策略,针对人体不同关节运动,需要加装机械适配器,实现单一范式的评估和康复运动。
3、针对人体多关节康复训练,已有刚性外骨骼和绳驱外骨骼等多自由度康复机器人的方案。刚性外骨骼康复机器人是指电机输出通过齿轮、连杆等刚性零件将力矩传递到人体关节上,实现辅助康复功能。此种方式需要精准调节人体关节轴线与电机轴线同轴度,若失配则会引起人体不适,甚至加深关节伤害;绳驱外骨骼则是通过绳、带、链传动实现电机力矩的传递,该方式可有效减小末端关节质量,并且补偿人机关节失配偏差,但传力精度较低。
4、因此,本领域的技术人员致力于开发一种肘-腕关节三自由度等速肌力评估及康复平台,以解决上述问题。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是:传统的单关节单自由度等速仪康复和评估范式单一,更换机械适配器过程繁琐,且难以完全限制其他关节代偿,康复效率和评估准确率较低。同时,人体多关节刚性外骨骼康复机器人,大部分只面向康复功能,缺少肌力评估传感器,由于刚性连接容易导致人机关节匹配精度不高,容易导致二次伤害,且多关节重力补偿困难,检测精度下降。另外,针对人体多关节绳驱外骨骼康复机器人,传动方式本身会导致测量精度下降,且绳、带、链等零件需要定期更换,使用寿命不高。
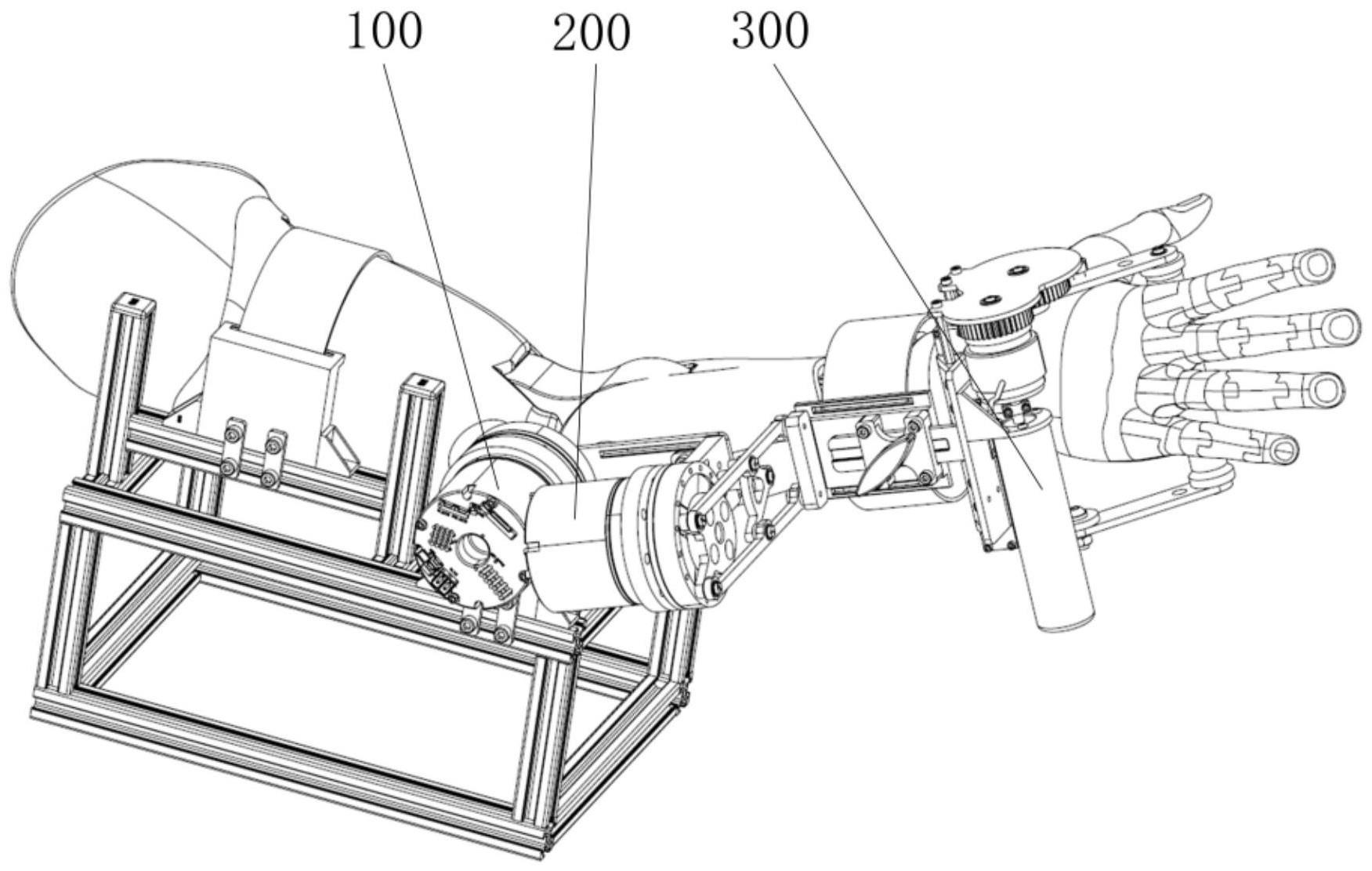
2、为实现以上目的,本发明提供了一种肘-腕关节三自由度等速肌力评估及康复平台,其特征在于,包括肘部屈伸系统、肘部内外旋系统和腕部屈展系统;所述肘部屈伸系统与所述肘部内外旋系统固定连接,所述肘部内外旋系统与所述腕部屈展系统固定连接;所述肘部屈伸系统包括第一伺服电机(100),所述肘部内外旋系统包括第二伺服电机(200),所述腕部屈展系统包括第三伺服电机(300);所述第一伺服电机(100)用以实现肘关节屈伸运动,所述第二伺服电机(200)用以实现肘关节内外旋运动,所述第三伺服电机(300)用以实现腕关节屈展运动。
3、进一步地,所述肘部屈伸系统还包括第一伺服电机基座(101)、第一法兰(102)、第一静态扭矩传感器(103)、绑带固定基座(104)、大臂绑带(105)、型材基座(106)和角码(107);所述第一伺服电机(100)与第一伺服电机基座(101)固定连接,所述第一伺服电机基座(101)与所述角码(107)固定连接,所述角码(107)与所述型材基座(106)固定连接;所述第一法兰(102)的内圈与所述第一伺服电机(100)的动力输出端固定连接,所述第一法兰(102)的外圈与所述第一静态扭矩传感器(103)固定连接;所述绑带固定基座(104)与所述型材基座(106)固定连接,所述大臂绑带(105)安装在所述绑带固定基座(104)上。
4、进一步地,所述绑带固定基座(104)通过螺栓固定安装在所述型材基座(106)上,所述绑带固定基座(104)可在所述型材基座(106)上根据人体大臂的区别调整位置,满足不同人群的测试和康复需求。
5、进一步地,所述肘部内外旋系统还包括第二伺服电机基座(201)、第二法兰(202)、第二静态扭矩传感器(203)、输出盘(204)、60度中间连杆固定轴(205)、第一连杆(206)、60度中间连杆(207)、v型输出盘(208)和第二连杆(209);所述第二伺服电机基座(201)的一端与所述第二伺服电机(200)固定连接,另一端与所述输出盘(204)的一端固定连接,且所述第二伺服电机基座(201)与所述输出盘(204)之间成90度角;所述输出盘(204)的另一端与所述肘部屈伸系统固定连接;所述第二法兰(202)的内圈与所述第二伺服电机(200)的动力输出端固定连接,所述第二法兰(202)的外圈与所述第二静态扭矩传感器(203)固定连接;所述v型输出盘(208)的一端与所述第二静态扭矩传感器(203)固定连接,另外两端分别与所述第一连杆(206)和所述第二连杆(209)铰接;所述60度中间连杆(207)的一端与所述60度中间连杆固定轴(205)铰接,另外两端分别与所述第一连杆(206)和所述第二连杆(209)铰接,所述60度中间连杆(207)、所述第一连杆(206)、所述第二连杆(209)和所述v型输出盘(208)形成一个平行四连杆系统;所述60度中间连杆固定轴(205)固定在所述第二伺服电机基座(201)上,所述60度中间连杆(207)能够绕所述60度中间连杆固定轴(205)的轴线旋转运动。
6、进一步地,所述第二伺服电机基座(201)与所述输出盘(204)连接的一端设有角件,通过所述角件和螺栓保证两者的垂直度和运动的稳定性。
7、进一步地,所述腕部屈展系统还包括d型联轴器(301)、第三静态扭矩传感器(302)、法兰盘输出轴(303)、小齿轮(304)、大齿轮(305)、挡板(306)、万向球螺栓(307)、腕部小臂连接件(308)、小臂基座(309)、腕部连接杆(310)、小臂调节固定件(311)、小臂绑带(312)、腕关节基座(313)、手拧一字螺钉(314)、长基座(315)、第三电机基座(316)、握把连杆(317)、握把(318)、腕部连接轴(319)和压紧片(320);所述腕部小臂连接件(308)与所述肘部内外旋系统铰接连接,同时与所述小臂基座(309)固定连接;所述小臂基座(309)上固定有所述小臂调节固定件(311),所述小臂调节固定件(311)上设有所述手拧一字螺钉(314),用于调整和固定所述腕部连接杆(310);所述腕部连接杆(310)的一端可在所述小臂基座(309)和所述小臂调节固定件(311)之间滑动,另一端与所述腕关节基座(313)固定连接;所述腕关节基座(313)上固定安装有所述长基座(315),所述长基座(315)上固定安装有所述第三电机基座(316),所述第三电机基座(316)与所述第三伺服电机(300)固定连接;所述d型联轴器(301)的一端与所述第三伺服电机(300)固定连接,另一端与所述第三静态扭矩传感器(302)固定连接;所述第三静态扭矩传感器(302)与所述法兰盘输出轴(303)固定连接;所述法兰盘输出轴(303)上设有键槽,与所述小齿轮(304)通过键传动进行配合;所述小齿轮(304)与所述大齿轮(305)相啮合;所述大齿轮(305)与所述腕部连接轴(319)通过键传动进行配合,同时与所述握把连杆(317)通过键进行传动;所述握把连杆(317)与所述握把(318)固定连接;所述压紧片(320)与所述d型联轴器(301)固定连接;所述挡板(306)置于所述小齿轮(304)和所述大齿轮(305)的外侧,通过所述万向球螺栓(307)和铜柱进行固定,用于限制所述腕部连接轴(319)和所述法兰盘输出轴(303)的轴向运动;所述铜柱置于所述小齿轮(304)和所述大齿轮(305)的边缘处,不与两个齿轮发生干涉,所述铜柱的两端分别与所述挡板(306)和所述腕关节基座(313)固定连接。
8、进一步地,所述压紧片(320)通过螺钉与所述d型联轴器(301)固定连接,锁死输出的d型轴,保证传动精度。
9、进一步地,所述腕部连接杆(310)、所述小臂调节固定件(311)和手拧一字螺钉(314)形成长度调整组件,通过松紧所述手拧一字螺钉(314)可实现所述小臂调节固定件(311)的移动,以满足不同小臂长度的受试者使用。
10、进一步地,所述腕部连接杆(310)上刻有长度值,移动所述小臂调节固定件(311)时可直观测量小臂伸长长度。
11、进一步地,所述握把连杆(317)与所述握把(318)通过螺钉固定连接;所述腕部小臂连接件(308)与所述小臂基座(309)通过螺钉固定连接;所述腕部连接杆(310)与所述腕关节基座(313)通过螺栓固定连接。
12、与传统方法和装置相比,本发明具备以下有益效果:
13、本发明为肘-腕关节三自由度评估与康复平台,相比于单关节单自由度传统等速肌力仪设备,解决了评估与康复范式单一的问题,且能够通过多关节扭矩传感器量化肌肉代偿情况,提升了康复评估的精度。
14、本发明创造性的采用了多自由度肌力评估技术,通过使用三个伺服电机与三个静态力矩传感器,可实现精准的等速控制,且三自由度的测量范式,可准确测量手臂肌肉代偿情况,提高了肌力评估的精度与运动康复效率,填补了多关节肌力评估与康复范式的空白。电机输出端连有静态力矩传感器,可实时记录关节肌肉扭矩大小,进行精确的肌力评估。由于采用三自由度串联方案,可扩展关节运动范式。
15、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
- 还没有人留言评论。精彩留言会获得点赞!