手术坐标系的配准方法、装置和存储介质与流程
本技术涉及医疗器械领域,特别是涉及一种手术坐标系的配准方法、装置和存储介质。
背景技术:
1、脊柱手术包括创伤、退变、肿瘤以及畸形,需要对脊柱阶段进行置钉等操作。但是由于脊柱的特殊性,周围分布着神经与血管,所以需要置钉的精度非常高。
2、创伤手术中包括骨盆和下肢的骨折,特别是骨盆骶髂关节手术需要保证螺钉不穿入进入骶孔中,但是手术当中往往有软组织,排泄物等遮挡,所以需要多次去找骶孔的位置,而且不能很清晰地看到。医生置入螺钉的时候就依赖经验或者其他专门器械。
3、对于执行精度要求特别高的手术,可以在术前的三维ct(电子计算机断层扫描)图像进行规划,并指导手术机械臂的运动,能很好地保证术中执行精度。其中,需要在术中配准ct坐标系和机械臂基坐标系,如何快速高效地进行配准具有重要意义。
4、在一种现有的配准方法中,首先是在术中通过c臂(x光机)拍摄x-ray(x射线)图像,然后确定c臂成像系统的成像参数,以及在x-ray图像上确定至少三个解剖点,再基于c臂成像系统的成像参数和上述至少三个解剖点,得到机械臂基坐标系和ct坐标系之间的粗配准关系,最后通过精配准手段进行配准关系校正,得到两者之间的精配准关系。其中,粗配准关系需要通过人工参与得到。首先是在x-ray图像中标记至少三个解剖点,然后需要医生不断观察ct图像,在ct图像中确定出至少三个解剖点对应的空间位置,该过程需要医生具有一定程度的操作经验,且在ct图像中较为精准地确定三个解剖点对应的空间位置需要一定时间,从而导致了整个配准流程耗时较长、效率较低。
5、针对相关技术中ct坐标系和机械臂基坐标系之间的配准流程耗时较长、效率较低的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本发明中提供了一种手术坐标系的配准方法、装置和存储介质,以解决相关技术中ct坐标系和机械臂基坐标系之间的配准流程耗时较长、效率较低的问题。
2、第一个方面,在本发明中提供了一种手术坐标系的配准方法,所述配准方法包括:
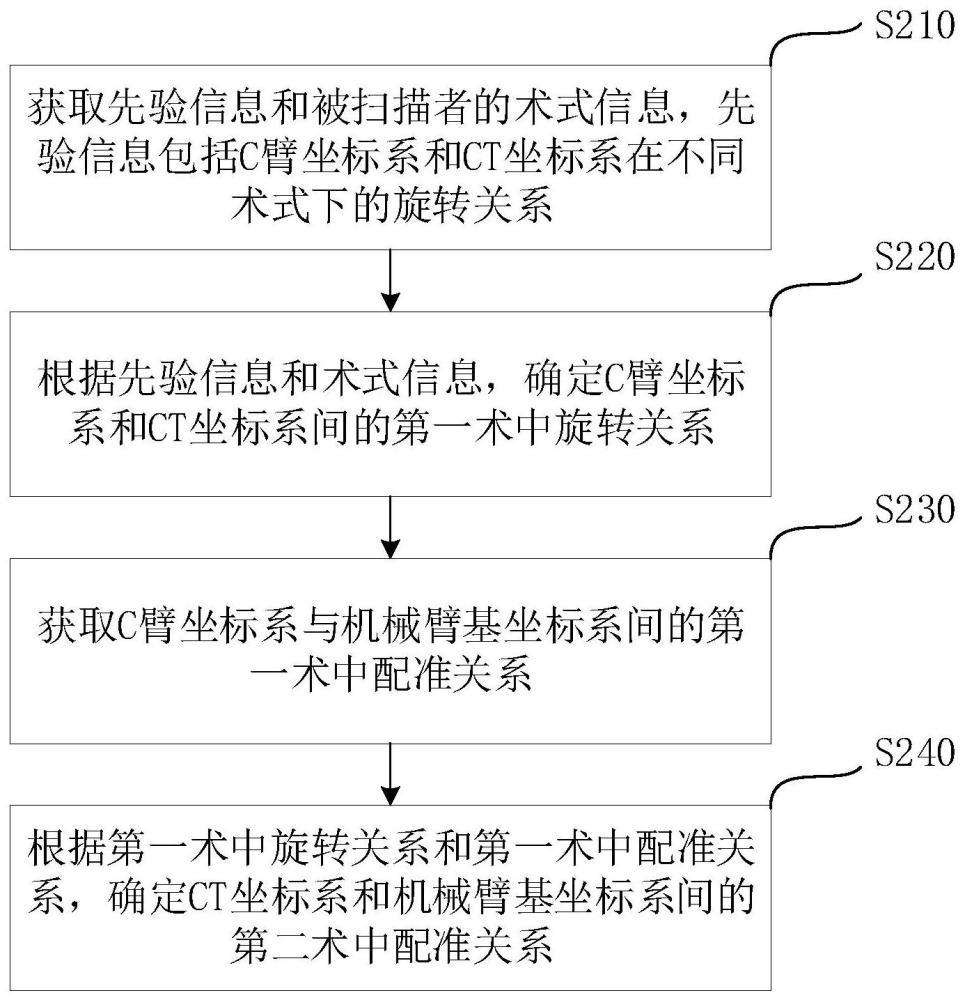
3、获取先验信息和被扫描者的术式信息,所述先验信息包括c臂坐标系和ct坐标系在不同术式下的旋转关系;
4、根据所述先验信息和所述术式信息,确定所述c臂坐标系和所述ct坐标系间的第一术中旋转关系;
5、获取所述c臂坐标系与机械臂基坐标系间的第一术中配准关系;
6、根据所述第一术中旋转关系和所述第一术中配准关系,确定所述ct坐标系和所述机械臂基坐标系间的第二术中配准关系。
7、在其中的一些实施例中,所述根据所述第一术中旋转关系和所述第一术中配准关系,确定所述ct坐标系和所述机械臂基坐标系间的第二术中配准关系包括:
8、获取成像于所述c臂坐标系的x-ray图像和成像于所述ct坐标系的三维ct图像;
9、根据所述x-ray图像、所述三维ct图像、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系。
10、在其中的一些实施例中,所述根据所述x-ray图像、所述三维ct图像、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系包括:
11、在所述被扫描者的目标手术区域中确定解剖点;
12、确定所述解剖点在所述三维ct图像中的第一坐标,以及确定所述解剖点在所述x-ray图像中的第二坐标;
13、根据所述第一坐标、所述第二坐标、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系。
14、在其中的一些实施例中,所述根据所述第一坐标、所述第二坐标、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系包括:
15、根据所述第一坐标、所述第二坐标和所述第一术中旋转关系,确定所述c臂坐标系和所述ct坐标系间的第一术中平移关系;
16、根据所述第一术中旋转关系和所述第一术中平移关系,确定所述c臂坐标系和所述ct坐标系间的第三术中配准关系;
17、根据所述第三术中配准关系和所述第一术中配准关系,确定所述第二术中配准关系。
18、在其中的一些实施例中,所述根据所述第一坐标、所述第二坐标、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系包括:
19、根据所述第一术中旋转关系和所述第一术中配准关系,确定所述ct坐标系和所述机械臂基坐标系间的第二术中旋转关系;
20、根据所述第二坐标和所述第一术中配准关系,确定所述解剖点在所述机械臂基坐标系中的第三坐标;
21、根据所述第一坐标、所述第三坐标和所述第二术中旋转关系,确定所述ct坐标系和所述机械臂基坐标系间的第二术中平移关系;
22、根据所述第二术中旋转关系和所述第二术中平移关系,确定所述第二术中配准关系。
23、在其中的一些实施例中,所述确定所述解剖点在三维ct图像中的第一坐标,以及确定所述解剖点在所述x-ray图像中的第二坐标包括:
24、在所述三维ct图像中确定所述第一坐标;
25、通过所述第一术中旋转关系对所述三维ct图像进行投影,得到二维虚拟图像;
26、调整所述三维ct图像,直至所述二维虚拟图像与所述x-ray图像重合;
27、根据所述第一坐标在所述二维虚拟图像的投影点,在所述x-ray图像中确定所述第二坐标。
28、在其中的一些实施例中,所述根据所述x-ray图像、所述三维ct图像、所述第一术中旋转关系和所述第一术中配准关系,确定所述第二术中配准关系包括:
29、通过所述第一术中旋转关系对所述三维ct图像进行投影,得到二维虚拟图像;
30、调整所述三维ct图像,直至所述二维虚拟图像与所述x-ray图像重合;
31、根据所述三维ct图像的平移变化量,确定所述c臂坐标系与所述ct坐标系间的第一术中平移关系;
32、根据所述第一术中旋转关系、所述第一术中平移关系和所述第一术中配准关系,确定所述第二术中配准关系。
33、在其中的一些实施例中,所述配准方法在确定所述第二术中配准关系之前还包括:
34、根据调整后的所述三维ct图像,校正所述第一术中旋转关系。
35、第二个方面,在本发明中提供了一种手术坐标系的配准装置,所述配准装置包括:
36、第一获取模块,用于获取先验信息和被扫描者的术式信息,所述先验信息包括c臂坐标系和ct坐标系在不同术式下的旋转关系;
37、第一确定模块,用于根据所述先验信息和所述术式信息,确定所述c臂坐标系和所述ct坐标系间的第一术中旋转关系;
38、第二获取模块,用于获取所述c臂坐标系与机械臂基坐标系间的第一术中配准关系;
39、第二确定模块,用于根据所述第一术中旋转关系和所述第一术中配准关系,确定所述ct坐标系和所述机械臂基坐标系间的第二术中配准关系。
40、第三个方面,在本发明中提供了一种电子装置,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一个方面所述的手术坐标系的配准方法。
41、第四个方面,在本发明中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的手术坐标系的配准方法。
42、与相关技术相比,在本发明中提供的手术坐标系的配准方法、装置和存储介质,只需要在术中标定测量c臂坐标系和所述ct坐标系间的平移关系,或是ct坐标系和所述机械臂基坐标系间的平移关系,便可以得到ct坐标系和所述机械臂基坐标系间的配准关系。因此,本发明中提供的手术坐标系的配准方法,在术中需要标定测量的关系量更少,进而配准流程耗时更短,效率更高。解决相关技术中ct坐标系和机械臂基坐标系之间的配准流程耗时较长、效率较低的问题。
43、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!