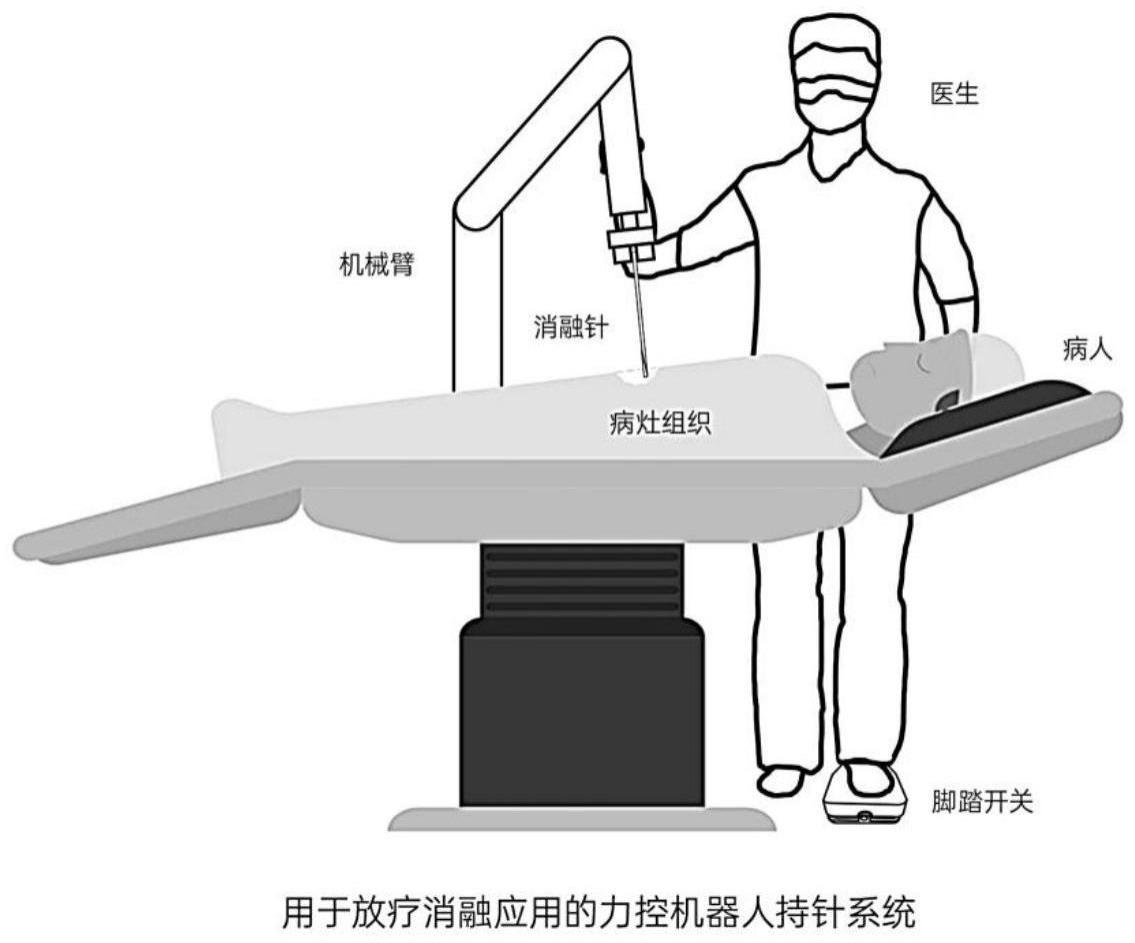
用于放疗消融应用的力控机器人持针控制方法及系统与流程
本公开涉及机械臂控制,尤其涉及一种用于放疗消融应用的力控机器人持针控制方法及系统。
背景技术:
1、在肿瘤放疗消融手术应用中,医生需要在特定的放疗区域中长时间(约20分钟)把持消融针。由于术中需要长时间进行动手操作,导致医师非常容易疲劳,出现手抖不稳的现象,影响手术效果。同时,目前大部分的消融操作需要在超高压、超低温环境下进行,医生手持操作时不安全。而且消融过程中需要多针的重复定位,医生需要凭借个人经验进行人工手动调整消融针位置,其定位准确性受个人经验和能力影响。目前现有的解决方案是采用机械式的固定架,但是机械式的固定架由于其自身特点,难以在稳定性与操作的灵活性上达到医生的理想要求,具体原因如下:1)采用强度高、重量大的设备时,将导致操作不方便;2)采用轻量化、易操作的设备时,存在强度不够的问题,达不到手术要求。
2、有鉴于此,本发明提出一种基于机器人力控技术的的手术持针系统。基于力控制方案,可以让医生进行轻便的拖动操作,同时也实现高稳定性与高负载能力。
技术实现思路
1、有鉴于此,本公开实施例提供一种用于放疗消融应用的力控机器人持针控制方法及系统,以至少部分解决现有技术中存在的问题。
2、第一方面,本公开实施例提供了一种用于放疗消融应用的力控机器人持针控制方法,包括:
3、获取脚踏开关的状态,以便于切换机械臂的高刚性定位模式和柔性拖动模式;
4、当释放脚踏开关时,系统进入高刚性的定位模式,机器人保持设定姿态不变,进行持针消融操作;
5、当脚踏开关处于踩下状态时,系统进入柔性拖动模式,医生用极小的力反向驱动机器人;
6、所述柔性拖动模式的实现方法包括:1)通过重力补偿和惯性补偿策略,降低系统的拖动力,进而提高系统反向驱动的灵敏度;2)通过高性能并行矢量控制运算处理技术,使得系统运动轨迹平滑。
7、根据本公开实施例的一种具体实现方式,所述获取脚踏开关的状态,以便于切换机械臂的高刚性定位模式和柔性拖动模式,包括:
8、机械臂系统电机部分集成力矩传感器,电机采用力矩控制模式进行实时转矩控制;基于力控制方案,让医生进行轻便的拖动操作,同时也实现高稳定性与高负载能力,系统包括两种工作模式:
9、1)高刚性的定位模式:
10、力控持针机械臂末端夹持消融针,进入高刚性定位模式后,机器人始终保持设定姿态不变,在不受环境扰动影响下,代替医生完成病灶组织消融任务;
11、2)柔性拖动模式:
12、采用高灵敏度的主动反驱控制方式,使得机器人在拖动模式下,表现的非常轻盈,医生用极小的力反向驱动机器人,有利于医生精准定位。
13、根据本公开实施例的一种具体实现方式,所述获取脚踏开关的状态,以便于切换机械臂的高刚性定位模式和柔性拖动模式,还包括:
14、系统搭载一个脚踏开关,脚踏开关与机械臂相连接,用于系统工作模式切换。切换方式包括:
15、1)当释放脚踏开关时,系统进入高刚性的定位模式,机器人保持设定姿态不变,且不受环境扰动影响;
16、2)当踩下脚踏开关时,系统进入柔性拖动模式,医生用极小的力反向驱动机器人。
17、根据本公开实施例的一种具体实现方式,还包括:
18、获取系统的动力参数θ之后,计算机械臂的重力矩g(q);
19、控制机器人输出和重力矩相等的驱动力矩τc,即g(q)=τc;
20、构建机械臂的动力学方程为:
21、
22、其中,q表示位置,表示速度,表示加速度,表示系统运动中的惯量,表示系统运动中的离心力,j为机械臂的雅克比矩阵,f为外力。
23、根据本公开实施例的一种具体实现方式,还包括:
24、在已有重力补偿的情况下,构建计算公式:
25、
26、控制机器人再输出一部分驱动力矩,使得用户推动机械臂的效果等同于推动一个小质量的m(q)。且由于低表观惯量,机械臂和组织的接触力也相应会更小。通过以下两个方程来描述惯性补偿过程:
27、
28、
29、进而联立得到惯性补偿力矩τcomp为:
30、τcomp=(m(q)m(q)-1-in)jtf
31、外力矩τext由当前关节力矩传感器读数和机械臂位置参数估算:
32、
33、于是在重力补偿加惯性补偿的控制中,驱动力矩τc为:
34、τc=g(q)+(m(q)m(q)-1-in)τext
35、其中,τsm表示力矩传感器获得的电机转矩,in表示惯性矩阵。
36、根据本公开实施例的一种具体实现方式,还包括:
37、构建并行矢量控制器,采用将系统分块的方式,将不同的模块用不同的处理器分别计算出不同的成分;
38、将复杂的动力控制进行线性矢量分离,利用线性方法,动态的调节力控效果,使用控制器直接控制肿瘤消融系统中电机的转动力矩,对重力与惯性进行独立控制。
39、根据本公开实施例的一种具体实现方式,还包括:
40、构建肿瘤消融系统的动力学方程为:
41、
42、其中,q表示位置,表示速度;表示加速度,表示系统运动中的惯量,表示系统运动中的离心力,g(q)系统运动中的重力补偿,τsm表示力矩传感器获得的电机转矩;τext表示系统外力转矩,j为机械臂的雅克比矩阵,f为外力;
43、采用线性矢量分离方式,将肿瘤消融系统的动力学方程转化为矩阵和向量相乘的形式:
44、
45、其中,y表示系统的运动学参数矩阵,根据系统的运动学姿态获得;θ表示系统的动力学参数向量,根据系统的质量、重心获得;
46、对于力控的矢量控制器,在计算时,将y进行分块操作处理,矢量控制器由重力补偿部分控制器g和惯量部分控制器m组成,分块操作运算如下:
47、y=yg+ym。
48、根据本公开实施例的一种具体实现方式,还包括:
49、采用并行计算的方式,在系统中设置g和m这2个控制器、以及一个用于测算θ的观测器;
50、在矢量控制器实现过程中,先利用多核处理器,使每个处理器分别计算一个控制变量,经过运算后,系统最终输出这各个部分的加权求合计算结果,即为控制器输出的力矩τ,计算公式如下:
51、τ=τg*wg+τm*wm
52、其中,τg表示重力补偿部分控制器的输出力矩,wg表示重力补偿部分控制器的控制变量,τm表示惯量部分控制器的输出力矩,wm表示惯量部分控制器的控制变量。
53、根据本公开实施例的一种具体实现方式,还包括:
54、通过调节wg和wm的值,实现对各个动力学性能参数的相对独立的调节;
55、当系统处于低速运行时,加速项对系统的影响小,定义wg和wm的值为零,或是将wg和wm的计算关闭;
56、当系统处于高速运行时,使用惯性补偿、转动平衡以及重力补偿进行机械臂控制,提高机械臂的操控性以及稳定性。
57、第二方面,本公开实施例提供了一种用于放疗消融应用的力控机器人持针控制系统,包括:
58、机器臂,所述机械臂具有多个关节,且每个关节上均有力矩传感器。
59、实时转矩控制器,所述控制器与机械臂上每个关节的伺服系统直接相连,直接控制电机的转矩,对机械臂进行力控制;
60、脚踏开关,所述脚踏开关与所述机械臂相连,通过踩踏脚踏开关,实现系统的柔性拖动模式和高刚性定位模式的切换,进而实现第一方面或第一方面任一实现方式所述的方法。
61、第三方面,本公开实施例还提供了一种非暂态计算机可读存储介质,该非暂态计算机可读存储介质存储计算机指令,该计算机指令用于使该计算机执行前述第一方面或第一方面的任一实现方式中的用于放疗消融应用的力控机器人持针控制方法。
62、第四方面,本公开实施例还提供了一种计算机程序产品,该计算机程序产品包括存储在非暂态计算机可读存储介质上的计算程序,该计算机程序包括程序指令,当该程序指令被计算机执行时,使该计算机执行前述第一方面或第一方面的任一实现方式中的用于放疗消融应用的力控机器人持针控制方法。
63、本公开实施例中的用于放疗消融应用的力控机器人持针控制方案,包括:获取脚踏开关的状态,以便于切换机械臂的高刚性定位模式和柔性拖动模式;当释放脚踏开关时,系统进入高刚性的定位模式,机器人保持设定姿态不变,进行持针消融操作;当脚踏开关处于踩下状态时,系统进入柔性拖动模式,医生用极小的力反向驱动机器人;所述柔性拖动模式的实现方法包括:1)通过重力补偿和惯性补偿策略,降低系统的拖动力,进而提高系统反向驱动的灵敏度;2)通过高性能并行矢量控制运算处理技术,使得系统运动轨迹平滑。通过本公开的处理方案,可以让医生进行轻便的拖动操作,同时也实现高稳定性与高负载能力,在实际临床应用中具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!