一种手术室智能辅助系统
本发明涉及医疗器械,尤其涉及一种手术室智能辅助系统。
背景技术:
1、在手术医疗过程中,通常是患者首先躺在病床上,然后再由医生操作手术器械对患者进行手术,大多手术均由主刀医生站立并弯腰完成,而对于一些手术时间较长的手术,长时间站立会导致医生双腿发酸,影响操作,因此需要专用的手术室座椅帮助医生进行手术。有鉴于此,市场出现了各种座椅。
2、例如,公开号为cn113952043a的中国发明专利申请,公开了一种医师座椅,其包括椅座、扶手和行走轮组件,以及座椅调节结构,其能够实现座椅前后和上下调节,而且还能够实现座椅部和靠椅部的角度调节,尤其是靠椅部自身还能够高度调节,使得椅座能够满足不同医师工作或休息时,此外,靠背部和座椅部收折方便,体积小,便于运输。
3、又如,公告号为cn205586090u的中国实用新型专利申请,其公开了一种显微外科手术座椅,其包括一个支撑底座、坐垫以及支撑底座下的可旋转支柱和支撑脚。该座椅能够使不同身高、肩宽、臂展的手术医生方便的根据自己的需要向前后、左右、上下各个方向来调整扶手的位置,提供多角度灵活稳固的支撑,从而使得手术医生在手术时能够将手臂放在最舒适的位置。
4、再如,公开号为cn107198577a的中国发明专利申请,其公开了一种智能手术座椅,其通过链各个腿部固定装置固定在腿部,通过铰接在一起的电缸一方面不妨碍使用者的正常行走,另一方面可以辅助使用者保持站姿,从而保证腿部的放松;在使用者需要前倾时,本发明通过电缸、真空发生器和吸盘的配合,缓解使用者腿部和腰部的压力,并且能够通过机械臂来拾取手术用具。
5、然而,目前这些所有用来辅助医生完成手术的座椅都是采用地面式座椅,并且仅仅只考虑了缓解医生生理疲劳的问题,而完全忽略了手术室内实际上器械较多,行走空间较小的问题,因此,当将上述座椅放置到手术室内,不仅使得手术室内器械更多,反而进一步降低了手术可行走空间。
6、另一方面,现有的地面座椅都是需要医生作用于座椅上,然后由座椅底部的滑轮在地面滑动来顺应医生的移动。然而,实际手术过程中,以可能需要移动的幅度大多比较小,甚至可能脚部不移动,而仅仅是需要腰部或臀部小幅度移动,只有当医生拿取物品等情况下,可能才需要离开手术位,也即产生较大幅度的移动,因此,采用滑轮的方式使得座椅移动过于灵活,不便于医生掌握具有的移动幅度,反而需要医生的脚部或腿部发力去限制座椅移动的幅度。
技术实现思路
1、本发明的目的在于提供一种手术室智能辅助系统,部分地解决或缓解现有技术中的上述不足,能够在不过多占用手术室空间的基础上,缓解医生因手术长期站立和弯腰所引起的疲劳和身体损失。
2、为了解决上述所提到的技术问题,本发明具体采用以下技术方案:
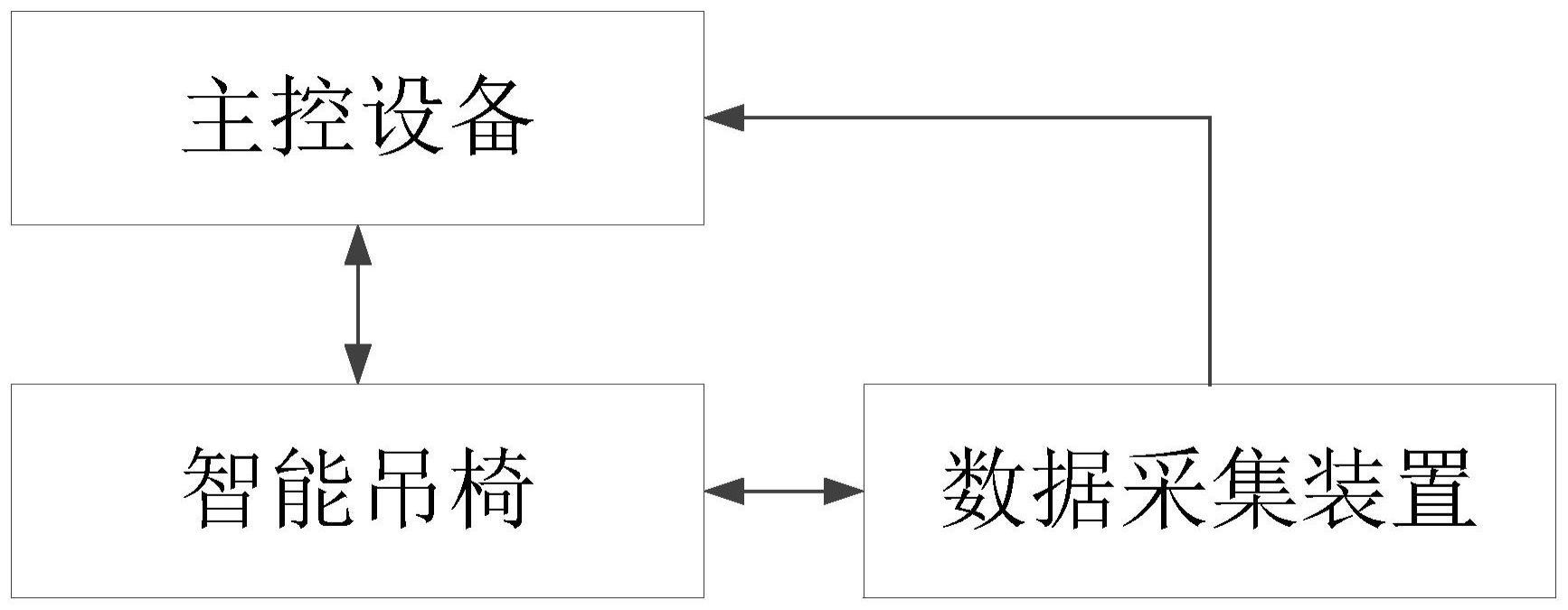
3、一种手术室智能辅助系统,其包括:悬挂式的智能吊椅,数据采集模块和主控设备,其中,
4、所述智能吊椅用于用户在手术过程中提供支撑或跟随移动;其包括:多轴式机械臂和可折叠座椅,所述多轴式机械臂的固定端固定在手术室顶部,所述多轴式机械臂的末端与所述可折叠座椅可拆卸连接;
5、所述数据采集模块用于采集用户信息;所述用户信息包括:语音数据,图像数据和运动数据;
6、所述主控设备用于根据所述数据采集模块所采集到的语音数据,控制所述智能吊椅放下或回收,以及根据所述图像数据和所述运动数据识别出用户的当前状态,并根据所述当前状态切换所述智能吊椅的工作模式;其中,所述当前状态包括:坐姿且位于手术位,或者站姿且位于手术位,或者动态且位于手术位,或者动态且远离手术位;所述工作模式包括静态支撑和动态跟随,所述静态支撑包括站姿支撑和坐姿支撑,所述动态跟随包括手术位内的跟随移动。
7、在一些实施例中,该主控设备包括:
8、第一控制模块,用于接收数据采集模块发送来的语音数据,并识别其对应的控制指令类型,若为表示放下座椅的控制指令,控制所述多轴式机械臂的末端自动与所述可折叠座椅进行紧固连接;若为表示收回吊椅的控制指令,控制所述多轴式机械臂将所述可折叠座椅送至所述消毒收纳舱内进行收纳,且当所述可折叠座椅被收纳后,控制所述多轴式机械臂末端与所述可折叠座椅自动脱离后进行收纳;
9、第二控制模块,用于根据苏搜图像数据判断用户当前是否位于手术位,且当根据图像数据判断出当前位于手术位时,根据运动数据判断当前为站姿状态,还是坐姿状态,还是小幅度运动状态;若为站姿状态,控制所述多轴式机械臂带动可折叠座椅的臀部支撑机构位于用户的臀部或臀部下方,从而给予站姿支撑;若为坐姿状态,控制所述多轴式机械臂带动可折叠座椅移动,使得可折叠座椅的腰部支撑机构和臀部支撑机构分别贴合于用户的腰部和臀部,从而给予坐姿支撑;若为小幅度移动,根据运动数据控制吊椅进行随动;若不是手术位内的小幅度运动状态,控制所述智能吊椅停止跟随移动。
10、在一些实施例中,所述数据采集模块包括:分别与所述主控设备进行数据通信的语音数据采集单元、图像数据采集单元和运动数据采集单元。
11、优选地,所述图像数据采集单元包括设置在手术室顶部的高清摄像设备。
12、优选地,所述运动数据采集单元包括集成在所述智能吊椅上的gps定位设备和压力传感器。
13、在一些实施例中,所述多轴式机械臂包括:固定端固定在手术室顶部的刚性机械臂,气动柔性机械臂和柔性机械臂动力装置,其中,所述柔性机械臂动力装置设置在所述刚性机械臂末端,并与所述气动柔性机械臂相连。
14、在一些实施例中,所述可折叠座椅包括腰部支撑机构、臀部支撑机构,以及连接所述髋部机构和臀部机构的气动柔性连接机构。
15、在一些实施例中,所述的一种手术室智能辅助系统还包括:设置在所述手术室顶部,用于收纳所述智能吊椅的消毒收纳舱,所述智能吊椅的刚性机械臂的固定端通过机械臂固定件固定在所述消毒收纳舱内。
16、在一些实施例中,所述髋部机构包括用于支撑用户腰部的支撑背板,所述支撑背板的支撑面设置有柔性腰垫,且所述柔性腰垫内设置有传感装置;所述臀部机构包括:与所述柔性连接件的末端连接的固定件,以及设置在所述固定件两侧,用于支撑用户臀部的两片支撑椅板,所述支撑椅板的支撑面设置有柔性坐垫。
17、在一些实施例中,所述柔性连接件包括串联的多个椎节,以及贯穿所述椎节的气道管路,所述气道管路与所述柔性坐垫内的充气空间相连通。
18、在一些实施例中,所述背板的两侧底部还铰接有椅翼。
19、有益效果:1)相较于现有技术所有地面式的手术室座椅,本发明打破了传统手术室的传统布局,换句话说,打破了人们传统思维中座椅就应该放置在地面的这种思维定式,充分利用了手术室顶部空旷的空间,采用吊椅的方式,使得当需要使用时,将该吊椅放下,不需要使用时,将其收纳至手术室顶部即可。
20、2)相较于现有技术所有地面式的手术室座椅,通过滑轮的方式来实现座椅移动,然而实际手术过程中可能需要移动的幅度大多比较小,甚至可能脚部不移动,而仅仅是需要腰部或臀部小幅度移动,只有当医生拿取物品等情况下,可能才需要离开手术位,也即产生较大幅度的移动,因此,采用滑轮的方式使得座椅移动过于灵活,不便于医生掌握具有的移动幅度,反而需要医生的脚部或腿部发力去限制座椅移动的幅度。本发明中的吊椅通过多轴式机械臂中的气动柔性机械臂及集成在腰部结构上的定位装置或传感器装置来检测用户的小幅度移动,从而根据检测到的小幅度移动来实现小幅度(例如,几度)的跟随移动(例如,跟随腰部和臀部移动),使得医生更容易且更轻松地实现小幅度移动。进一步地,通过设置在腰部支撑机构和/或臀部支撑机构中的传感装置(如gps定位、电位器或压力传感器等)检测医生腰部或臀部的运动数据,并结合到图形数据来识别医生的状态,从而根据医生不同的状态来切换不同的工作模式,例如,站姿支撑或坐姿支撑,或者小幅度随动,从而无需医生腿部或脚部发力作用于地面来推动地面座椅移动,而是由主控设备根据医生的状态来实现“主动跟随”,为医生手术过程提供了大大的便利。
21、3)现有技术所有地面式的手术室座椅,不仅需要医生手动移动座椅,而且还需要单独做座椅进行手动消毒,一定程度地增加了医务人员的工作量。本发明的吊椅在其顶部安装位集成了一个消毒收纳舱,使得当该吊椅的座椅部分被收纳至消毒舱内后可自动进行消毒,无需单独进行手动消毒,并且,可自动将座椅放下或收纳后即可。
22、本发明的该吊椅整体采用了悬挂三段式结构,能够实现稳定随动,语音唤醒,自动消毒,影像记录等多项功能,减轻医生长时间站立对身体造成的负担,提供更加舒适的手术操作环境。
- 还没有人留言评论。精彩留言会获得点赞!