一种座椅随动悬停支撑的外骨骼辅助吊架的制作方法
本发明涉及医疗康复设备,具体涉及一种座椅随动悬停支撑的外骨骼辅助吊架。
背景技术:
1、近年来,世界人口老龄化问题日益严重,由于运动系统损伤、脑血管疾病以及脊髓损伤等疾病造成的患者下肢运动功能障碍的情况大幅增加。在面对下肢运动能力受损患者的康复治疗中,外骨骼机器人可协助下肢功能障碍的患者进行功能和步态的康复训练,由于大脑具有可塑性,通过训练可使大脑重建下肢运动功能,从而使患者逐渐恢复下肢运动的能力,实现自主行走。
2、外骨骼作为辅助下肢功能障碍患者进行行走的机器人,可根据患者的损伤程度以及个体化差异生成个性化运动康复方案,代替康复医师进行重复繁琐的康复训练,但对于发病初期的患者或者病情较为严重的患者,还不能在使用外骨骼的时候维持身体平衡,需要通过其他人员扶持或固定装置辅助。此外,由于下肢外骨骼康复机器人具有一定重量,目前现有的相关设备中,重量普遍在12公斤到30公斤,若该部分重量施加在本就有运动功能障碍的患者身上,会大大降低康复治疗效果。为解决上述问题,将辅助吊架配合外骨骼机器人使用,可使患者在康复训练过程中达到减重和平衡维持的目的。
3、在现有技术中,已有辅助吊架帮助患者在步态下肢外骨骼机器人康复训练中解决了平衡维持以及设备减重的问题,但辅助吊架在结构和功能上仍存在一些问题需要进一步完善。如专利公布号为cn 112315752 a的中国发明专利公开了一种多功能无源跟随吊架,所述吊架包括底盘、设置在底盘上的立柱以及设置在立柱上的用于连接外骨骼机器人的环形力臂,还包括了可进入跟随吊架内部供使用者随时休息的c型椅,所述环形力臂的臂端部设置有连接外骨骼机器人的连接件,所述连接件与环形力臂之间设置有纵向滑动调节部,所述纵向滑动调节部通过滑块在导轨内的上下纵向滑动实现对使用者在行走过程中髋部的上下起伏调节。所述吊架中c型椅的设置可以为使用者提供休息座位,避免了当使用者体力不支或出现其他情况时由于无快速休息位置时,强行坚持行走到休息位置时发生的安全隐患,或者无法快速提供休息座位,需要挑选座位塞进跟随吊架内。但c型椅需要借助他人的辅助将其移动到合适位置使用者才可坐下休息,使用者并不能对c型椅进行自主控制和使用,并不能根据使用者的意愿实现随时的快速休息。
4、专利公布号为cn 115804705 a的中国发明专利公开的一种可拆卸式移动下肢外骨骼装置,其中具体公开了一种用于辅助下肢外骨骼的外骨骼辅助支架,所述外骨骼辅助支架包括主架结构、坐具结构、腰部结构以及用于带动腰部结构上下移动的升降结构,其中腰部结构下降时,坐具结构伸出;当所述腰部结构上升,坐具结构折叠。所述坐具结构通过与升降结构的机械联动,实现了座椅的随动收放,使得使用者能够对座椅进行自行控制和使用,实现使用者的随时快速休息。在该发明中,所述坐具结构包括基板、凳板组件、支撑条和底部固定件;所述基板一侧与所述腰部结构固定连接,所述基板底部与所述凳板组件铰接;所述支撑条一端与所述凳板组件铰接,所述支撑条另一端与所述底部固定件铰接;所述底部固定件与所述外骨骼辅助支架固定连接。由此可见,该发明座椅采用的是一端固定、另一端承重的悬臂梁式结构,而悬臂梁式的座椅将会对相关零部件、材料提出更高的要求来满足座椅的承载结构强度。同时由于下肢康复外骨骼的使用群体为下肢运动功能障碍人群,在使用外骨骼康复训练时,从坐到站立的这个过程是一个缓慢升降的过程,会持续受到人体及外骨骼设备的重力影响,需要升降结构的升降电推杆电机提供推力去抵消这部分力量,导致升降电推杆的负载大,容易出故障,而且该重力的影响会让使用者潜意识的使用上肢力量去减轻由于臀部没有支撑带来的下坠感,使得使用者在起立过程中得不到放松,体验感不好,甚至由于用力过大对上肢造成伤害。
技术实现思路
1、有鉴于此,针对上述现有技术的不足,本发明提供一种座椅可随动悬停支撑的外骨骼辅助吊架。
2、为部分地解决或缓解以上技术问题,本发明的技术方案提供了一种座椅随动悬停支撑的外骨骼辅助吊架,它包括:
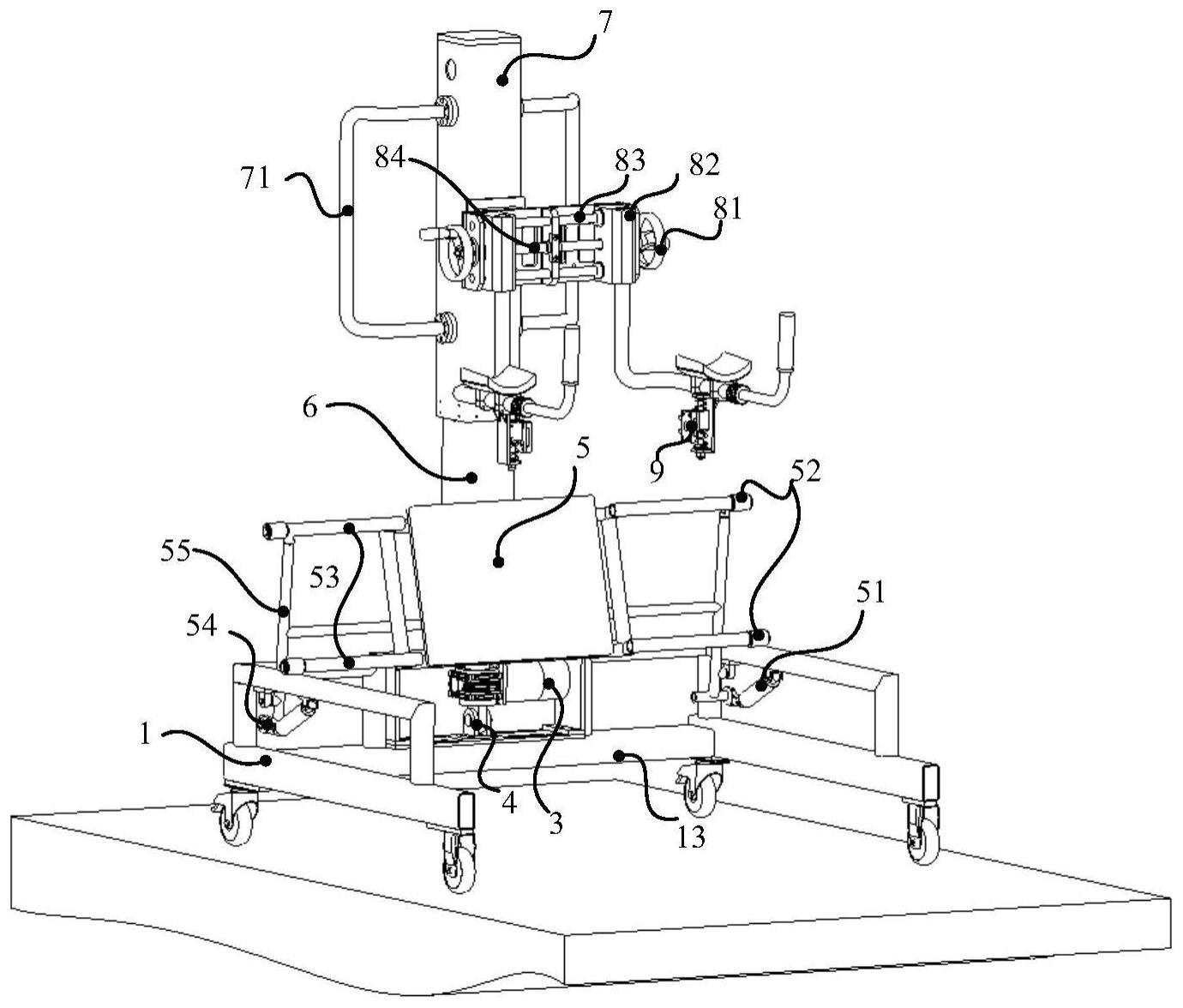
3、可移动底盘,包括用于支撑座椅部和升降部的底盘框架和固定在底盘框架下用于辅助吊架移动的滑动轮组;
4、座椅部,包括固定在底盘框架上的支撑架、设置在支撑架上的座椅机构和驱动座椅机构在支撑架上滑动的连杆机构;通过座椅机构在支撑架上的滑动实现座椅机构在支撑架上的向下展开和向上收回的收放动作;
5、升降部,包括固定在底盘框架上的下立柱和套设在下立柱外可沿下立柱上下移动的上立柱,所述上立柱外部固定有外骨骼连接机构,所述外骨骼连接机构与外骨骼机器人可拆卸连接;所述外骨骼连接机构包括:外骨骼连接装置,所述外骨骼连接装置包括与外骨骼机器人对接的插销连接底座,所述插销连接底座内固定有导向杆,所述导向杆从上至下依次套设有第一刚度弹簧、直线轴承和第二刚度弹簧,所述直线轴承上固定插销块,所述外骨骼机器人以插销连接的方式固定在插销块上;其中,第一刚度小于第二刚度;
6、传感模块,设置在所述上立柱和下立柱之间,用于获取所述上立柱沿下立柱向上的移动位移量,或向下的移动位移量;
7、控制设备,用于根据所述上立柱的上下移动动作联动控制所述座椅机构的收放动作,包括根据所述上立柱沿下立柱向上的移动位移量控制所述座椅机构在支撑架上的向上收回幅度,所述上立柱沿下立柱向下的移动位移量控制所述座椅机构在支撑架上的向下展开幅度;令θ表征所述座椅机构在的收回幅度或展开幅度,令l表征所述上立柱的移动位移量,则其中,d为所述连杆机构中座椅电推杆的行程距离。
8、上述技术方案提供的外骨骼辅助支架,通过座椅部与升降部的联动设计,可以使座椅随外骨骼连接机构的下降而展开,上升而折叠,让使用外骨骼机器人的患者能够对座椅进行自主控制和使用,使患者可脱离他人辅助自主进行外骨骼康复训练,降低康复治疗师的工作负担。本发明通过升降部的升降位移量来精确控制座椅的收放幅度,使座椅能够在使用者的站立或坐下过程中随时对使用者臀部提供支撑,一方面可以减轻立柱电推杆的负载,另一方面也可以使用户放松上肢力量。而座椅部通过支撑架的结构设计对座椅提供支撑,可以加强座椅的承载结构强度,保证使用者的安全。并且,本发明在与外骨骼机器人的连接处,通过直线轴承和设置在直线轴承上下不同刚度的弹簧实现外骨骼在垂直轴方向上的变阻尼运动,达到运动过程中人体重心上下跟随的目的。
9、由于人的行走过程是一个对称性运动,当外骨骼机器人在行走动作时,支撑一侧的外骨骼的骨盆位置降低,重心向支撑侧偏移,而摆动侧的骨盆位置会相对变高,并存在一个施加在摆动侧骨盆向上的力,该向上的力会传递至摆动侧的吊架上,进而导致对辅助吊架两侧施加的力不平衡,破坏吊架的稳定性。本技术基于步态对称性,通过设置上下不同刚度的弹簧,将重心偏移导致对吊架的力,缓冲到支撑侧直线轴承下方的大刚度弹簧,以及摆动侧直线轴承上方的小刚度弹簧,可进一步提高设备使用期间的稳定性,提高舒适性。
10、进一步地,在站立状态下,外骨骼与辅助吊架连接处,也就是插销块销孔中心轴线所在平面,应当与人体重心所处平面一致,此时直线轴承上下方的弹簧均不受力,而致使弹簧压缩的力来源于重心所处平面上方的人体重量,将该部分重量平分到直线轴承的上下方弹簧,在行走时,由于摆动侧下肢悬空,直线轴承上方的弹簧所承受的力为分担之后的力再减去单侧下肢的重力,因此,在直线轴承的上方设置小刚度弹簧,下方设置大刚度弹簧。
11、进一步的,所述座椅机构包括连接在一起的前座椅杆和后座椅杆,所述连杆机构包括座椅电推杆、座椅摇杆以及铰接连接座椅电推杆和座椅摇杆的连杆,所述后座椅杆的两端与所述座椅摇杆铰接,所述前座椅杆的两端设置在支撑架上。座椅电推杆推动连杆动作,连杆推动座椅摇杆动作,座椅摇杆推动前座椅杆在支撑架上滑动从而实现座椅机构在支撑架上的展开和收回的收放动作。
12、优选的是,所述支撑架上设置有导轨,所述前座椅杆的两端设置有导向滑块,所述导向滑块设置在所述导轨内。通过导轨的设置可以对前座椅杆的滑动进行导向,避免前座椅杆偏离运动方向。
13、进一步的,所述上立柱与立柱电推杆连接,通过立柱电推杆带动上立柱沿下立柱进行上下的移动动作。
14、进一步的,所述立柱电推杆由步进电机驱动,通过步进电机脉冲结合丝杠螺距可计算出上立柱移动的位移量,从而可通过上立柱的移动位移量来控制座椅机构的收放幅度。
15、进一步的,所述传感模块为设置在所述上立柱与下立柱之间的磁致伸缩位移传感器,通过磁致伸缩位移传感器可快速测量得到上立柱沿下立柱移动的位移量。
16、进一步的,所述外骨骼连接机构还包括外骨骼宽度调节装置、与外骨骼宽度调节装置连接的支撑扶手部,所述外骨骼连接装置固定在支撑扶手部下方。
17、进一步的,所述外骨骼宽度调节装置包括扶手滑块和驱动扶手滑块左右移动的手摇丝杠结构,所述支撑扶手部与所述扶手滑块连接,可通过手摇丝杠结构调节吊架的两侧宽度。
18、进一步的,所述支撑扶手部包括连接管和l型把手,所述连接管一端固定在所述扶手滑块上,另一端通过楔块式夹紧机构与所述l型把手连接。扶手长度可通过楔块式夹紧机构调节。
19、进一步的,所述支撑扶手部上设置有前臂支撑软垫,所述前臂支撑软垫的下方设置所述外骨骼连接装置。
20、与现有技术相比,本发明提供了一种座椅随动悬停支撑的外骨骼辅助吊架,该吊架供患者使用的座椅可随吊架立柱的升降进行自动收放,从而让使用外骨骼的患者在需要休息的时候,不再需要他人辅助即可自行控制座椅的使用,实现自主休息,在对外骨骼设定好康复训练方案后,患者可完全脱离康复医师进行自主康复训练,可降低康复治疗师的工作负担。此为,本发明提供的外骨骼辅助吊架还具备以下优点:
21、1)现有技术中,通过将座椅与升降机构中的外立柱进行机械联动,当外立柱向上运动来带动座椅向下折叠,外立柱向下运动带动座椅展开,这就使得无论是从坐到站立过程中,还是从站立到坐下过程中臀部都没有任何支撑,虽然可通过升降电推杆来抵消部分重力影响,然而重力的影响仍然会让使用者使用上肢力量去减轻由于臀部没有支撑带来的下坠感,从而使得使用者在无论是在起立过程中还是坐下过程中得不到放松,体验感不好,甚至由于用力过大对上肢造成疲劳和伤害。而本发明通过根据升降部上立柱的移动位移量来控制座椅的收放幅度:即当上立柱上移动时,通过控制座椅向上收回,而当上立柱下移动时,通过控制座椅向下展开,并且根据上立柱上下移动量来精确控制座椅向上收回或向下开展的幅度,从而使得座椅能够在使用者的站立或坐下过程中随时对使用者臀部提供支撑,进而使用户一定程度地放松上肢力量,提升设备使用感受(即用户体验);同时,也可以减轻立柱电推杆的负载。
22、2)座椅部通过支撑架的结构设计对座椅提供支撑,可以加强座椅的承载结构强度,保证使用者的安全。
23、3)外骨骼连接装置中通过在直线轴承的上下方设置不同刚度的弹簧实现外骨骼在垂直轴方向上的变阻尼运动,达到运动过程中人体重心上下跟随的目的,从而提高设备在使用期间的稳定性和舒适性。
24、4)外骨骼宽度调节装置可通过手摇丝杠结构同步调节吊架的两侧宽度,支撑扶手部通过楔块式夹紧机构可在一定范围内对其长度进行自由调节,手摇丝杠调节宽度的方式和楔块式夹紧机构调节长度的方式简单快捷,可使设备适用于不同身形的患者使用。
25、5)本发明辅助吊架基于人体工程学而进行结构设计,更有利于脊髓损伤患者使用下肢康复外骨骼机器人进行康复训练。
- 还没有人留言评论。精彩留言会获得点赞!