在位检测装置和手术机器人的制作方法
本公开涉及医疗器械,尤其涉及在位检测装置和手术机器人。
背景技术:
1、手术器械通常在细长管的一端处具有手术工具形式的后端执行机构,例如钳子、剪刀、夹子等。所述后端执行机构的常规运动结构是采用钢丝绳来转动后端执行机构,以完成俯仰、偏转和夹握的动作。
2、外科医生在控制台侧控制手术侧驱动器上的器械,为满足手术中不同手术器械使用需求,手术器械与器械驱动器通常设计为可拆卸性,用于在手术中更换不同手术器械需求,同时手术器械通常为可以独立的消毒灭菌。
3、器械驱动器端通常设计为不可消毒性,为保证手术过程中的无菌性,在手术时,需要在器械驱动器与器械间加入一个无菌适配器,用于隔离手术时不可消毒的器械驱动器端以及可消毒的器械端。
4、手术器械后端与无菌适配器上表面连接,器械驱动器与无菌适配器下表面进行连接,器械驱动器通过无菌适配器对手术器械后端执行机构提供驱动力,达到完成俯仰、偏转和夹握的动作目的。
5、无菌适配器以及手术器械后端安装后需要保持连接稳定,在没有安装无菌适配器手术器械,或者安装后取下了无菌适配器或者手术器械,或者因一些故障无菌适配器或者手术器械从系统上脱离出,手术系统上能迅速的检测出无菌适配器以及手术器械的存在状态,反馈到机器人系统中,能避免因无菌适配器以及手术器械不在时的误操作,或者无菌适配器以及手术器械使用中脱离后的误操作,提高手术机器人的安全性。
6、手术器械装设于无菌适配器时,可以被控制的执行操作,有必要提供一种途径,能够确定手术器械安装到位,能够被远程操控。
技术实现思路
1、本技术提供一种手术器械的在位检测装置,至少解决部分以上技术问题。
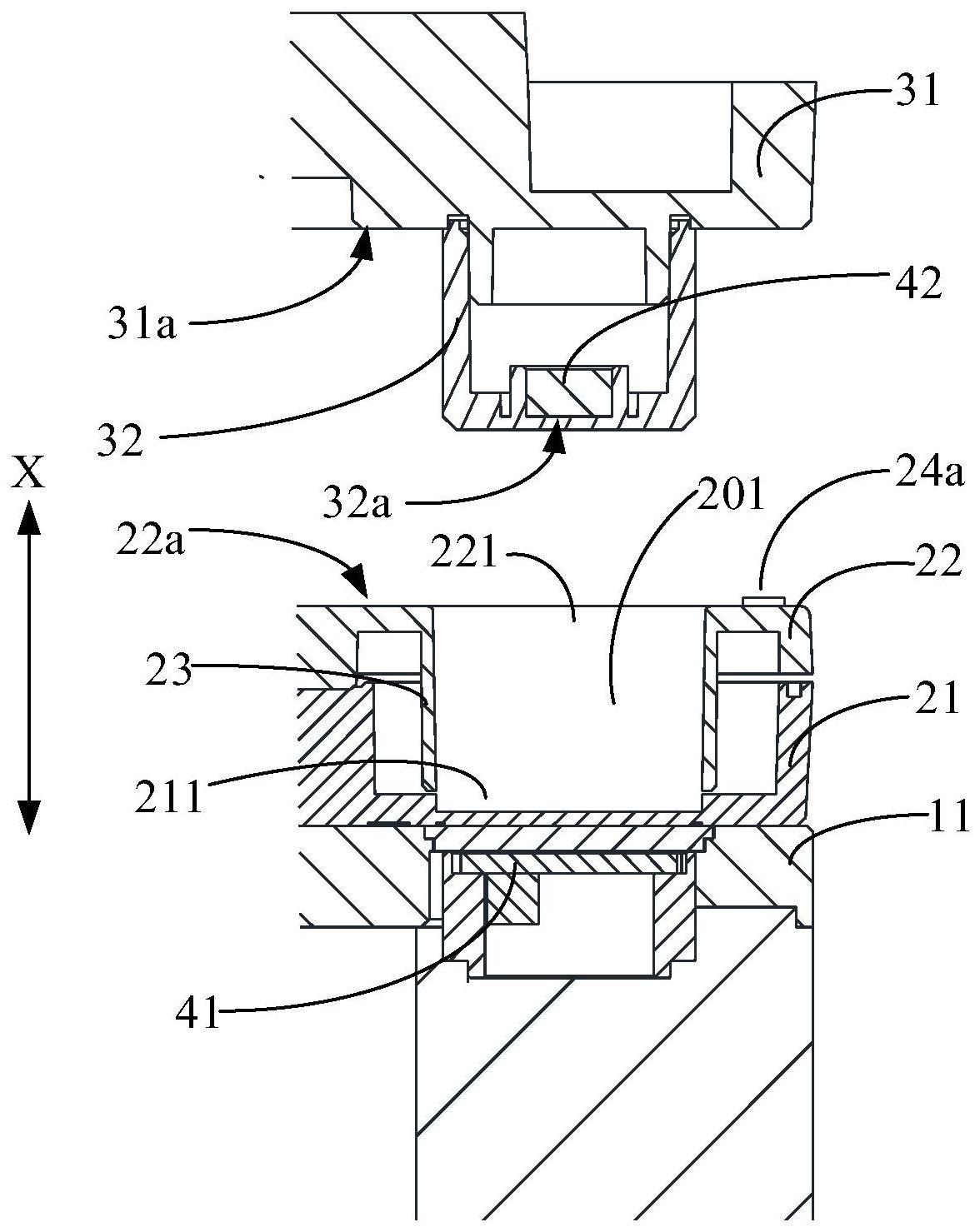
2、本技术公开的第一方面,提供一种手术器械的在位检测装置,用于器械驱动器、无菌适配器和手术器械的对接,其中器械驱动器包括有第一板件,无菌适配器包括有第二板件和第三板件,第二板件和第三板件固定连接,手术器械包括有第四板件,其中,所述第一板件于第二板件对接,第二板件与第四板件对接,所述器械驱动器、所述无菌适配器和所述手术器械对接时,至少部分所述第一板件、至少部分所述第二板件、至少部分所述第三板件和至少部分所述第四板件沿第一方向依次叠设,其中手术器械的在位检测装置包括:
3、被检测器件;
4、检测器件,所述检测器件设置于器械驱动器,所述检测器件固定设置于所述第一板件,所述检测器件位于所述第一板件背离于和所述第二板件对接的一侧;
5、其中,检测器件能够随手术器械与无菌适配器的对接和拆卸而靠近或远离所述检测器件。
6、在上述技术方案中,检测器件固定设置于第一板件,将被检测器件可以设置于手术器械或无菌适配器,通过检测器件检测被检测器件从而得知手术器械是否在位或装配到位。
7、优选地,所述被检测器件设置于所述手术器械,所述被检测器件固定设置于所述第四板件;或
8、所述被检测器件设置于所述无菌适配器。
9、优选地,当所述手术器械和所述无菌适配器完成对接时,所述被检测器件位于所述第二板件和所述第三板件之间,且所述被检测器件更靠近所述第二板件。
10、优选地所述第一板件包括第一表面,至少部分所述第一表面包括有平面部分,所述第一表面的平面部分垂直于第一方向,所述第二板件包括第二表面,至少部分所述第二表面设包括有平面部分,所述第二表面的平面部分垂直于第一方向,第三板件包括第三表面,至少部分所述第三表面包括有平面部分,所述第三表面的平面部分垂直于第一方向,所述第四板件包括第四表面,至少部分所述第四平面包括有平面部分,所述第四表面的平面部分垂直于第一方向;
11、其中,所述第一表面能够和所述第二表面对接,当所述器械驱动器和所述无菌适配器对接时,所述第一表面和所述第二表面隐藏,且所述第一表面的平面部分和第二表面的平面部分对接,当所述器械驱动器和所述无菌适配器未对接时,所述第一表面和所述第二表面裸露;
12、其中,所述第三表面能够和所述第四表面对接,当所述无菌适配器和所述手术器械对接时,所述第三表面和所述第四表面隐藏,且所述第三表面的平面部分和所述第四表面的平面部分对接,当所述无菌适配器和所述手术器械未对接时,所述第三表面和所述第四表面裸露;
13、其中,当所述器械驱动器、无菌适配器、手术器械三者处于对接状态时,所述第一表面的平面部分和所述第四表面的平面部分之间的距离大于所述第二表面的部分平面和所述第三表面的平面部分之间的距离;或
14、当所述器械驱动器、无菌适配器、手术器械三者处于对接状态时,所述第二表面的平面部分和所述第四表面的平面部分之间的距离大于所述第二表面的平面部分和所述第三表面的平面部分之间的距离;或
15、当所述器械驱动器、无菌适配器、手术器械三者处于对接状态时,所述第一表面的平面部分和第三表面的平面部分之间的距离大于所述第二表面的平面部分和所述第三表面的平面部分之间的距离。
16、优选地,所述无菌适配器包括有至少3个定位柱,至少3个所述定位柱中的至少3个定位柱非同一直线排列,所述定位柱包括有定位端面,所有所述定位柱的所述定位端面位于同一平面;
17、其中,所有所述定位柱固定设置于所述第二板件,所述定位柱穿过所述第三板件,所述定位柱包括有定位端面,所述定位端面超出于位于所述第三表面的平面部分;或
18、所有所述定位柱固定设置与第三板件,所述定位柱穿过所述第二板件,所述定位柱包括有定位端面,所述定位端面超出于位于所述第二表面的平面部分。
19、优选地,所述定位柱与所述第二板件一体成型,或
20、所述定位柱与所述第一板件一体成型。
21、优选地,所述手术器械包括凸出部件,所述凸出部件凸出于所述第四板件,所述第四板件包括有第四表面,所述第四表面用于与无菌适配器对接,至少部分所述第四表面设置为平面,所述第四表面的平面部分垂直于所述第一方向,所述凸出部件超出于所述第四表面的平面部分,所述被检测器件固定设置于所述凸出部。
22、优选地,所述被检测器件装设于所述凸出部件的并远离所述第四表面的端部。
23、优选地,所述凸出部件与所述第四板件分体设置,所述凸出部件与所述第四板件固定连接;或
24、所述凸出部件与所述第四板件一体成型。
25、优选地,所述无菌适配器开设有第一腔,所述第一腔位于所述第二板件和第三板件之间,所述第三板件开设有第一孔,所述第一腔通过所述第一孔与外界连通,所述第一腔使得至少部分所述第二板件的背离于所述器械驱动器的一侧表面形成裸露,所述凸出部可以通过所述第一孔插入所述第一腔。
26、优选地,所述第二板件开设有凹部,所述凹部朝向所述第三板件,且所述凹部在所述第三板件的投影与所述第一孔重合。
27、优选地,所述被检测器件设置于所述无菌适配器,所述被检测器件固定连接有弹性柱,当所述手术器械与所述无菌适配器脱离时,弹性柱的端部超出于所述无菌适配器的第三表面,当所述手术器械与所述无菌适配器对接时,所述弹性柱的端部抵接于所述手术器械。
28、优选地,所述在位检测装置包括:
29、第一抵接面,所述第一抵接面相对于所述弹性柱固定设置;
30、第二抵接面,所述第二抵接面相对于所述弹性柱固定设置;
31、第三抵接面,所述第三抵接面相对于所述无菌适配器固定设置;
32、第四抵接面,所述第四抵接面相对于所述无菌适配器固定设置;
33、弹性件;
34、其中,所述第一抵接面、第二抵接面、第三抵接面和第四抵接面均与所述第一方向垂直,所述第一抵接面和第二抵接面朝向相反,所述三抵接部和第四抵接部朝向相向,所述弹性件抵接于所述第一抵接面和所述第三抵接面之间,所述第二抵接面和第四抵接面可相互抵接。
35、优选地,所述在位检测装置包括:
36、弹性柱;
37、抵接块,所述抵接块相对于所述弹性柱固定设置,所述第一抵接面位于所述抵接块,所述第二抵接面位于所述抵接块;
38、承载组件,所述承载组件固定设置于所述无菌适配器,所述承载组件包括有第一承载件和第二承载件,所述承载组件开设有第二腔,至少部分所述第二腔开设于所述第一承载件,至少部分所述第二腔开设于所述第二承载件,所述第一承载件开设有第二孔,位于所述第一承载件的部分所述第二腔的直径大于位于所述第二承载件的部分所述第二腔的直径,所述第三抵接面位于所述第二承载件,所述第四抵接面位于所述第一承载件;
39、其中,所述弹性柱穿过所述第二孔,所述第一抵接面与所述第三抵接面抵接有弹簧,所述第二抵接面与所述第四抵接面可相互抵接。
40、优选地,所述在位检测装置包括多个被检测器件和多个检测器件,多个所述检测器件分散排布于所述器械驱动器,多个所述被检测器件与所述检测器件位置一一对应。
41、优选地,所述检测器件至少包括霍尔元件,所述被检测器件至少包括磁性元件。
42、根据本技术的第二方面,还提供一种手术机器人,包括上述任一所述的在位检测装置,以及器械驱动器、无菌适配器和手术器械。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!