一种外骨骼设备的自主站立方法及外骨骼设备与流程
本发明属于外骨骼,具体涉及一种外骨骼设备的自主站立方法及外骨骼设备。
背景技术:
1、外骨骼技术是一种强化机器人技术,被广泛应用于康复和军事等领域。外骨骼技术的发展使得即使在有残障或普通人在完成某些高负载任务时也可以保证其人的稳定性和安全性。
2、目前,外骨骼技术已经发展出多种类型的外骨骼设备,例如下肢外骨骼、上肢外骨骼、全身外骨骼等可以被人类穿戴的外骨骼设备。外骨骼设备能够增强人类的力量、灵活性和耐力,它通过传感器和执行器等各种硬件装置与人体肌肉和神经系统进行交互,将人体及其衍生物理动作转变成电子信号,并将这些信号传输到外部程序中以实现生理学运动功能的自然升级。
3、现有外骨骼设备的站立功能主要是通过机电联动来实现,包括直接通过机械方式来维持身体的稳定,或者通过驱动器件完成身体的姿态控制等方式来实现,部分复杂的外骨骼设备还可能需要进行大量的操作步骤以便正确地驱动各个部件,导致使用者学习使用较为困难,特别是对于老年人群体需要花费更长时间来学会上手使用,体验并不友好。
技术实现思路
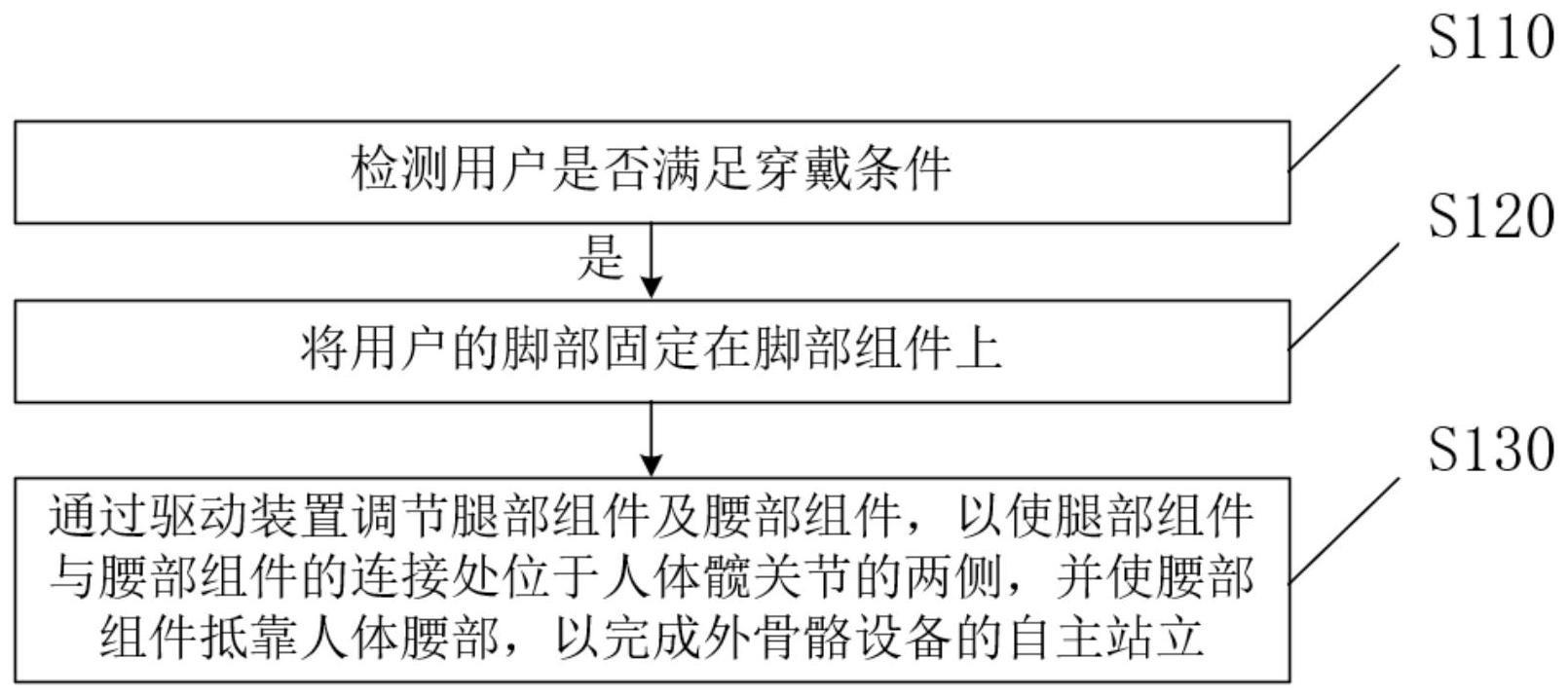
1、为了克服上述现有技术的缺陷,本发明提出了一种外骨骼设备的自主站立方法,应用于包括驱动装置和依次连接的腰部组件、腿部组件、脚部组件的外骨骼设备,所述方法包括:
2、若检测到用户满足穿戴条件,将所述用户的脚部固定在所述脚部组件上;
3、通过所述驱动装置调节所述腿部组件及所述腰部组件,以使所述腿部组件与所述腰部组件的连接处位于人体髋关节的两侧,并使所述腰部组件抵靠人体腰部,以完成所述外骨骼设备的自主站立。
4、具体地,所述腿部组件包括分别用于支撑人体左腿和右腿的两个腿部支架,任一所述腿部支架包括大腿辅助杆和小腿辅助杆,所述大腿辅助杆的一端与所述腰部支架转动连接,另一端与所述小腿辅助杆转动连接,所述“通过所述驱动装置调节所述腿部组件及所述腰部组件”包括:
5、通过所述驱动装置,调节所述大腿辅助杆和所述腰部组件之间的转动幅度,以及调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度。
6、具体地,所述驱动装置包括设置于所述大腿辅助杆与所述腰部支架连接处的腰部电机,所述“调节所述大腿辅助杆和所述腰部组件之间的转动幅度”包括:
7、通过所述腰部电机直接调节所述大腿辅助杆和所述腰部组件之间的转动幅度。
8、可选地,所述驱动装置还包括设置于所述腿部支架的腿部电机,任一所述腿部支架还包括第一传动杆和第二传动杆,所述第一传动杆的两端分别与所述大腿辅助杆、所述第二传动杆的第一端转动连接,所述第二传动杆的第二端与所述小腿辅助杆转动连接,所述“调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度”包括:
9、通过所述腿部电机直接调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度;
10、或,通过所述腿部电机调节所述大腿辅助杆与所述第一传动杆之间的转动幅度的方式,以间接调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度;
11、或,通过所述腿部电机调节所述小腿辅助杆与所述第二传动杆之间的转动幅度的方式,以间接调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度;
12、或,通过所述腿部电机调节所述第一传动杆与所述第二传动杆之间的转动幅度的方式,以间接调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度。
13、可选地,所述“通过所述驱动装置调节所述腿部组件及所述腰部组件,以使所述腿部组件与所述腰部组件的连接处位于人体髋关节的两侧,并使所述腰部组件抵靠人体腰部”包括:
14、通过所述驱动装置先调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度,待所述大腿辅助杆与所述腰部组件的连接处位于人体髋关节的两侧后,再通过所述驱动装置调节所述大腿辅助杆和所述腰部组件之间的转动幅度,以使所述腰部组件抵靠人体腰部;
15、或,通过所述驱动装置调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度,同时调节所述大腿辅助杆和所述腰部组件之间的转动幅度,使所述大腿辅助杆与所述腰部组件的连接处位于人体髋关节的两侧,并使所述腰部组件抵靠人体腰部。
16、可选地,所述“通过所述驱动装置调节所述大腿辅助杆和所述腰部组件之间的转动幅度,以及调节所述大腿辅助杆和所述小腿辅助杆之间的转动幅度”包括:
17、通过所述驱动装置增大所述大腿辅助杆和所述小腿辅助杆之间的第一角度,直至所述第一角度达到第一预设角度值;通过所述驱动装置增大所述腰部组件与所述大腿辅助杆之间的第二角度,直至所述第二角度达到第二预设角度值;所述第一预设角度值为135°-180°,所述第二预设角度值为160°-210°;
18、或,增设第一限位件和第二限位件,使所述驱动装置基于所述第一限位件的限位固定所述大腿辅助杆和所述腰部组件之间的相对角度,基于所述第二限位件的限位固定所述大腿辅助杆和所述小腿辅助杆之间的相对角度。
19、优选地,所述腰部组件与人体腰部的抵靠侧设有第一压力传感器,所述“通过所述驱动装置调节所述腿部组件及所述腰部组件,使所述腰部组件抵靠人体腰部”还包括:
20、通过所述驱动装置调节所述腿部组件及所述腰部组件,直至所述第一压力传感器承受的压力超过预设的第一压力值时,判断所述腰部组件抵靠人体腰部;
21、或,所述腰部组件内侧设有光敏传感器,所述“通过所述驱动装置调节所述腿部组件及所述腰部组件,使所述腰部组件抵靠人体腰部”还包括:
22、通过所述驱动装置调节所述腿部组件及所述腰部组件,直至所述光敏传感器感受的光照强度低于预设的光照强度值时,判断所述腰部组件抵靠人体腰部。
23、优选地,所述脚部组件包括鞋板和埋设于所述鞋板的第二压力传感器,所述“检测用户是否满足穿戴条件”包括:
24、通过所述第二压力传感器判断所述鞋板承受的压力是否超出预设的第二压力值;
25、若所述鞋板承受的压力超出所述第二压力值,判断用户满足穿戴条件。
26、进一步地,所述外骨骼设备还包括锁止组件,所述驱动装置还包括设置于所述腿部组件与所述脚部组件连接处的踝部电机,所述锁止组件包括锁止杆、锁止槽和用于对所述踝部电机起限位作用的第三限位件,所述“固定所述腿部组件与人体腿部的连接”包括:
27、通过所述踝部电机调节所述脚部组件与所述腿部组件之间的转动幅度,并基于所述第三限位件固定所述脚部组件与所述腿部组件之间的相对角度;
28、通过所述驱动装置控制所述锁止杆插入锁止槽,以固定所述脚部组件与人体脚部的连接。
29、所述方法还包括:
30、在所述用户完成所述外骨骼设备的穿戴后,检测所述用户是否满足解除条件;
31、若满足,通过所述驱动装置调节所述腿部组件及所述腰部组件,以使所述腿部组件与所述腰部组件落下并以初始状态置于所述用户站立的平面;
32、解除所述用户脚部与所述脚部组件的固定。
33、本发明还提出了一种外骨骼设备,用于实现如前文所述的外骨骼设备的自主站立方法。
34、本发明至少具有以下有益效果:
35、通过本发明提出的方案,外骨骼设备可以在检测到用户满足穿戴条件后,通过驱动装置调节腿部组件和腰部组件,以自主完成站立,无需用户支持,提高了穿着者使用外骨骼设备的舒适度和稳定性;驱动装置可以调节大腿辅助杆和腰部组件之间的转动幅度,以及大腿辅助杆和小腿辅助杆之间的转动幅度,实现腿部组件与腰部组件的连接处位于人体髋关节的两侧,并使腰部组件抵靠人体腰部,符合人体工程学和人体姿势的原则,提高用户舒适度和站立稳定性;
36、驱动装置可通过第一限位件和第二限位件固定大腿辅助杆和腰部组件之间的角度和大腿辅助杆和小腿辅助杆之间的相对角度,通过在腰部组件抵靠侧设置压力传感器,可以判断腰部组件抵靠人体腰部,帮助进行腿部组件及腰部组件的调节,提高了人体接触部位的舒适度和贴合度;
37、此外,脚部组件设置的压力传感器可检测用户是否满足穿戴条件,还设置有用于对踝部电机起限位作用的第三限位件,以此固定脚部组件和人体脚部连接,增加了外骨骼设备的稳定性,提高了用户穿戴的安全性。
38、以此,本发明提供了一种外骨骼设备的自主站立方法及外骨骼设备,本发明提出的方案根据人体自然姿态进行控制,更加符合人体的自然姿势及重心,通过驱动装置的调节,能够更快速地反应人体的姿态调整,大大提升外骨骼设备的稳定性和安全性,设备采用非挂载式的设计,能够更加精确地匹配不同用户的身体特征,提高使用舒适度和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!