手指张合康复训练装置
本发明涉及一种康复训练装置,具体涉及一种手指张合康复训练装置。
背景技术:
1、如今,手部机能不全的患者越来越多,在手功能受到伤害出现运动障碍的时候,会对患者的生活方式和生活质量产生巨大影响,因此,手部机能的康复也越来越受到人们的重视。随着康复治疗理念的不断变化,康复训练装置已经不只作为一种代偿患者功能的技术,它的价值体现在了患者康复过程的各个方面。基于脑卒中患者的康复训练需求与医疗资源严重匮乏的现实矛盾,目前市面上存在多种用于手指康复训练装置,但这些装置基本都是用来训练手指弯曲的,无法做到对手指的张合训练,无法满足患者的需求。
技术实现思路
1、针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种能够对手指进行张合康复训练的装置。
2、为了解决上述技术问题,本发明采用了的技术方案:
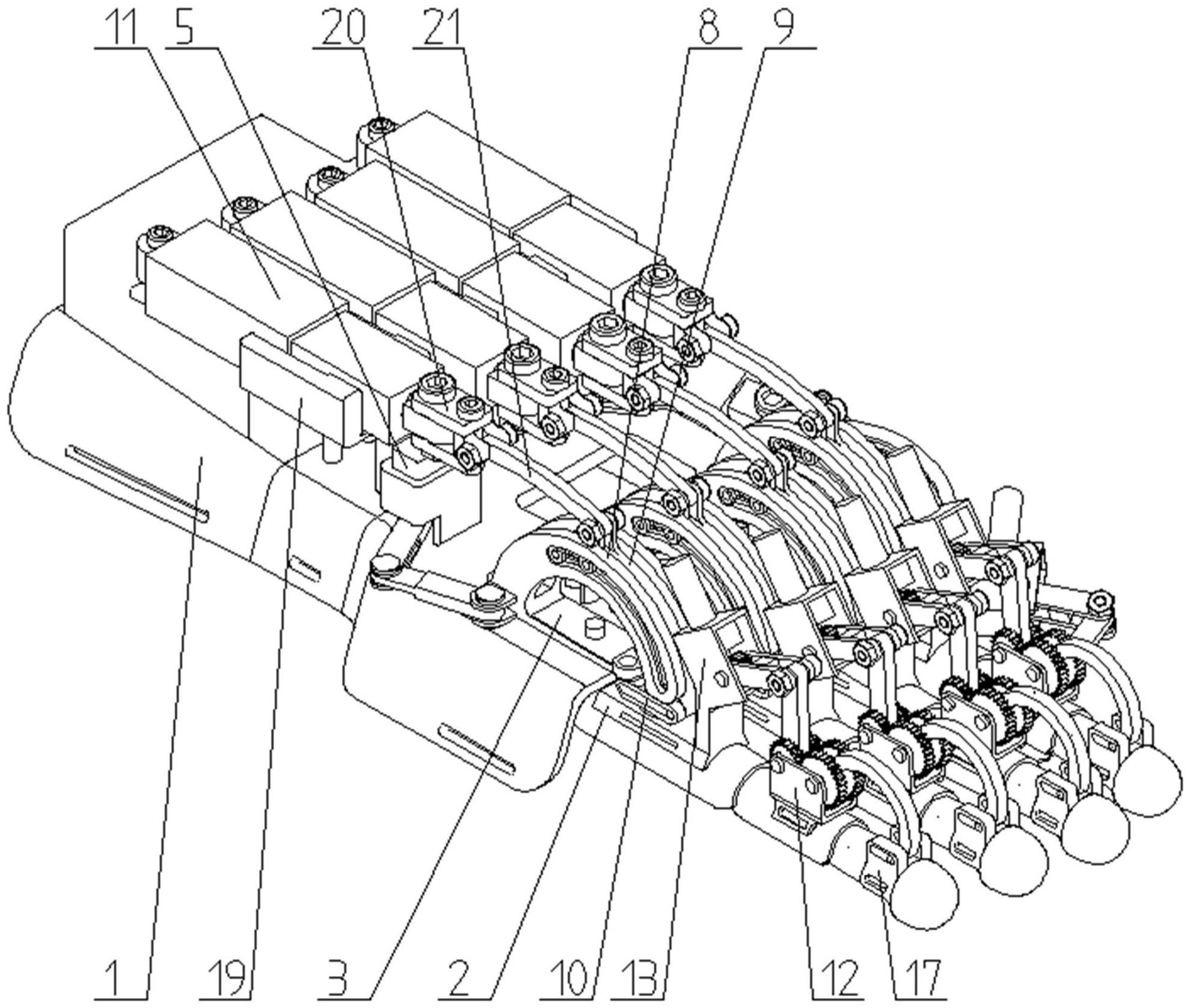
3、一种手指张合康复训练装置,包括手背固定板,手背固定板的前方且分别对应食指、中指、无名指和小指的位置设置有掌指指座,手背固定板的顶面前端分别对应各掌指指座的位置设置有张合驱动座,张合驱动座与手背固定板之间通过旋转轴ⅰ转动连接在一起,旋转轴ⅰ的中心线方向垂直于手背固定板的顶面,位于内侧的张合驱动座对应的旋转轴ⅰ位置位于外侧相邻的张合驱动座对应的旋转轴ⅰ位置的斜前方,张合驱动座与其对应的掌指指座之间通过掌指驱动架固定连接在一起,位于外侧的两个张合驱动座分别与其内侧相邻的张合驱动座之间设置有张合支架,张合支架分别通过旋转轴ⅱ与其对应的两个张合驱动座转动连接在一起,旋转轴ⅱ的中心线方向平行于旋转轴ⅰ的中心线方向,位于内侧的两个张合驱动座上分别凸起形成有绕其上旋转轴ⅰ中心线方向环设的凸齿,两个凸齿相互啮合配合在一起,手背固定板的顶面上且对应其中一个外侧的张合驱动座的位置固定连接有张合驱动装置,张合驱动装置作用在对应的张合驱动座上以能够驱动张合驱动座绕其对应的旋转轴ⅰ转动。
4、在本发明中,使用的时候,将手背固定板通过绑腹带绑缚固定在手背上,旋转轴ⅰ的位置分别对应个掌指关节的位置,然后将各掌指指座通过绑缚带对应绑缚固定在食指、中指、无名指和小指的掌指背面上,启动张合驱动装置,与张合驱动装置连接的张合驱动座就开始绕旋转轴ⅰ进行转动;在这个张合驱动座转动的同时,通过张合支架又可以拉动位于内侧相邻的张合驱动座进行转动,另外通过相互啮合的凸齿,又可以带动内侧另一个张合驱动座转动,同理又通过另一个张合支架带动外侧的另一个张合支架进行转动。外侧的张合驱动座对应的旋转轴ⅰ与内侧相邻的张合驱动座对应的旋转轴ⅰ位置不同,因此这两个张合驱动座转动的中心线不同,相应就能够控制内侧的张合驱动座和外侧相邻的张合驱动座的转动角度不同,也就使对应的食指与中指之间、无名指和小指之间相互张开;另外两个凸齿啮合的关系,两个凸齿对应的两个张合驱动座就会反方向进行转动,也就是使中指与无名指之间相互张开,进而使得四根手指全部张开,相反控制,就能控制四根手指进行闭合,达到控制手指进行张合训练的目的。
5、作为优化,所述张合支架包括连接条ⅰ和连接条ⅱ,连接条ⅰ和连接条ⅱ的一端通过铰轴ⅰ铰接连接,铰轴ⅰ的中心线方向垂直于所述旋转轴ⅰ的中心线方向,与所述张合支架对应的两个所述张合驱动座上的所述旋转轴ⅱ分别固定连接在两个所述张合驱动座的顶面和底面上,连接条ⅰ和连接条ⅱ上分别穿设有转动孔且通过转动孔套设在其对应的所述旋转轴ⅱ上,所述张合驱动座位于所述旋转轴ⅱ所在的一侧侧面上粘贴有磁力片ⅰ,连接条ⅰ和连接条ⅱ上分别对应磁力片ⅰ所在的一侧侧面上粘贴有与磁力片ⅰ相吸的磁力片ⅱ。
6、连接条通过旋转轴与张合驱动座转动配合在一起,并且通过磁力片相互吸引,进而与张合驱动座相固定。这样可以方便的对张合进行拆卸和安装,也就是可以对需要训练的手指进行控制。取下与张合驱动装置相邻的张合支架,那么就只能控制与张合驱动装置连接的张合驱动座的转动;如果取下远离张合驱动装置的那个张合支架,那么就只能控制距离张合驱动装置最近的三个张合驱动座的转动,进而实现对手指控制训练方式的多样性。
7、作为优化,位于外侧的所述张合驱动座上的所述旋转轴ⅱ的数量为两个,两个所述旋转轴ⅱ的中心线和其对应的所述旋转轴ⅰ的中心线位于同一平面上,所述连接条ⅰ上的所述转动孔的数量为两个,位于所述连接条ⅰ和所述连接条ⅱ上的三个所述转动孔的中心线位于同一平面上,位于所述连接条ⅰ上的任意一个所述转动孔套设在其中任意一个所述旋转轴ⅱ上。
8、通过位于连接条ⅰ上不同转动孔与不同旋转轴的转动连接,进而控制张合支架对应两个张合驱动座之间张开的距离,进一步实现对手指控制训练的多样性。
9、作为优化,所述掌指驱动架包括掌指导轨和掌指推杆,掌指导轨与掌指推杆均为弧形结构且弯曲曲率一致,掌指导轨的一端固定连接在所述张合驱动座上,另一端朝向所述掌指指座所在方向延伸,所述掌指指座的顶面上设置有旋转座,旋转座与掌指指座之间通过旋转轴ⅲ转动连接在一起,旋转轴ⅲ的中心线方向垂直于所述掌指指座的顶面,旋转座上延伸设置有滑轨ⅰ,滑轨ⅰ的延伸方向与所述旋转轴ⅲ的中心线方向相垂直,掌指推杆的一端滑动连接在掌指导轨上且能够沿掌指导轨延伸方向相对于掌指导轨进行伸缩,另一端滑动连接在滑轨ⅰ上且能够沿滑轨ⅰ延伸方向进行移动,所述手背固定板的顶面对应每个所述掌指驱动座的位置均设置有掌指驱动装置,掌指驱动装置作用在掌指推杆上且能够驱动掌指推杆进行移动,当掌指推杆向外伸出时,掌指推杆能够对掌指指座进行下压;
10、掌指指座的前方设置有近指指座,掌指指座的顶面上固定连接有近指驱动座,近指驱动座上设置近指摇杆,近指摇杆的一端通过驱动轴ⅰ转动连接在近指驱动座上,驱动轴ⅰ的中心线方向与掌指导轨所在平面相垂直,另一端设置有近指驱动杆且通过铰轴ⅱ与近指驱动杆的一端铰接连接,近指驱动杆的另一端通过驱动轴ⅱ转动连接在近指指座上,铰轴ⅱ的中心线方向和驱动轴ⅱ的中心线方向均平行于驱动轴ⅰ的中心线方向,近指驱动座上设置有近指驱动装置,近指驱动装置作用在近指摇杆上且能够驱动近指摇杆绕驱动轴ⅰ中心线方向进行转动,当近指摇杆进行转动时,近指摇杆能够驱动近指驱动杆对近指指座进行下压;
11、近指指座的前方设置有远指指座,远指指座的顶面上延伸设置有滑轨ⅱ,近指指座和远指指座之间设置有远指驱动杆,远指驱动杆为弧形结构,远指驱动杆的一端通过驱动轴ⅲ转动连接在近指指座上,另一端滑动连接在滑轨ⅱ上且能够沿滑轨ⅱ延伸方向进行移动,近指驱动杆与远指驱动杆之间设置有远指传动装置,近指驱动杆通过远指传动装置与远指驱动杆传动连接在一起,当近指摇杆进行转动时,近指摇杆能够通过近指驱动杆和远指传动装置驱动远指驱动杆对远指指座进行下压。
12、除了对手指的张合控制训练外,本发明还可以做到本手指的曲伸进行控制训练。近指指座和远指指座分别通过绑缚带绑缚在对应指节上,掌指驱动装置能够推动掌指推杆向外伸出,掌指推杆在向外伸出的过程中,就会对掌指指座进行下压,因为掌指导轨和掌指推杆均为弧形,因此就能够推动掌指绕掌指关节向下转动;而近指驱动装置驱动近指摇杆转动,通过近指驱动杆的推动,可以控制近指绕近指关节向下转动;近指摇杆转动会使近指驱动杆的位置发生变化,进而通过远指传动装置传递给远指驱动杆,也就是远指绕远指关节向下转动,最终实现整根手指的弯曲。另外旋转座可以避免手指张合训练和弯曲训练时结构发生干涉,也可以降低对手背固定板安装位置的限制,提高系统的容错率。
13、作为优化,所述掌指驱动装置包括电动推杆,所述手背固定板的顶面上固定连接有对所有电动推杆进行固定支撑的安装支架,电动推杆的前端伸出有能够朝向所述手背固定板前方进行伸缩的伸缩推杆,伸缩推杆的前端设置有连接块,连接块的后端通过摆动轴ⅰ与伸缩推杆转动连接在一起,摆动轴ⅰ的中心线方向平行于旋转轴ⅰ的中心线方向,连接块与所述掌指推杆之间设置有连接推杆,连接推杆的一端通过摆动轴ⅱ与连接块的前端转动连接在一起,另一端通过摆动轴ⅲ与所述掌指推杆转动连接在一起,摆动轴ⅱ的中心线方向和摆动轴ⅲ的中心线方向均垂直于所述掌指推杆所在平面。通过摆动轴ⅰ和摆动轴ⅱ实现方向改变。
14、作为优化,近指驱动装置包括固定连接在所述近指驱动座上的电机,电机的电机轴上传动连接有蜗杆,所述驱动轴ⅰ转动连接在所述近指驱动座上,所述驱动轴ⅰ上套装有与其传动连接的蜗轮,蜗轮与蜗杆配合连接在一起,所述近指摇杆远离所述铰轴ⅱ的一端套设在所述驱动轴ⅰ上且与所述驱动轴ⅰ传动连接在一起。
15、作为优化,所述驱动轴ⅱ转动连接在所述近指指座上,所述近指驱动杆远离所述铰轴ⅱ的一端套设在所述驱动轴ⅱ上且与所述驱动轴ⅱ传动连接在一起,所述驱动轴ⅲ转动连接在所述近指指座上,所述远指驱动杆远离所述远指指座的一端套设在所述驱动轴ⅲ上且与所述驱动轴ⅲ传动连接在一起,所述远指传动装置包括套装在所述驱动轴ⅱ上且与其传动连接的传动齿ⅰ和套装在所述驱动轴ⅲ上且与其传动连接的传动齿ⅱ,传动齿ⅰ与传动齿ⅱ啮合配合在一起。
16、相比现有技术,本发明不仅可以对手指的张合进行控制训练,还可以对手指的曲伸进行控制训练,训练方式种类更多,适应性更强。
- 还没有人留言评论。精彩留言会获得点赞!